Px4-autopilot: FW altitude control overshoot
FW altitude change, there is overshoot control
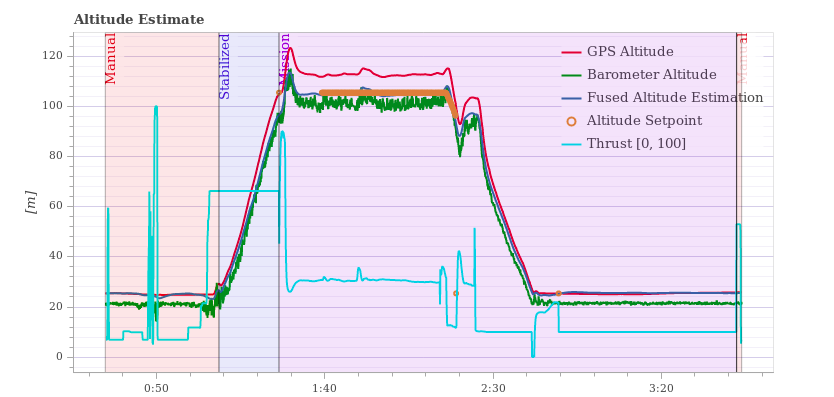
Looking at the pitch control, that is good for setpoint

the log attach is
Flight Review
and also discuss in
DroneCode Discussion
 jinchengde
jinchengde
All 31 comments
@jinchengde You need to have a look at the TECS topic on the log in order to understand what is going on.
From a quick glance at the log it looks like the actual height rate is overshooting the demanded one by far.
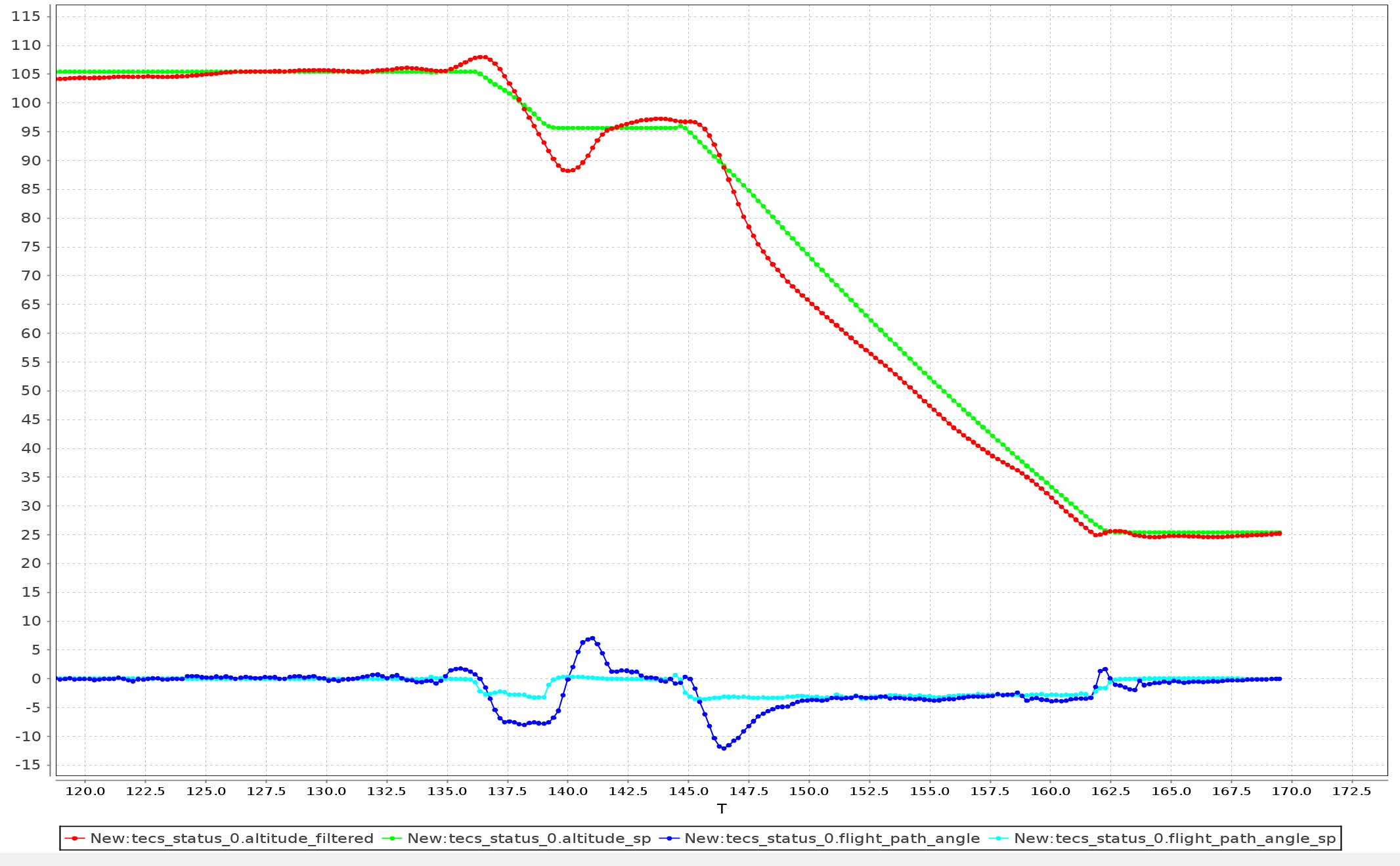
Can you try to reduce FW_T_HRATE_FF to see if that improves the situation?
