Betaflight: Target feature request: SPracing f7 dual: Ability to choose which gyro to use on each axis.
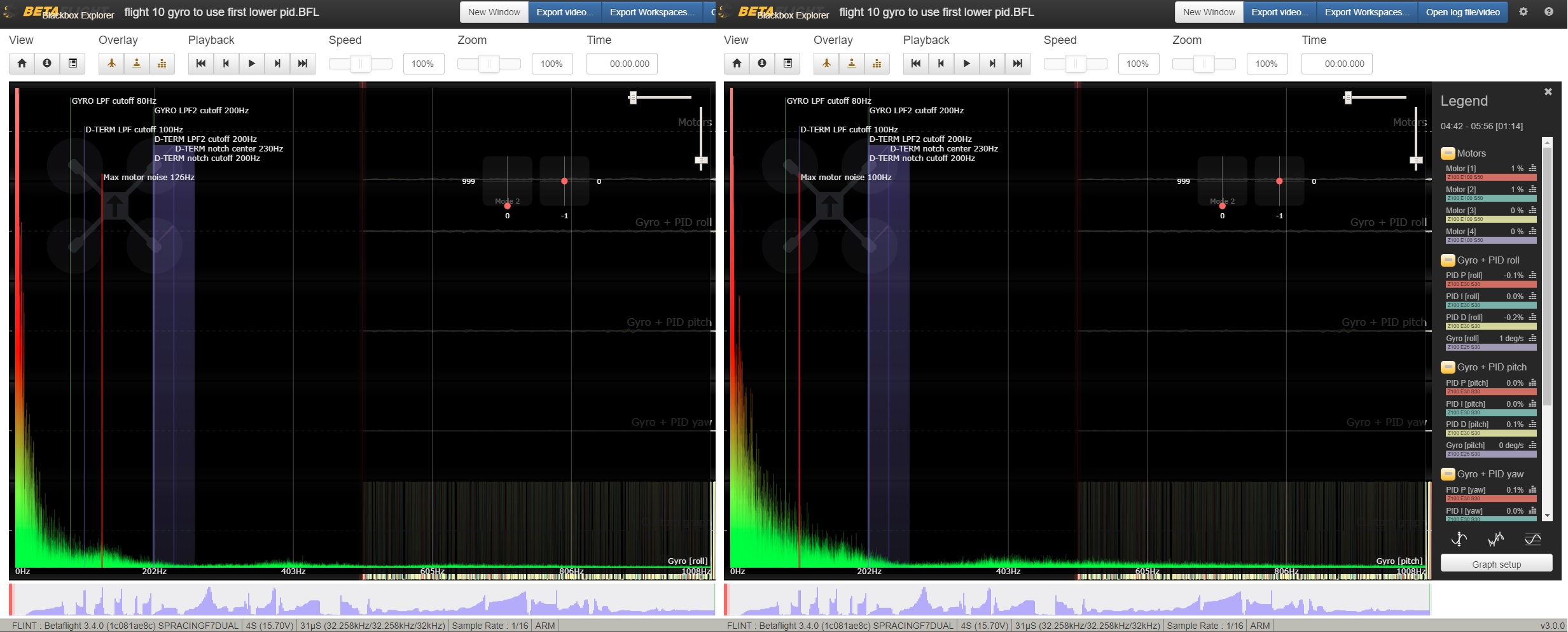
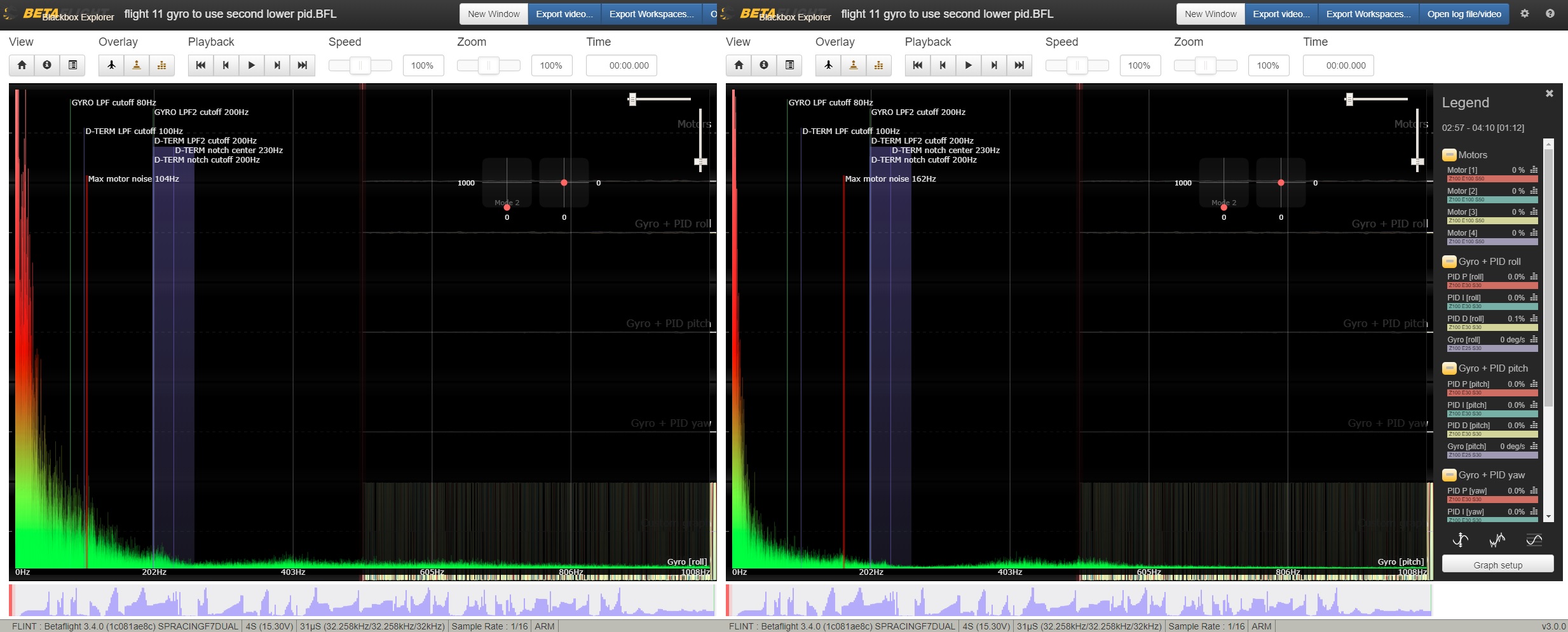
Based on testing I've just done, which gyro is used does affect noise seen on each axis. For first gyro, roll is much cleaner than pitch. For second gyro, pitch is much cleaner. So the ability to choose which gyro to use for each axis will give a better result than averaging the two gyros.
In this testing all used 32k/32k/multishot. No other changes other than gyro to use
gyro to use = first roll and pitch spectrum:
gyro to use = second roll and pitch spectrum:
Logs:
spracing f7 dual gyro first vs second.zip
I only pictured the "lower pids" logs but all of the logs exhibit the same effect. Also yaw axis has pretty much zero difference.
