Inav: Version 2.2.0 and 2.2.1 POSHOLD Skyrocket
Current Behavior
Enabling POSHOLD while descending causes QUAD to skyrocket with motors at full throttle until NAV mode is disabled.
Steps to Reproduce
- Descend at a fairly fast rate
- Enable 3D POSHOLD mode
- Occurs every time and easy to reproduce
Expected behavior
QUAD should stop and stabilize at its current position.
Suggested solution(s)
Problem is caused by the new acceleration weight that was added to the navigation_pos_estimator in version 2.2.0. As a temporary solution, I disabled the accWeight calculation in the estimationPredict function in a custom build.
 KenImhof
KenImhof
All 19 comments
Issue-Label Bot is automatically applying the label BUG to this issue, with a confidence of 0.72. Please mark this comment with :thumbsup: or :thumbsdown: to give our bot feedback!
Links: app homepage, dashboard and code for this bot.
![issue-label-bot[bot] picture](https://avatars2.githubusercontent.com/in/27079?v=4&s=40) issue-label-bot[bot]
on 10 Jul 2019
issue-label-bot[bot]
on 10 Jul 2019
Would be nice if you provide more details and blackbox
 giacomo892
on 10 Jul 2019
giacomo892
on 10 Jul 2019
Blackbox log i attached.
LOG00007.zip
Link to video:
https://www.youtube.com/watch?v=uEpvAewQ7WE&feature=youtu.be
KenImhof
on 10 Jul 2019
@KenImhof can you try reverting this https://github.com/iNavFlight/inav/pull/4448 without any other modification and test again?
giacomo892
on 11 Jul 2019
I just commented out the accWeight as listed below and my 2.2.1 quad is back-up and working without the skyrocket behavior.
static void estimationPredict(estimationContext_t * ctx)
{
const float accWeight = navGetAccelerometerWeight();
/* Prediction step: Z-axis */
if ((ctx->newFlags & EST_Z_VALID)) {
posEstimator.est.pos.z += posEstimator.est.vel.z * ctx->dt;
posEstimator.est.pos.z += posEstimator.imu.accelNEU.z * sq(ctx->dt) / 2.0f; // * accWeight; KBI
posEstimator.est.vel.z += posEstimator.imu.accelNEU.z * ctx->dt; //* sq(accWeight); KBI
}
/* Prediction step: XY-axis */
if ((ctx->newFlags & EST_XY_VALID)) {
// Predict based on known velocity
posEstimator.est.pos.x += posEstimator.est.vel.x * ctx->dt;
posEstimator.est.pos.y += posEstimator.est.vel.y * ctx->dt;
// If heading is valid, accelNEU is valid as well. Account for acceleration
if (navIsHeadingUsable() && navIsAccelerationUsable()) {
posEstimator.est.pos.x += posEstimator.imu.accelNEU.x * sq(ctx->dt) / 2.0f; //* accWeight; KBI
posEstimator.est.pos.y += posEstimator.imu.accelNEU.y * sq(ctx->dt) / 2.0f; //* accWeight; KBI
posEstimator.est.vel.x += posEstimator.imu.accelNEU.x * ctx->dt; //* sq(accWeight); KBI
posEstimator.est.vel.y += posEstimator.imu.accelNEU.y * ctx->dt; //* sq(accWeight); KBI
}
}
}
KenImhof
on 11 Jul 2019
Can you also provide config dump of a setup that skyrockets?
 digitalentity
on 11 Jul 2019
digitalentity
on 11 Jul 2019
Specifically, I'm interested in a value of inav_w_xyz_acc_p
digitalentity
on 11 Jul 2019
Listed below is the diff from several days ago. Since this dump, I have changed from DSHOT to MULTISHOT and enabled AIRMODE with the same results.
