Open3d: EstimateNormals not working for flat patches
It appears the EstimateNormals function does not work properly for completely flat patches, also somehow depending on the orientation.
To reproduce:
import numpy as np
import open3d
X,Y = np.mgrid[0:1:0.1,0:1:0.1]
X = X.flatten()
Y = Y.flatten()
pts = np.zeros((3, X.size))
pts[0] = X
pts[1] = Y
shape = open3d.PointCloud()
shape.points = open3d.Vector3dVector(pts.T)
shape.paint_uniform_color([0, 0.651, 0.929]) # blue
open3d.estimate_normals(shape, open3d.KDTreeSearchParamHybrid(radius = 0.5, max_nn = 30))
# show the shape
open3d.draw_geometries([shape])
If you write
pts[1] = X
pts[2] = Y
instead - it works as expected; if you use 0 and 1 or 0 and 2 as indices - it no longer works.
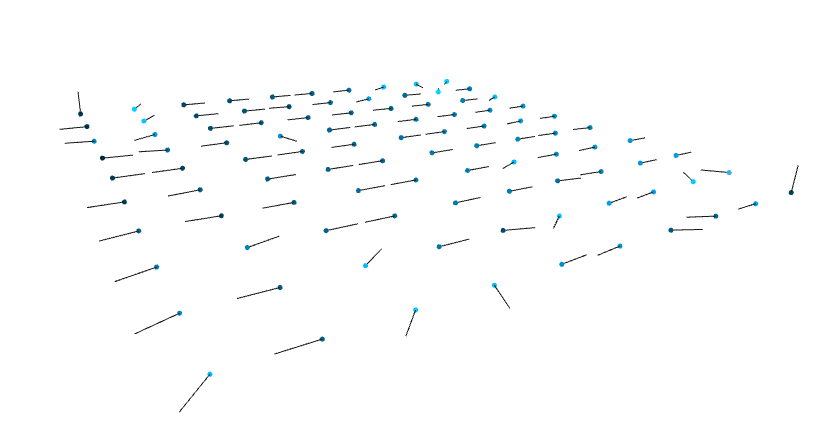
Expected:
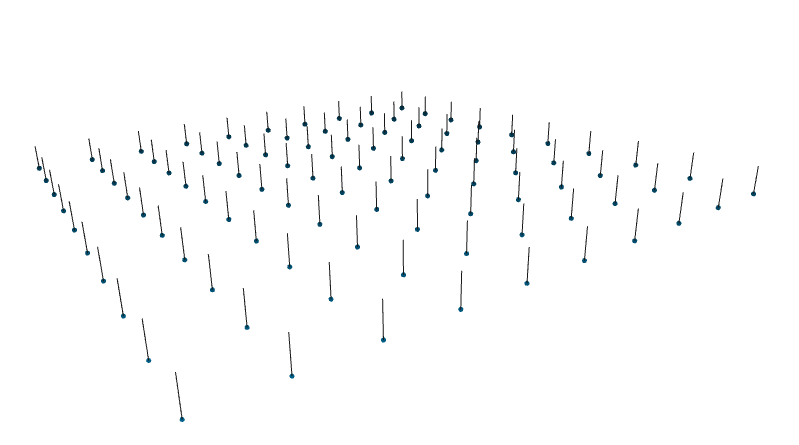
Got:
Environment (please complete the following information):
- OS: Ubuntu 18.04
- Python version: 3.6.7
- Open3D version: 0.5 release (also tested on the commit 6f493ef149f1360796709127312e1ff692bcf316)
- Is this remote workstation?: no
- How did you install Open3D?: pip for the release; build myself the newer version
possible bug
 mike239x
mike239x
All 3 comments
Good catch. Looks like a numerical issue of this function:
https://github.com/IntelVCL/Open3D/blob/377fc7d6a47ea47681c25a1e07a5383d62a612aa/src/Open3D/Geometry/EstimateNormals.cpp#L40
I will dig into it when I got time.
 qianyizh
on 27 Mar 2019
qianyizh
on 27 Mar 2019
👍1
Fun fact: adding minimal noise to the points fixes the problem.
mike239x
on 27 Mar 2019
Fixed in #1011
 griegler
on 13 Jun 2019
griegler
on 13 Jun 2019
❤1
Was this page helpful?
0 / 5 - 0 ratings
Related issues
 tonghia
·
3Comments
tonghia
·
3Comments
 orgicus
·
4Comments
orgicus
·
4Comments
 samarth-robo
·
3Comments
samarth-robo
·
3Comments
 mutp
·
4Comments
mutp
·
4Comments
 lordlycastle
·
3Comments
lordlycastle
·
3Comments