 RomanBapst
on 17 Sep 2018
RomanBapst
on 17 Sep 2018
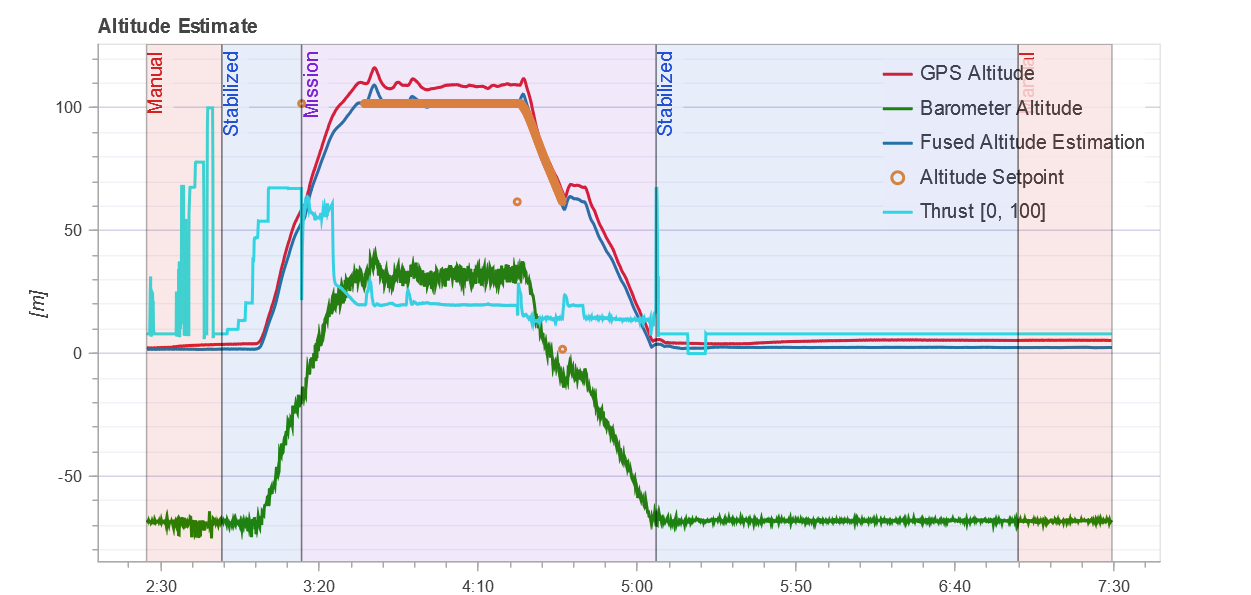
@RomanBapst @dagar I thought this was a know problem with FW altitude control? We were able to reduce the overshoot effect slightly by adjusting the TECS tuning, but the pronounced overshoot is still there every time we have a large altitude change.