diff
version
INAV/OMNIBUSF4V3 2.2.1 Jul 3 2019 / 22:13:58 (a6d847482)
GCC-8.2.1 20181213 (release) [gcc-8-branch revision 267074]
resources
mixer
mmix 0 1.000 -1.000 1.000 -1.000
mmix 1 1.000 -1.000 -1.000 1.000
mmix 2 1.000 1.000 1.000 1.000
mmix 3 1.000 1.000 -1.000 -1.000
servo mix
servo
logic
feature
feature -VBAT
feature -TX_PROF_SEL
feature -BLACKBOX
feature -AIRMODE
feature -OSD
feature GPS
feature PWM_OUTPUT_ENABLE
beeper
map
map TAER
serial
serial 0 64 115200 115200 0 115200
serial 5 2 115200 115200 0 115200
led
color
mode_color
aux
aux 0 0 1 1025 1275
aux 1 3 2 1400 1900
aux 2 9 2 1400 1900
aux 3 8 0 1875 2100
aux 4 21 3 1775 2100
aux 5 30 2 1400 1600
aux 6 31 2 1750 1950
adjrange
rxrange
temp_sensor
wp
wp 0 invalid
osd_layout
master
set looptime = 250
set gyro_hardware_lpf = 256HZ
set acc_hardware = MPU6000
set acczero_x = 125
set acczero_y = 1
set acczero_z = 94
set accgain_x = 4062
set accgain_y = 4115
set accgain_z = 3994
set align_mag = CW270FLIP
set mag_hardware = HMC5883
set magzero_x = 75
set magzero_y = -60
set magzero_z = 28
set baro_hardware = BMP280
set pitot_hardware = NONE
set receiver_type = SERIAL
set serialrx_provider = SPEK2048
set motor_pwm_rate = 8000
set motor_pwm_protocol = DSHOT300
set failsafe_procedure = RTH
set model_preview_type = 3
set 3d_deadband_low = 1450
set 3d_deadband_high = 1550
set 3d_neutral = 1500
set nav_user_control_mode = CRUISE
set nav_manual_speed = 1500
set nav_landing_speed = 250
set nav_mc_bank_angle = 45
set nav_mc_hover_thr = 1400
set nav_fw_cruise_thr = 1000
set nav_fw_pitch2thr = 75
set nav_fw_loiter_radius = 600
profile
profile 1
set mc_p_pitch = 30
set mc_i_pitch = 25
set mc_p_roll = 30
set mc_i_roll = 25
set nav_mc_vel_xy_d = 200
set roll_rate = 60
set pitch_rate = 60
set yaw_rate = 60
battery_profile
battery_profile 1
set vbat_max_cell_voltage = 430
set vbat_warning_cell_voltage = 370
KenImhof
on 12 Jul 2019
@KenImhof Is 1400 the correct value for this quad for hover throttle? Seems very generic. I typically calibrate this to an exact number like 1235 or whatever.
 teckel12
on 12 Jul 2019
teckel12
on 12 Jul 2019
@teckel12 this is 10-inch 3d quad with 8-inch props and the correct value is around 1650. I just did a quick non-3d setup to duplicate the problem using the standard 2.2.1 code. I just set it to 1400 to get it close for just one flight to verify the problem is with the standard build. This quad is now back to the 3d setup with a custom build with the accWeight removed and is now flying great using the base 2.2.1 code.
KenImhof
on 12 Jul 2019
@KenImhof Perfect, just checking.
teckel12
on 12 Jul 2019
@KenImhof can you reproduce the issue and record BB log with set debug = VIBE ?
digitalentity
on 12 Jul 2019
Sure, I will set everything back to stock values/version and should have it for you shortly.
KenImhof
on 12 Jul 2019
Awesome!
digitalentity
on 12 Jul 2019
@digitalentity attached are the log and diff files. The skyrocket occurred on the 2nd attempt in the log as it worked correct the first time. Please let me know if you would like me to try anything else and I will keep this setup available
