Apollo: [Question]obstacles recognise issue by cloud points of perception module
Hi,
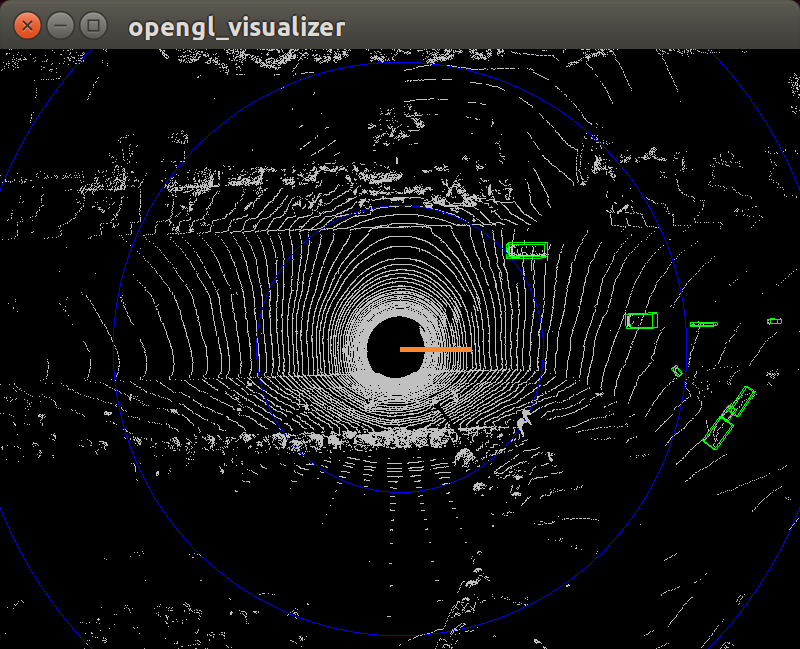
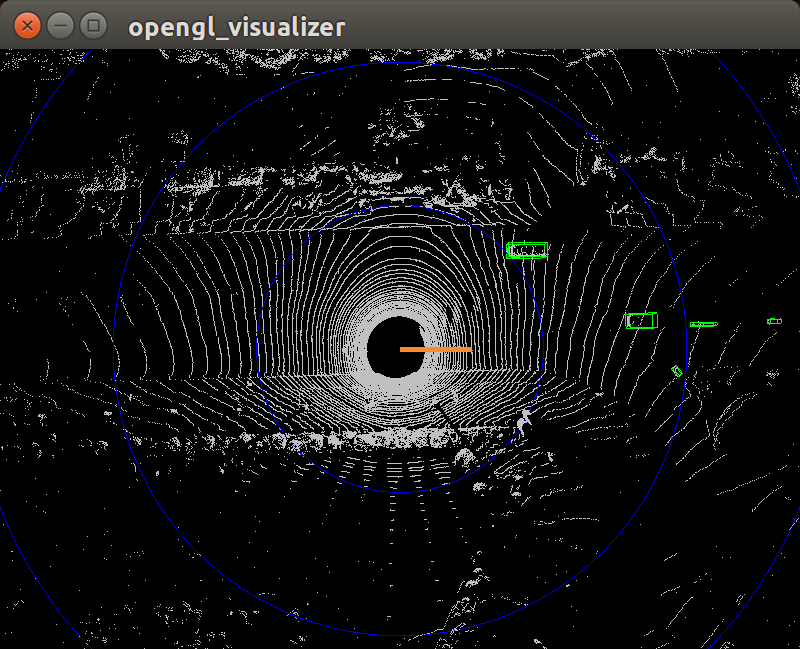
I added 1000 random points (outside ROI) into a pcd and the offline perception tool miss 3 obstacles in front of the vehicle. Is the algorithm or model behind the obstacle recognition by cloud points vulnerable to noise attack (points outside ROI)? My apollo code is checked out on the Jan 31, 2018.
This is original pcd.
This is pcd with 1000 random noise points ouside ROI
pose.zip
Position in sunnyvale_loop map
Regards,
Liqun Sun
 chucklqsun
chucklqsun
>All comments
thanks for the post. since cnn seg is deep learning trained, it might happen if you add noise point into the data itself. in practise, there could be multiple pipeline doing segmentation based on traditional method as well as deep learning method. Also, for cases like that, models can be fine tuned using data augmentation.
 weidezhang
on 20 Mar 2018
weidezhang
on 20 Mar 2018
Related issues
 lql7595
·
3Comments
lql7595
·
3Comments
 BenBaek
·
3Comments
BenBaek
·
3Comments
 lyletbjohnson
·
3Comments
lyletbjohnson
·
3Comments
 lesun90
·
3Comments
lesun90
·
3Comments
 maziqiqi
·
3Comments
maziqiqi
·
3Comments
Most helpful comment
thanks for the post. since cnn seg is deep learning trained, it might happen if you add noise point into the data itself. in practise, there could be multiple pipeline doing segmentation based on traditional method as well as deep learning method. Also, for cases like that, models can be fine tuned using data augmentation.