Here is one of our random flight logs as a reference:
https://review.px4.io/plot_app?log=7c1cf5af-38f4-4f05-8924-8a26f7ac16ac
 Antiheavy
on 17 Sep 2018
Antiheavy
on 17 Sep 2018
@RomanBapst @dagar
I also test in SITL gazebo plane and it also have overshoot during automatic takeoff, here is the video for you reference
SITL Gazebo Plane
No effect even if I set FW_T_HRATE_FF to zero
jinchengde
on 18 Sep 2018
@RomanBapst @dagar We've had the same problem. It was even worse in 1.7.3 It works in both directions, ie. in steep pitch down. It seems like when you release the pitch stick to level the flight it takes some 1-2 sec for the craft to react, level and start follow its altitude set-point. The problem was visible in auto mission modes as well in 1.7.3 but now in 1.8 the mission flight got all the things better regarding the hrate settings and altitude hold. But still we have it visible during altitude mode flight.
 tubeme
on 19 Sep 2018
tubeme
on 19 Sep 2018
@priseborough any suggestions?
 dagar
on 19 Sep 2018
dagar
on 19 Sep 2018
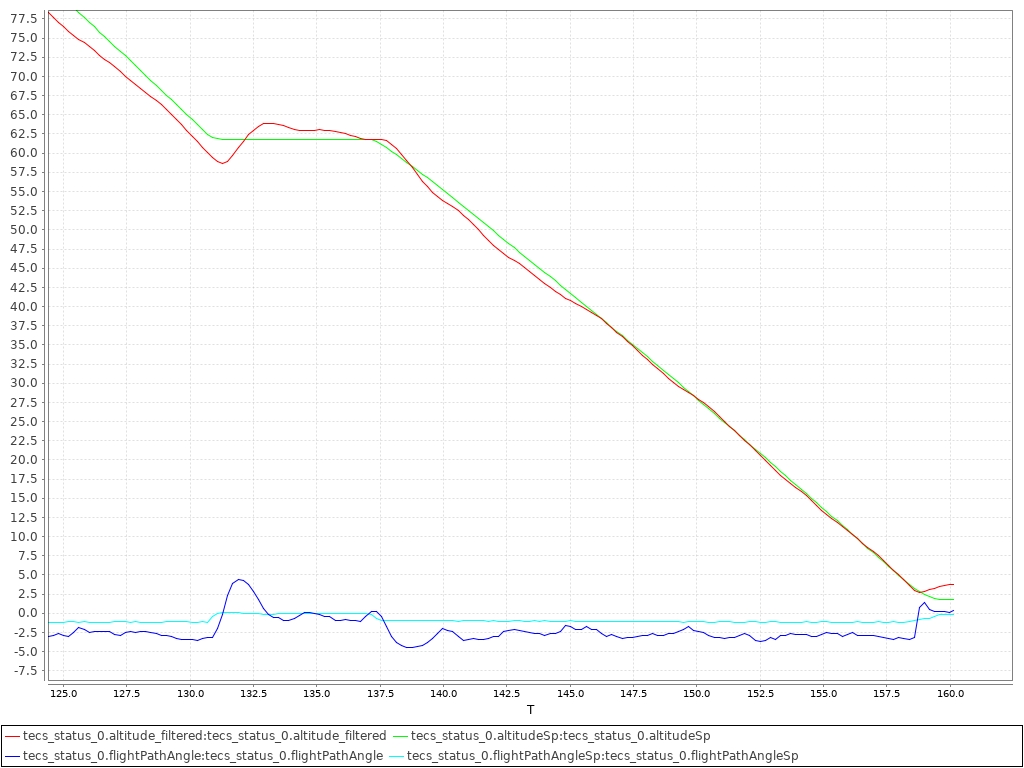
@RomanBapst @dagar
set FW_T_HRATE_FF to 0.6
https://logs.px4.io/plot_app?log=be9d4f9b-5116-43a0-965c-04acabf17c73
set FW_T_HRATE_FF to 0.4
https://logs.px4.io/plot_app?log=7be20f90-1e71-4896-bbd0-b0ffab32ab4e
the last one looks more smoothly but still have sharp in altitude control
jinchengde
on 7 Oct 2018
The input shaping applied to the height and height rate demand inside the TECS _update_height_setpoint function
https://github.com/PX4/ecl/blob/master/tecs/tecs.cpp#L250-L257
can be improved by making the time constant of LPF able to be explicitly set via a parameter. To eliminate overshoot this cannot be much less than the TECS time constant FW_T_TIME_CONST.