DIFF-20190712_112507.zip
LOG00007.zip
for testing.
Thanks,
KenImhof
on 12 Jul 2019
A classic case of accelerometer resonance:
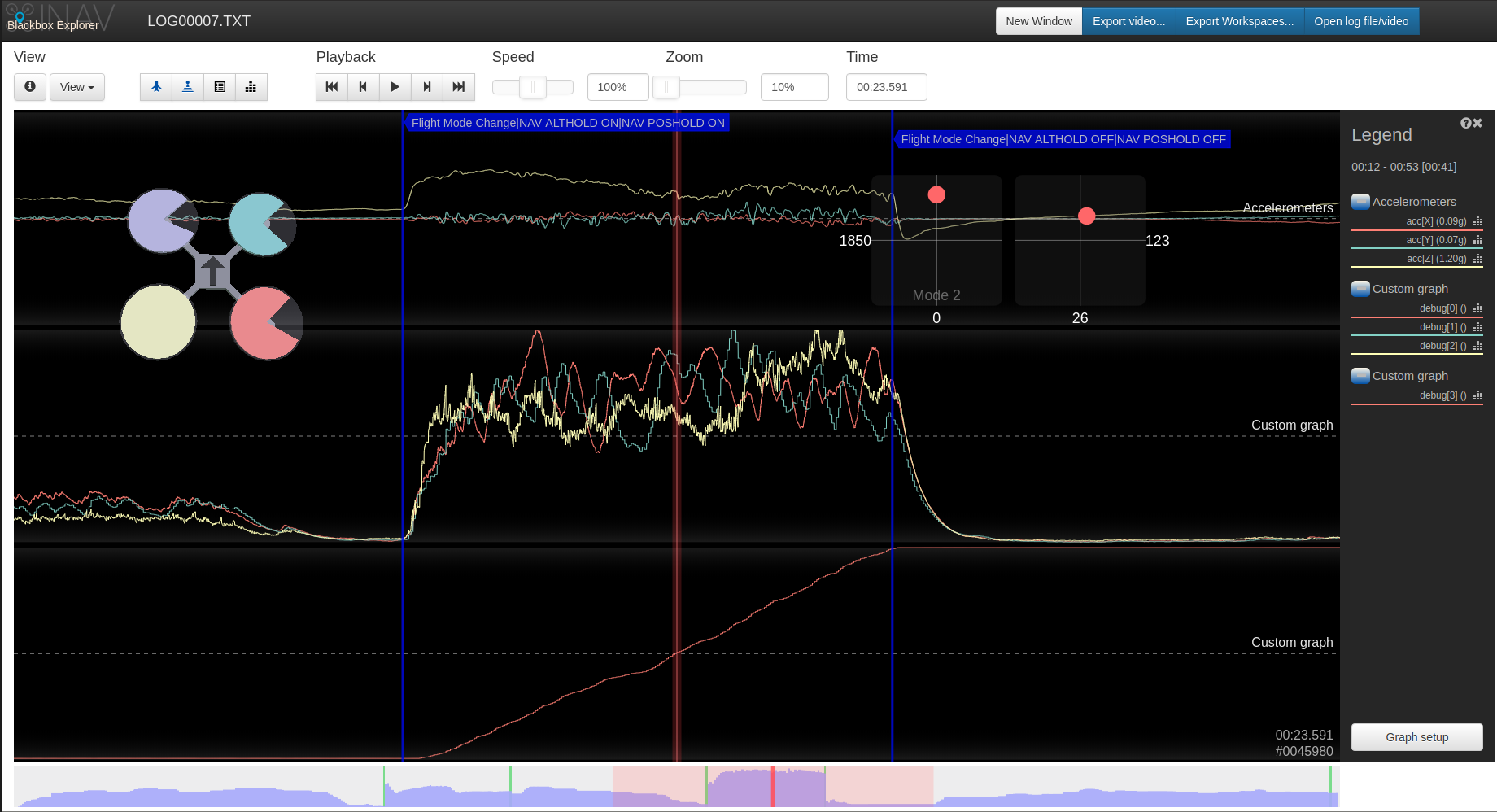
Accelerometer dynamic weigh safeguards significantly reduced accelerometer weight in height calculation, but not enough to entirely prevent the unexpected behavior. For your flights without the issue - you got lucky :smile:
PR https://github.com/iNavFlight/inav/pull/4930 will give insight into accelerometer issues via OSD message.
Another action item for us - look into increasing barometer weight to allow barometer-only flight without accelerometer assistance.
digitalentity
on 12 Jul 2019
Tested out a new 12" build some days ago. Kakute F7 board with 2.2.1. Fitted a TF Mini rangefinder. Had modes set to position (i) Alt Hold + Surface. (ii) Alt Hold + Pos Hold (Surface off).
Craft took off and mode position (i) engaged at about 2m. Altitude increased to about 4m. Then engaged mode position (ii) and reduced throttle to reduce height. Craft shot upwards and tried to flip. Immediately disengaged Nav modes but craft crash landed before recovery possible. Some damage done. I put this error down to possible hardware issue until I saw this issue reported from @KenImhof. Have repaired craft without the TFmini installed and set single Nav mode of Pos Hold.
Can I be confident please that 2.2.1 on Kakute F7 is unrelated to the problem and all Nav modes will work correctly?
 neilm06
on 13 Jul 2019
neilm06
on 13 Jul 2019
@neilm06 we can't debug the issue without blackbox log. Flipping in the air (aka "roll of death") is generally a hardware issue, but it's impossible to tell without blackbox. Poshold, althold and surface mode are verified to be working in 2.2.1
digitalentity
on 13 Jul 2019
Thanks. I did have a black box log that showed throttle went to max for few seconds after pos hold engaged. Unfortunately don’t have that log anymore..... so doesn’t really help matters. I did have to replace 4 in 1 esc after crash. Seemed a bit fragile to me. It is a newish airbot furling32 airport 50A which is very thin. I will give 2.2.1 a go .... over some long grass.
Sent from my iPhone
On 13 Jul 2019, at 10:38, Konstantin Sharlaimov notifications@github.com wrote:
@neilm06 we can't debug the issue without blackbox log. Flipping in the air (aka "roll of death") is generally a hardware issue, but it's impossible to tell without blackbox. Poshold, althold and surface mode are verified to be working in 2.2.1
—
You are receiving this because you were mentioned.
Reply to this email directly, view it on GitHub, or mute the thread.
neilm06
on 13 Jul 2019
Related issues
 dankvwguy
·
4Comments
dankvwguy
·
4Comments
 tadamox
·
3Comments
tadamox
·
3Comments
 Jetrell
·
4Comments
Jetrell
·
4Comments
 ghost
·
4Comments
ghost
·
4Comments
 Painless360
·
4Comments
Painless360
·
4Comments
Most helpful comment
Issue-Label Bot is automatically applying the label
BUGto this issue, with a confidence of 0.72. Please mark this comment with :thumbsup: or :thumbsdown: to give our bot feedback!Links: app homepage, dashboard and code for this bot.