Ardupilot: Preparing to add external SPI IMU for better flight
Hi guys, we have released a new external IMU consisting of ADI gyros and accelerometers. The flight experience has been improved. Also the control performance is better now. We are going to upload the source codes to APM for further support. As is known, the Pixhawk, Pixhawk 3 Pro and Pixhawk 4 all have onboard external SPI connector. The IMU is then applied to these platforms with sampling frequency of 1000Hz.
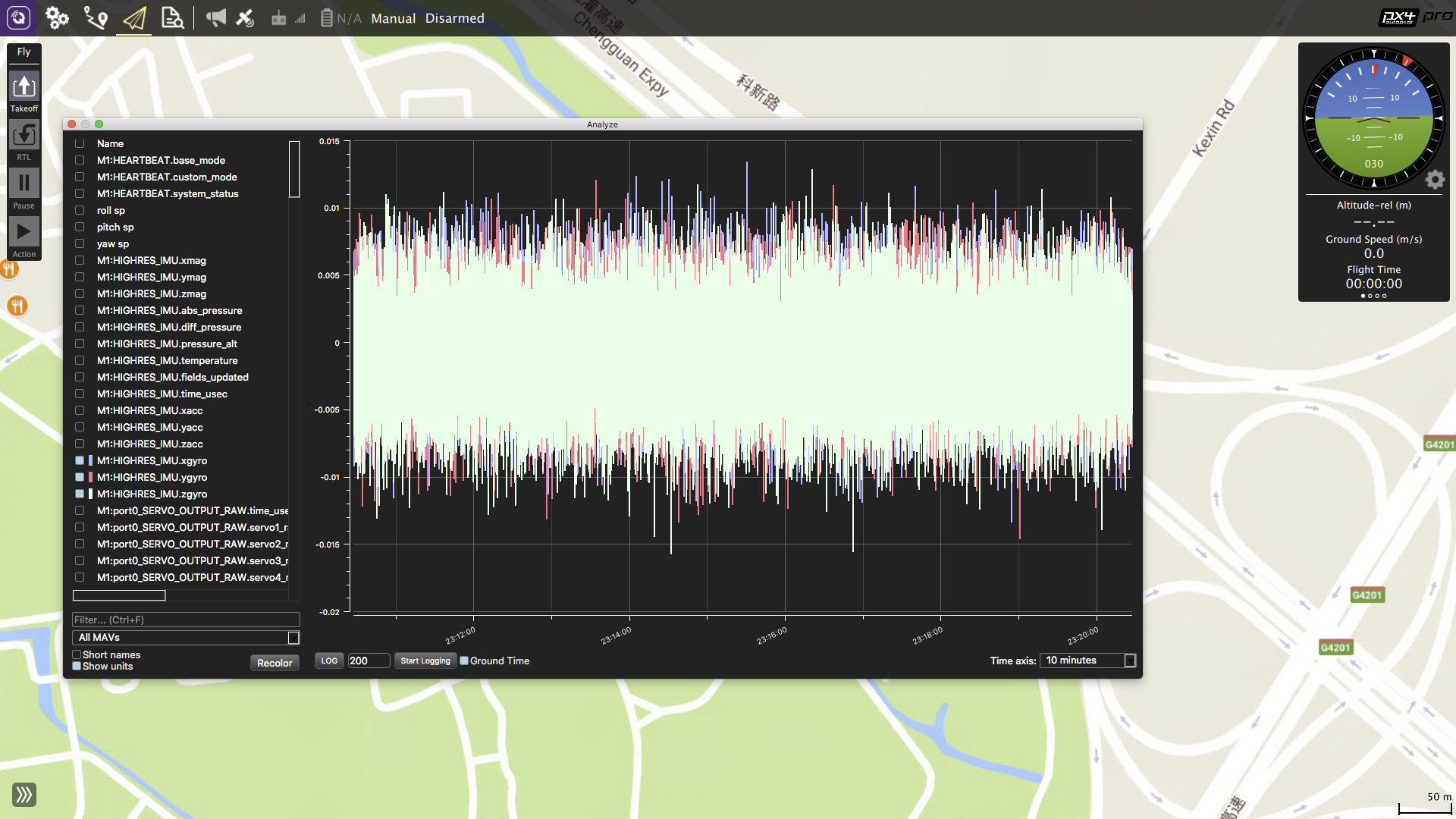
The following is a typical sampling via the PX4 with 3 ADXRS620 gyros
