is the ll40ls compatible with the posix platform (rpi3) because when I compile I get error about (nuttx/clock.h and nuttx/wqueue.h).
 belaidH
belaidH
All 15 comments
You'll need to go through and fix those issues. Remove the nuttx headers first, then readd generic headers as needed.
 dagar
on 30 Dec 2017
dagar
on 30 Dec 2017
Or in other words: It is reasonably easy and a pull request would be appreciated.
 LorenzMeier
on 30 Dec 2017
LorenzMeier
on 30 Dec 2017
So I just have to remove the headers ? because after that several problems concerning the variable or function 'work' appear .
belaidH
on 30 Dec 2017
@belaidH yes remove those headers, and in that case add #include <px4_workqueue.h>.
dagar
on 31 Dec 2017
Okey thank you. I will try it
belaidH
on 31 Dec 2017
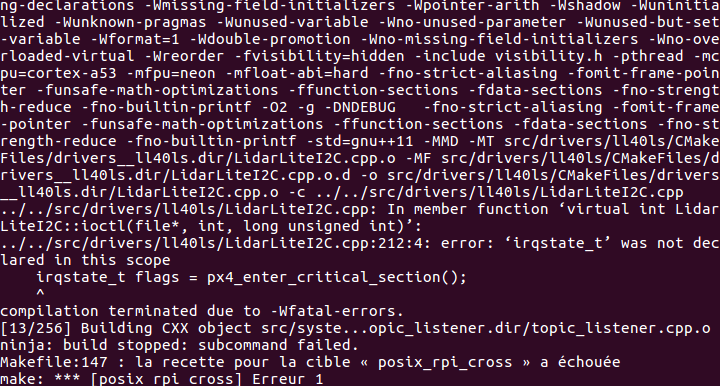
I think now it's okay for the workqueue. but I get an other error
about the irqstate_t on the LidarLiteI2C.cpp file (I would use the I2C of the rpi).
belaidH
on 1 Jan 2018
@belaidH you can replace the critical sections with ATOMIC_ENTER/ATOMIC_LEAVE.
On NuttX it's the same thing - https://github.com/PX4/Firmware/blob/master/src/drivers/device/nuttx/cdev_platform.hpp#L10
On other platforms it's a lock - https://github.com/PX4/Firmware/blob/master/src/drivers/device/posix/cdev_platform.hpp#L6
dagar
on 1 Jan 2018
@dagar thank you. after some tries it's compiled. Is there manip to start the ll40ls after launching the ./px4 because I don't see his topic when I use the "uorb top" command.
belaidH
on 1 Jan 2018
Does it work if you start it manually ll40ls start?
Once you're sure it's working you could add it to the raspberry pi configs here. https://github.com/PX4/Firmware/tree/master/posix-configs/rpi
dagar
on 1 Jan 2018
@dagar when I try this there is an error "Error opening fd".
but I have doing changed before on LidarLiteI2C.cpp, otherwise generate errors "no matchingfunction" at compile time.
case SENSORIOCGQUEUEDEPTH:
return _reports->size();
default: {
int result = LidarLite::ioctl(filp, cmd, arg); // to int result=LidarLiteI2C::ioctl(flip,cmd,arg);
if (result == -EINVAL) {
result = I2C::ioctl(filp, cmd, arg); // to result= LidarLiteI2C::ioctl(flip,cmd,arg;
}
return result;
}
}
}
belaidH
on 2 Jan 2018
If you open a pull request I can review and cross test. The I2C might be wrong for the raspberrypi as well.
On Linux the i2c buses map to /dev/i2c-X.
dagar
on 2 Jan 2018
@dagar okey, this is my pull requests https://github.com/belaidH/Firmware/pulls
belaidH
on 2 Jan 2018
Can you open as a pull request against the main PX4 Firmware repository? https://github.com/PX4/Firmware
dagar
on 4 Jan 2018
@dagar yes, I did it. https://github.com/PX4/Firmware/pull/8579
belaidH
on 4 Jan 2018
Done!
dagar
on 22 Jan 2018
Related issues
 dk7xe
·
3Comments
dk7xe
·
3Comments
 kainism
·
4Comments
kainism
·
4Comments
 JacobCrabill
·
4Comments
JacobCrabill
·
4Comments
 lgh5054
·
4Comments
lgh5054
·
4Comments
 prothen
·
5Comments
prothen
·
5Comments