Open3d: rotated numpy array cannot be converted back into open3d.PointCloud
The Issue
I am currently loading in the standard ply bunny as an open3d.PointCloud. Then I convert this to a numpy array using open3d's builtin method described in the documentation. Then I rotate the numpy array 90 degrees using the built in numpy method np.rot90. After this step, when I try to convert back to an open3d.PointCloud, it fails with a runtime error
To Reproduce
Here is the code that reproduces the problem, I will even attach the bunny.ply file I'm using (NOTE: they don't accept PLY files so I uploaded it in txt form, should be able to just change the filename extension back to ply)
import os
import open3d
import numpy as np
# load in bunny and rotate it 90 deg
input_file = os.path.join('data', 'bunny', 'bunny.ply')
bny = open3d.read_point_cloud(input_file)
bnynp = np.asarray(bny.points)
bny_rtd = np.rot90(bnynp)
# create new pointcloud to load out rotated bunny into
new_bny = open3d.PointCloud()
new_bny.points = open3d.Vector3dVector(bny_rtd)
---------------------------------------------------------------------------
RuntimeError Traceback (most recent call last)
<ipython-input-16-cd011cae2d61> in <module>
----> 1 new_bny.points = open3d.Vector3dVector(bny_rtd)
RuntimeError:
Environment
- OS: Ubuntu 16.04
- Python version: 3.5.2
- Open3D version: 0.5.0.0
- Is this remote workstation?: no
- How did you install Open3D?: pip
 barlaensdoonn
barlaensdoonn
All 5 comments
same things happens if I use scipy.ndimage.rotate instead of np.rot90
barlaensdoonn
on 1 Apr 2019
After rotation, the nump array might not be of shape (n, 3).
open3d.Vector3dVector()'s input should have shape (n, 3) (see docs).
If you're trying to rotate the point cloud, try open3d.geometry.PointCloud.transform() (see docs), i.e.
new_bny.transform(rotation_matrix)
 yxlao
on 1 Apr 2019
yxlao
on 1 Apr 2019
You were right that those previous functions were outputting the wrong shape for converting back into a open3d.PointCloud. I have read through the documentation on open3d.geometry.PointCloud.transform() and it seems to be what I'm looking for, but can you explain a but more what the [4x4] transformation matrix looks like?
Thanks you for you time, very exciting project and to see it integrated with PointNet++
barlaensdoonn
on 2 Apr 2019
See http://mathworld.wolfram.com/RotationMatrix.html
In Open3D, pad the 3x3 matrix to 4x4 matrix by inserting a 1 at the last diaganal position. For example, to rotate along x-axis, where (x', y', z') is the transformed point.
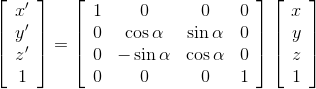
You may also refer to the implementation: https://github.com/IntelVCL/Open3D/blob/519c69333130c1b9c252227b43436089b9ba6ce1/src/Open3D/Geometry/PointCloud.cpp#L88-L101
yxlao
on 2 Apr 2019
thanks for you help and patience with this, I wlll close the issue and reopen if I have any other questions
barlaensdoonn
on 2 Apr 2019
Related issues
 tonghia
·
3Comments
tonghia
·
3Comments
 martinakos
·
4Comments
martinakos
·
4Comments
 marcel-bariou
·
3Comments
marcel-bariou
·
3Comments
 mike239x
·
3Comments
mike239x
·
3Comments
 lordlycastle
·
3Comments
lordlycastle
·
3Comments