This will need to be done in conjunction with other changes to avoid steady state errors during constant rate climb and descent manouevres, rather than rely on the user adjusting a FW_T_HRATE_FF parameter.
I will come up with some changes this week.
 priseborough
on 16 Oct 2018
priseborough
on 16 Oct 2018
A second order filter structure with critical damping should enable the vertical acceleration, rate and controller bandwidth limits to be respected whilst maintaining zero steady state error during constant rate climb and descent.
priseborough
on 16 Oct 2018
@priseborough Look at what we came upon while tuning the hrate_ff gain.
In 1.8 we see much better response but still the same behavior on manual control.
https://github.com/PX4/Firmware/issues/8941#issuecomment-371755785
tubeme
on 16 Oct 2018
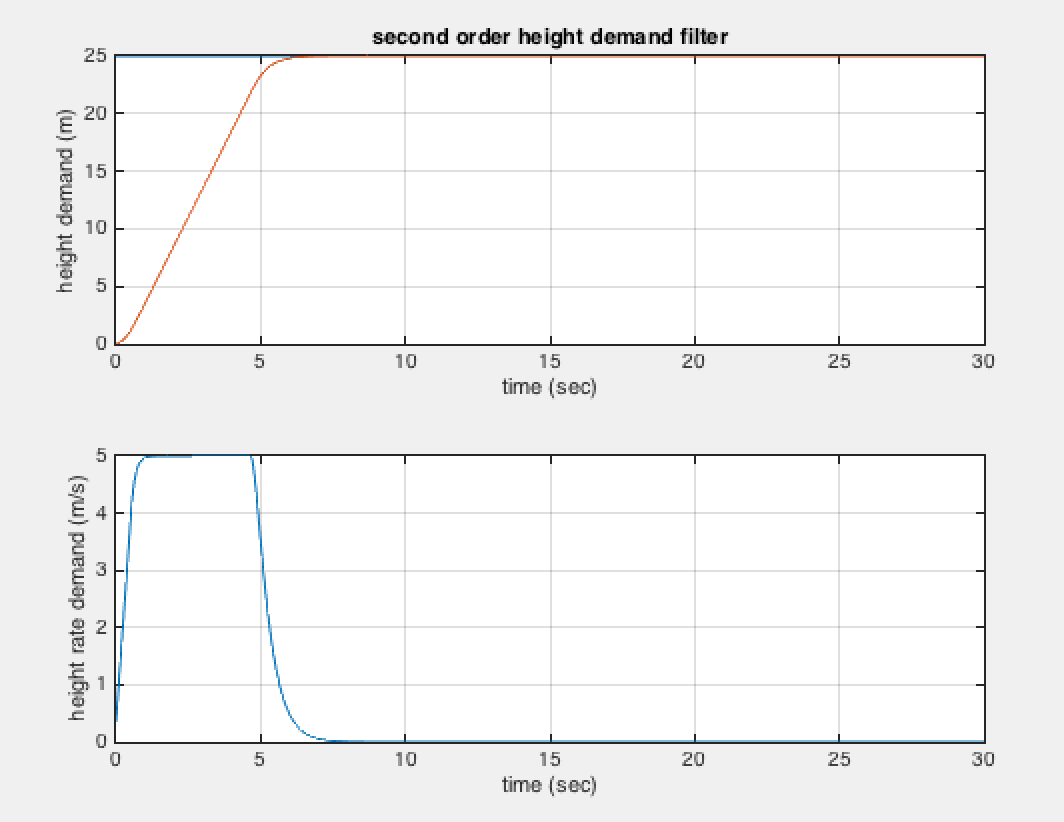
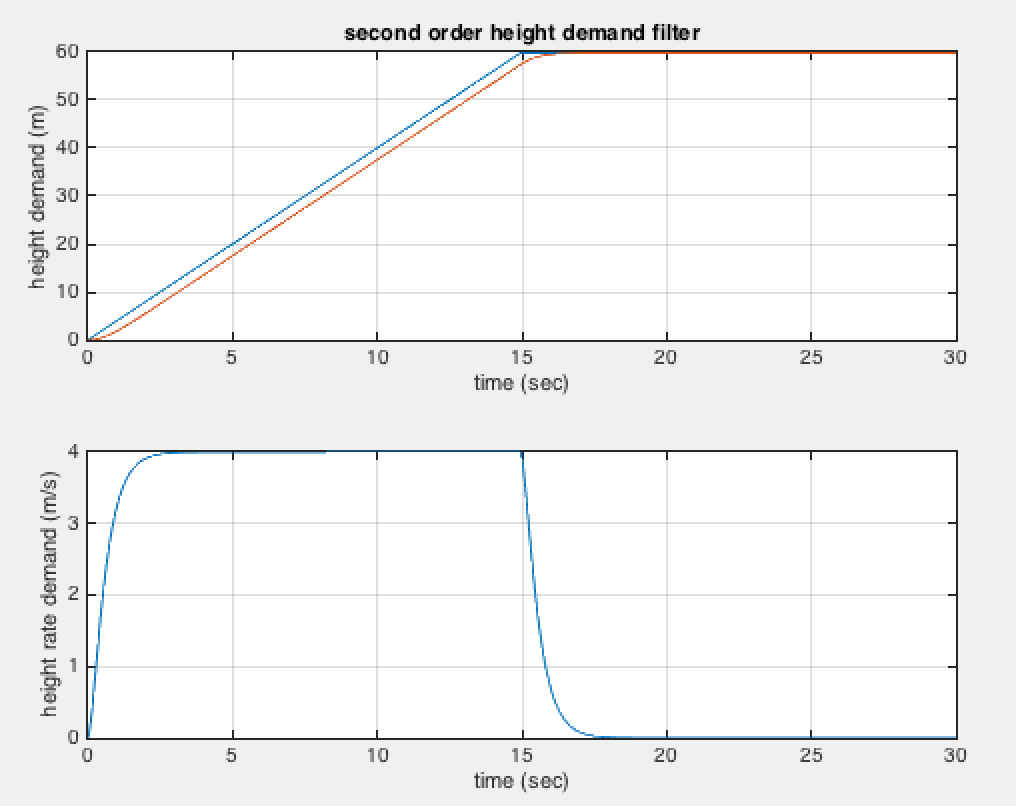
I've done some Matlab simulation work on an alternative algorithm for the input shaping. It works for ramps and steps, noting that with step inputs, any use of a predictor or integrator term to eliminate height error must result in overshoot as neither TECS or the input shaping filter have future knowledge of when the ramp will level off and the vehicle dynamics cannot perform the infinite acceleration required to do so without overshoot.
