Carla: How to get the distance of the vehicle from the center of the lane and the angle between the vehicle orientation and the road tangent
Thanks for Carla team hard work.
I want to train a reinforcement learning agent based on CARLA.
How to get the distance of the vehicle from the center of the lane and the angle between the vehicle orientation and the road tangent?
 HubFire
HubFire
All 6 comments
Hi @HubFire.
Using 0.9.1 you are able to get a carla.Waypoint (based on the OpenDrive) using:
waypoint = client.get_world().get_map().get_waypoint(carla.Location, project_to_road=True)
As you have specified project_to_road=True, this waypoint will be on the center of the (nearest) road.
A carla.Waypoint have a carla.Transform that have a carla.Location and a carla.Rotation.
You can use this transform to get the distance of the center of the road and the orientation difference.
Cheers!
 marcgpuig
on 26 Nov 2018
marcgpuig
on 26 Nov 2018
@marcgpuig I wanted to know more about the Waypoints. Here are my doubts on the matter:
(I do not expect direct answers to all of them, but it would be great if you could direct me to the relevant document / literature where I could find the answers).
How are waypoints represented in the Map.
When you call
get_waypoint(Location):- Is the returned waypoint the nearest waypoint (from a list of waypoints in the map) to the Location?
or - Is it the transform of the nearest waypoint (point normal to the nearest road network) ?
- Is the returned waypoint the nearest waypoint (from a list of waypoints in the map) to the Location?
How do I compute road curvature?
- My present idea is to get the next few waypoints, fit a cubic spline over these points and get the curvature.
- But, If you can direct me to literature regarding the road network and the waypoints used, I think there might be a better way to go about it.
When we call
map.generate_waypoints(distance):- Why aren't the waypoints generated near the vicinity of the vehicle / spectator. How to make that happen?
When we call
waypoint.next(distance):- Is the new waypoint precisely that euclidean distance away from the present point or is it the distance along the route.
 YashBansod
on 6 Dec 2018
YashBansod
on 6 Dec 2018
Hi @YashBansod.
Regarding your questions:
How are waypoints represented in the Map
By its geometry that can be lines and arcs.
When you call get_waypoint(Location)...
get_waypoint(Location): Returns a Waypoint centered on the nearest lane.
How do I compute road curvature?
You can't currently, but we are planning to provide the road geometry on our Python API.
When we call map.generate_waypoints(distance)
It generates a graph of waypoints with approximately the provided distance between them.
When we call waypoint.next(distance)
Is it the distance along the route.
Hope it helps! We will add this to our docs soon :)
marcgpuig
on 10 Dec 2018
This issue has been automatically marked as stale because it has not had recent activity. It will be closed if no further activity occurs. Thank you for your contributions.
![stale[bot] picture](https://avatars.githubusercontent.com/in/1724?v=4&s=40) stale[bot]
on 8 Feb 2019
stale[bot]
on 8 Feb 2019
@YashBansod Did you finally get through with the calculating the curvature ? If yes then maybe you could pass on the knowledge :)
 aakashsehgal
on 5 Sep 2019
aakashsehgal
on 5 Sep 2019
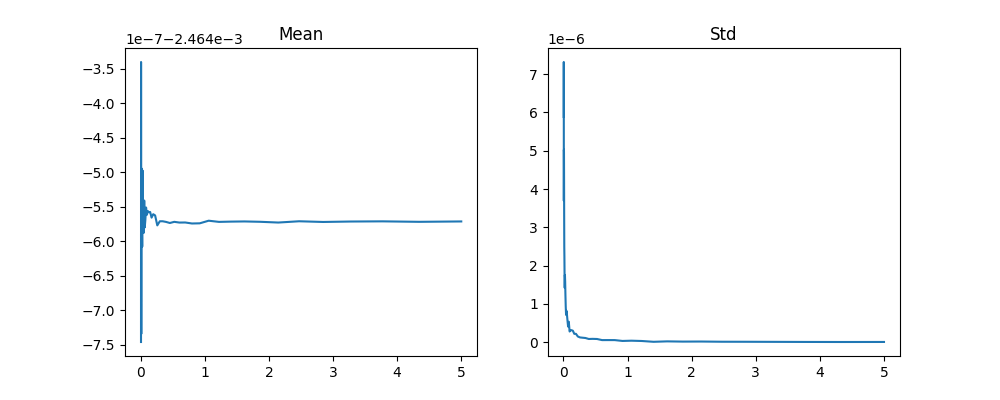
I use this approximation method.
def calcu_c_1(host_waypoint, route_distance):
previous_waypoint = host_waypoint.previous(route_distance)[0]
next_waypoint = host_waypoint.next(route_distance)[0]
_transform = next_waypoint.transform
_location, _rotation = _transform.location, _transform.rotation
x1, y1 = _location.x, _location.y
yaw1 = _rotation.yaw
_transform = previous_waypoint.transform
_location, _rotation = _transform.location, _transform.rotation
x2, y2 = _location.x, _location.y
yaw2 = _rotation.yaw
c = 2*sin(radians((yaw1-yaw2)/2)) / sqrt((x1-x2)**2 + (y1-y2)**2)
return c
std and mean with different route_distance.
 kannidekan
on 20 Dec 2020
kannidekan
on 20 Dec 2020
Related issues
 qixiaoshuai0120
·
3Comments
qixiaoshuai0120
·
3Comments
 kk2491
·
3Comments
kk2491
·
3Comments
 mallela
·
3Comments
mallela
·
3Comments
 hc167
·
4Comments
hc167
·
4Comments
 syinari0123
·
3Comments
syinari0123
·
3Comments
Most helpful comment
Hi @YashBansod.
Regarding your questions:
By its geometry that can be lines and arcs.
get_waypoint(Location): Returns a Waypoint centered on the nearest lane.You can't currently, but we are planning to provide the road geometry on our Python API.
It generates a graph of waypoints with approximately the provided distance between them.
Is it the distance along the route.
Hope it helps! We will add this to our docs soon :)