Px4-autopilot: Auto sensor reading after pixhawk startup
Hi guys is there any method for sending messages through mavlink console while pixhawk startup or when pixhawk armed.
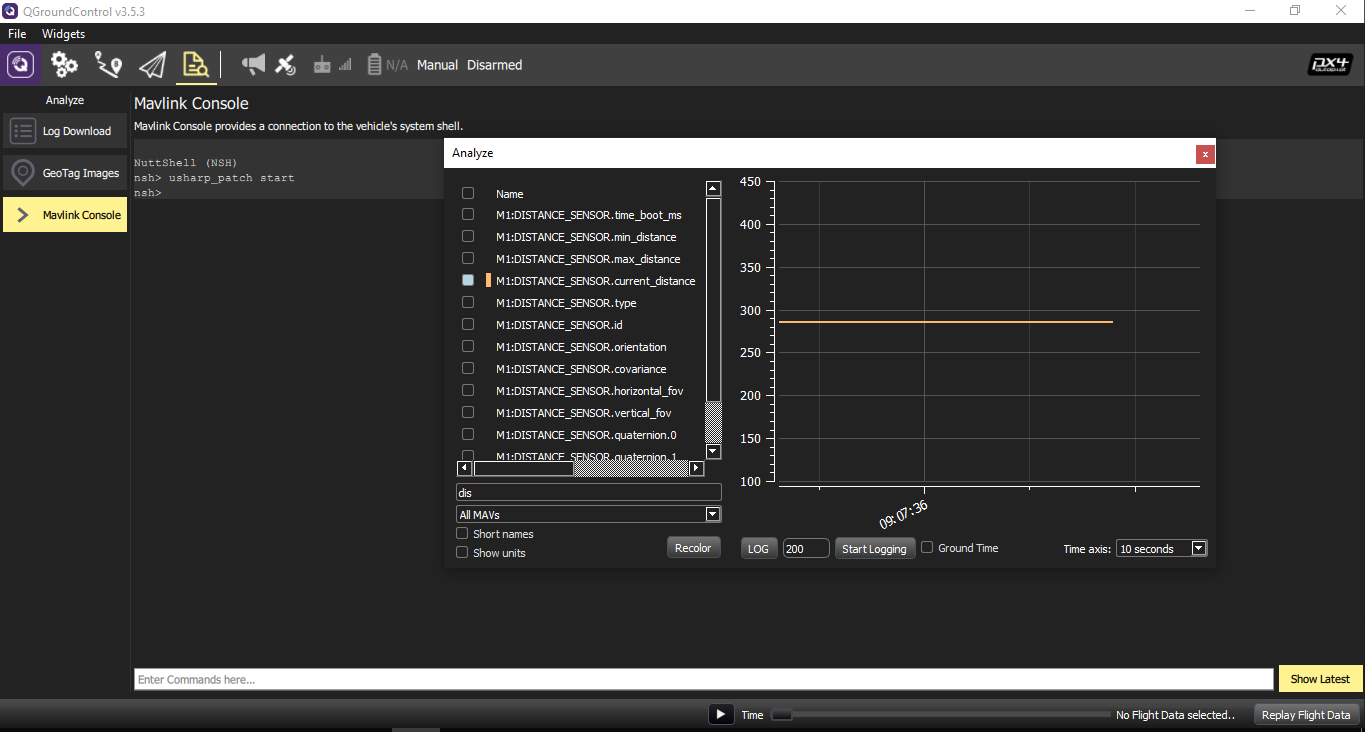
ı have a sensor called usharp patch from aerotenna like ulanding radar distance sensor ı am reading data when ı write "usharp_patch start" to the mavlink console and watch the data with analyze section. So ı am wondering can ı send that "usharp_start" message to mavlink console when ı power the pixhawk?
Well, maybe changing flight mode features will do that but ı dont know how to change flight mode features either.
btw sensor's driver is uploaded to the pixhawk but ı dont know who did that ı'll publish the driver as soon as find the driver file
 bthnekn
bthnekn
All 4 comments
Do I understand correctly that you just want to do a nsh command on startup to start a sensor?
If you're already compiling your own code, you can add the command to the startup here:
https://github.com/PX4/Firmware/blob/master/ROMFS/px4fmu_common/init.d/rcS
 julianoes
on 24 Jul 2019
julianoes
on 24 Jul 2019
Yes just try to add a new command. Normally I write "usharp_patch start" command manually via mavlink console in qground control.What I want is actually this starting process of the sensor triggered with startup like the compass or gyro (sensor dont need calibration btw)
Thank a lot for your help ı will examine your link
bthnekn
on 25 Jul 2019
I'm closing this as a solution has been posted, please use discuss.px4.io if you need further help.
 mhkabir
on 25 Jul 2019
mhkabir
on 25 Jul 2019
mhkabir
on 25 Jul 2019
mhkabir
on 25 Jul 2019
Related issues
julianoes
·
3Comments
 dk7xe
·
3Comments
dk7xe
·
3Comments
 alexcherpi
·
4Comments
alexcherpi
·
4Comments
 CarlOlsson
·
5Comments
CarlOlsson
·
5Comments
 JacobCrabill
·
4Comments
JacobCrabill
·
4Comments