Step Demand Example
Ramp Demand Example
Ramp Demand Example - Integrator used to eliminate height offset
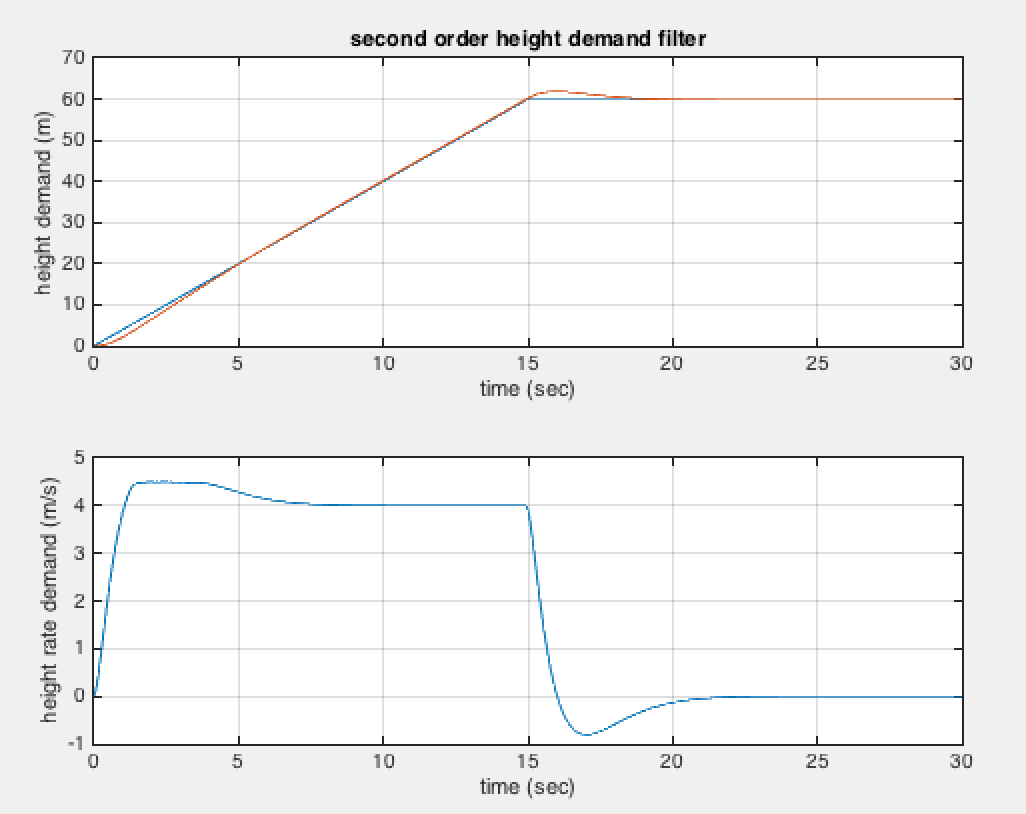
The only way we are going to be able to track ramp inputs without height offsets and overshoot is to incorporate move some responsibility for input shaping in the waypoint logic so that TECS is not asked to perform the physically impossible task of tracking a height profile with non continuous first derivative whilst maintaining zero steady state tracking error.
Matlab source code attached:
priseborough
on 16 Oct 2018
@bresch Could you please contribute here? It sounds like we should try to do what we’re doing for multicopter as well for TECS here.
 LorenzMeier
on 16 Oct 2018
LorenzMeier
on 16 Oct 2018
It is also worth noting that lag free tracking of a time varying hight input is most important during approach and flare. At other times in flight, eg climbing or descending between waypoints, some lag is normally not an issue. Other autopilot projects using the TECS algorithm work around this by applying the feed-forward correction during landing approach only. This would be an effective short term solution.
priseborough
on 16 Oct 2018