 flint723
flint723
All 3 comments
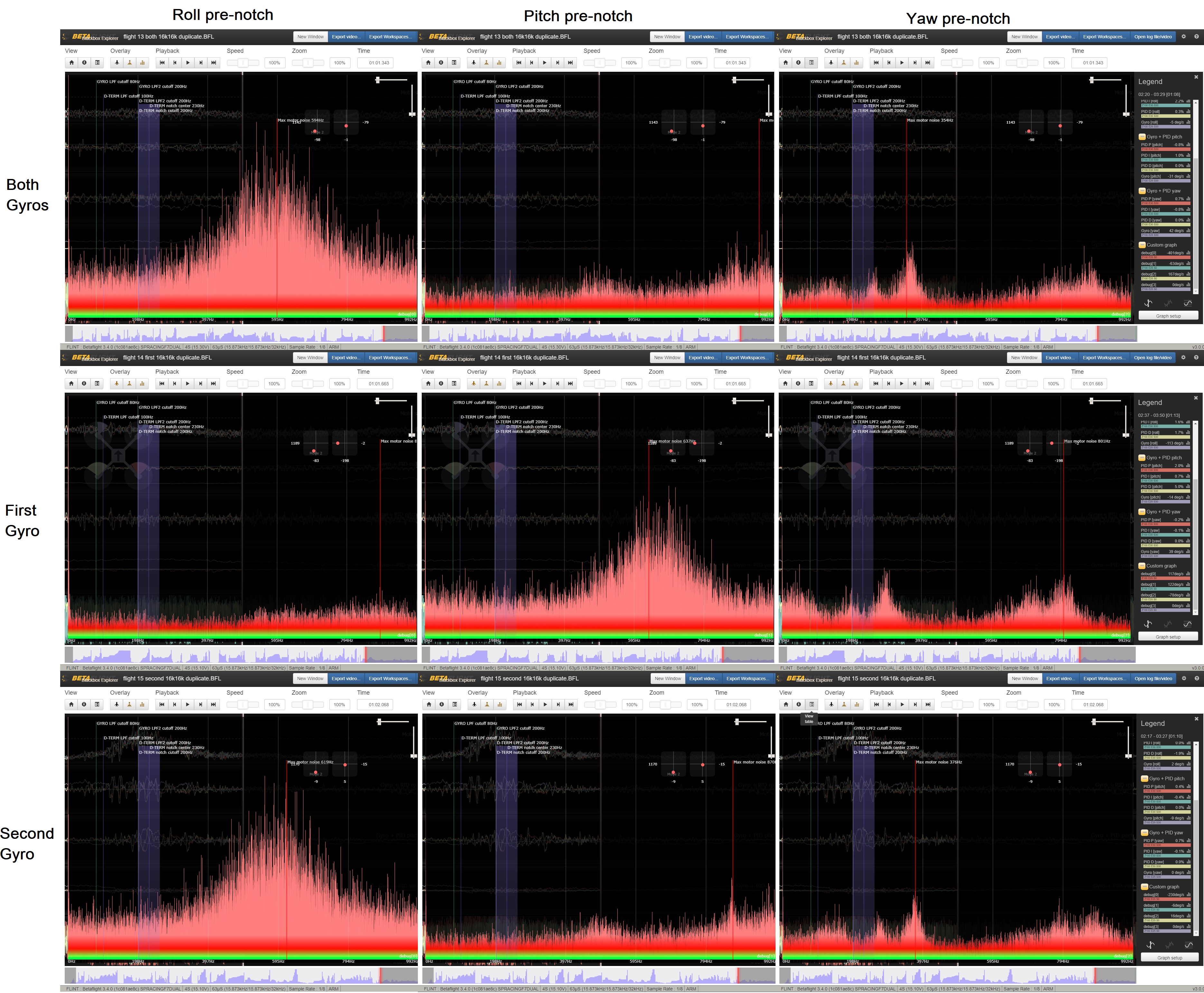
Got some better data. Using debug_mode = gyro_scaled, 16k/16k/multishot. No changes other than gyro_to_use
It is obvious from this image that gyro_scaled only records second gyro when gyro_to_use = both is selected, not the average.
But this clearly illustrates that (at least in my case) averaging the gyros is not ideal, vs taking the cleaner gyro for each axis.
flint723
on 25 Jun 2018
Working on it 👍
 ghost
on 28 Jul 2018
ghost
on 28 Jul 2018
It can't record the average as there no average until all filtering is done.
 DieHertz
on 28 Jul 2018
DieHertz
on 28 Jul 2018
Related issues
 jj-uk
·
4Comments
jj-uk
·
4Comments
 prohelper
·
3Comments
prohelper
·
3Comments
 lukedempsey
·
4Comments
lukedempsey
·
4Comments
 Piece0fPaper
·
3Comments
Piece0fPaper
·
3Comments
 MastroDado
·
4Comments
MastroDado
·
4Comments
Most helpful comment
Got some better data. Using debug_mode = gyro_scaled, 16k/16k/multishot. No changes other than
gyro_to_useIt is obvious from this image that gyro_scaled only records
secondgyro whengyro_to_use = bothis selected, not the average.But this clearly illustrates that (at least in my case) averaging the gyros is not ideal, vs taking the cleaner gyro for each axis.