@priseborough I wrote a library to generate a time-optimal, jerk limited (bang-bang) trajectory based on desired velocity for multicopter velocity control mode (see the PR). Position or velocity can be used as the input of the controller and one or several derivative(s) can be used as feedforwards. We could use the same for FW manual control: the input is the desired velocity, based on the sticks.
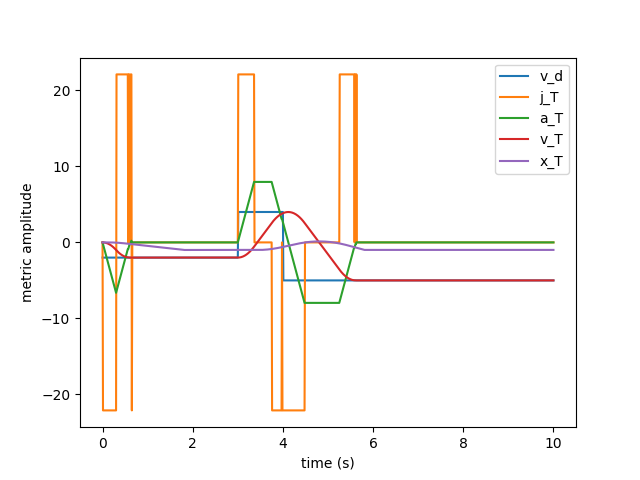
I'm planning to do the same for multicopter waypoint navigation (like it's usually done for pick-and-place industrial robots). This could be used to generate a smooth altitude trajectory + feedforwards for TECS in auto mode; do you think it could be a correct solution?
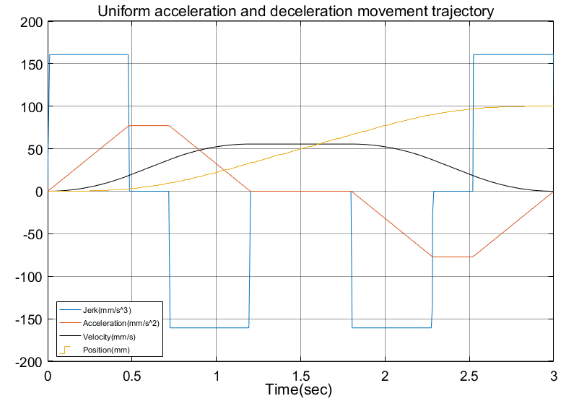
(image from _Design of third-order uniform acceleration and deceleration trajectory based on Simulink StateFlow_, Xudong Yang, Song Wang)
 bresch
on 16 Oct 2018
bresch
on 16 Oct 2018
neither TECS or the input shaping filter have future knowledge of when the ramp will level off
In an old PR that was never merged I moved the navigator altitude ramp handling into the FW position controller. https://github.com/PX4/Firmware/pull/8883
dagar
on 16 Oct 2018
@priseborough I only think we have to find a permanent solution. The plane is performing decently now despite the overshoots. There no overshoots in mission, such that we could see. At least not noticeable.
tubeme
on 18 Oct 2018
This issue has been automatically marked as stale because it has not had recent activity. It will be closed if no further activity occurs. Thank you for your contributions.
![stale[bot] picture](https://avatars3.githubusercontent.com/in/1724?v=4&s=40) stale[bot]
on 20 Jan 2019
stale[bot]
on 20 Jan 2019
would be great to see FW overshoot improvements someday.
Antiheavy
on 20 Jan 2019
Is #10746 fix this? @bresch
 bys1123
on 13 May 2019
bys1123
on 13 May 2019
@bys1123 Nope, the PR was for multicopter navigation only but the trajectory generator is in a library and could be reused here.
~However, as Paul demonstrated, a simple 2nd order critically damped input filter should fix the issue. If we don't need to have strict requirements on the maximum amplitude of the derivatives, I would just go with that filter.~
_Edit: I misunderstood what Paul said_
bresch
on 13 May 2019
as Paul demonstrated, a simple 2nd order critically damped input filter should fix the issue. If we don't need to have strict requirements on the maximum amplitude of the derivatives, I would just go with that filter.
curious, is anyone working on this already for fixed wing?
Antiheavy
on 14 May 2019
This issue has been automatically marked as stale because it has not had recent activity. It will be closed if no further activity occurs. Thank you for your contributions.
stale[bot]
on 15 Aug 2019
@RomanBapst @sfuhrer is this something that could get testing and brought in at some point?
 julianoes
on 15 Aug 2019
julianoes
on 15 Aug 2019
Dear colleagues,
Please tell, where can I find Thrust msg/value in PX4?
 logindiamant
on 8 Oct 2019
logindiamant
on 8 Oct 2019
@logindiamant your question seems off topic. Please create a new issue with more detail or ask a question in discuss.px4.io.
julianoes
on 9 Oct 2019
Peoples, who discussed this main issue publish Thrust value in logs... So, question is on topic, @julianoes
logindiamant
on 9 Oct 2019
Aha sorry @logindiamant. It comes from:
https://github.com/PX4/flight_review/blob/bb39d190b91bb29b5bd43997e26e31976f6b87be/plot_app/configured_plots.py#L331-L333
and therefore:
https://github.com/PX4/Firmware/blob/f9a5c91f8cc5f74ce8d2a0425f7b76d7af65a0a8/msg/actuator_controls.msg#L15
So it's actuator_controls_0[3].
julianoes
on 9 Oct 2019
Ooo, many thanks, @julianoes!!!
I created UAV model on nonlinear differential equations with input {roll, pitch, yawrate and thrust}, and just want to verify it on SITL and real fly UAVs. We plan to fuse model in our visual-inertial odometer
logindiamant
on 10 Oct 2019
This issue has been automatically marked as stale because it has not had recent activity. Thank you for your contributions.
stale[bot]
on 8 Jan 2020
This issue has been automatically marked as stale because it has not had recent activity. Thank you for your contributions.
stale[bot]
on 7 Apr 2020
This issue has been automatically marked as stale because it has not had recent activity. Thank you for your contributions.
stale[bot]
on 6 Jul 2020
This issue has been automatically marked as stale because it has not had recent activity. Thank you for your contributions.
stale[bot]
on 12 Oct 2020
Related issues
 taileron
·
51Comments
taileron
·
51Comments
 dyli96
·
40Comments
dyli96
·
40Comments
 dakejahl
·
27Comments
dakejahl
·
27Comments
 kd0aij
·
46Comments
kd0aij
·
46Comments
 LJ0707
·
29Comments
LJ0707
·
29Comments