With the onboard MPU6000 and external IMU, two test flights have been conducted. For the first one, the MPU6000 is used for computing attitude. The control performances are shown as follows:
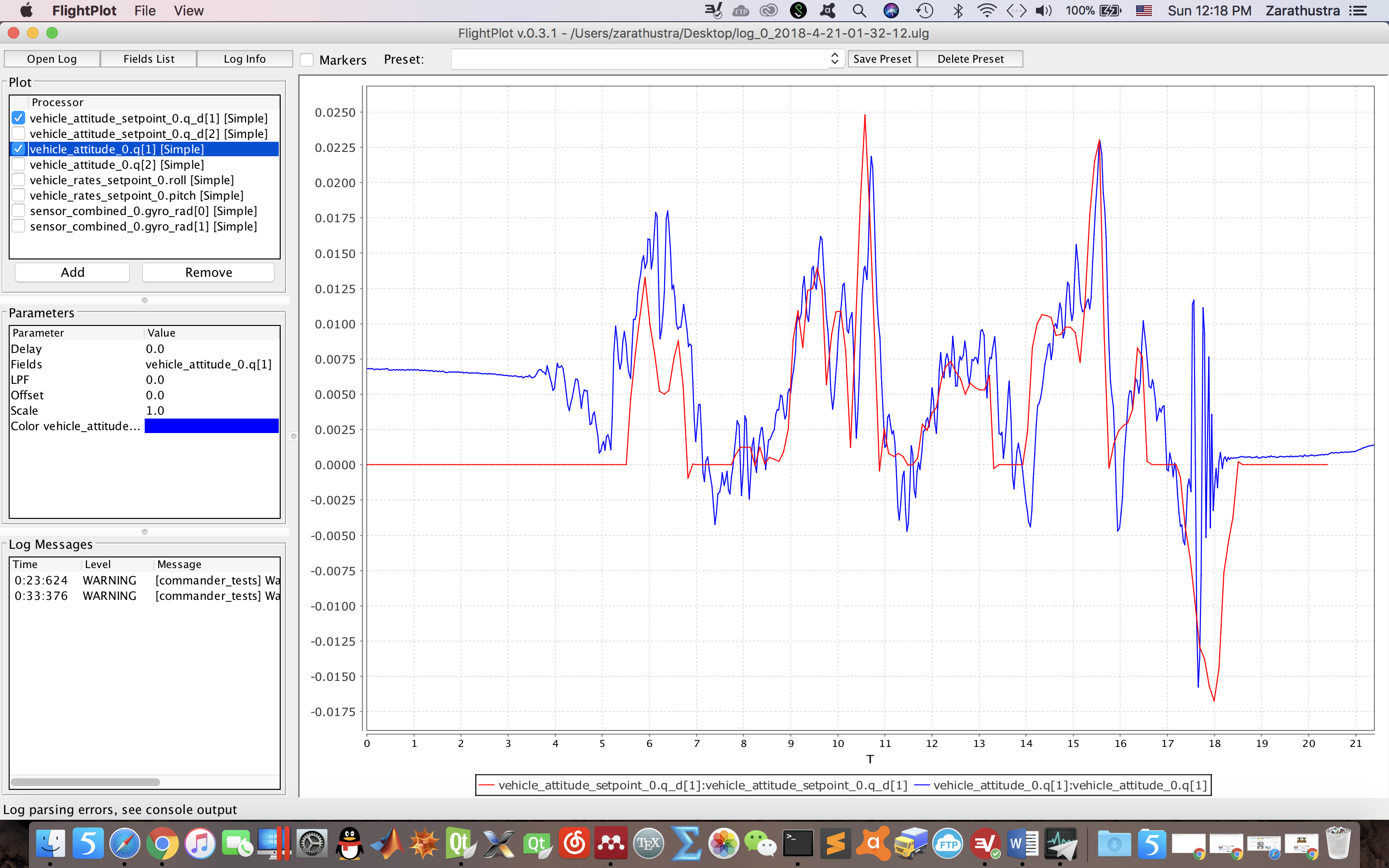

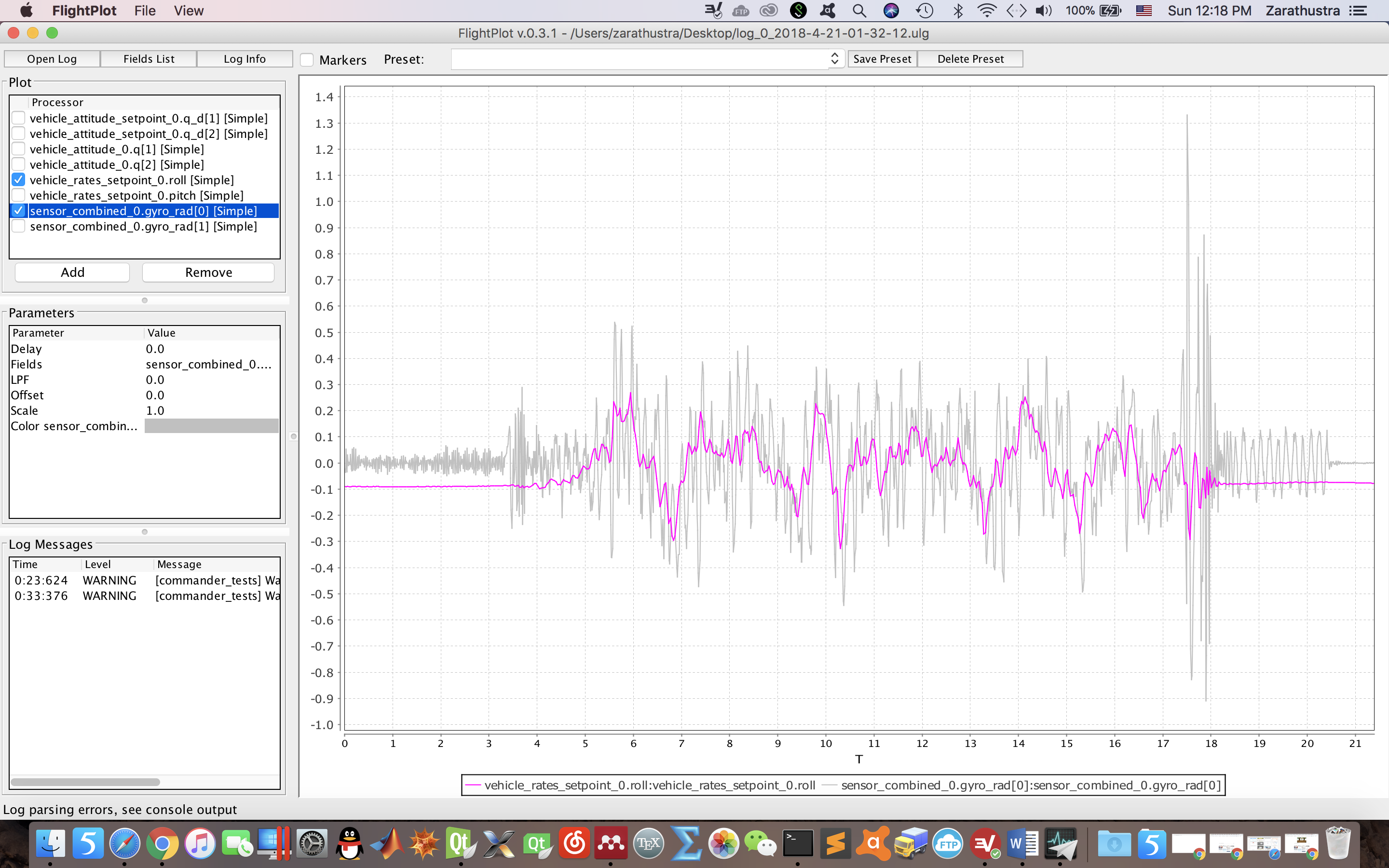
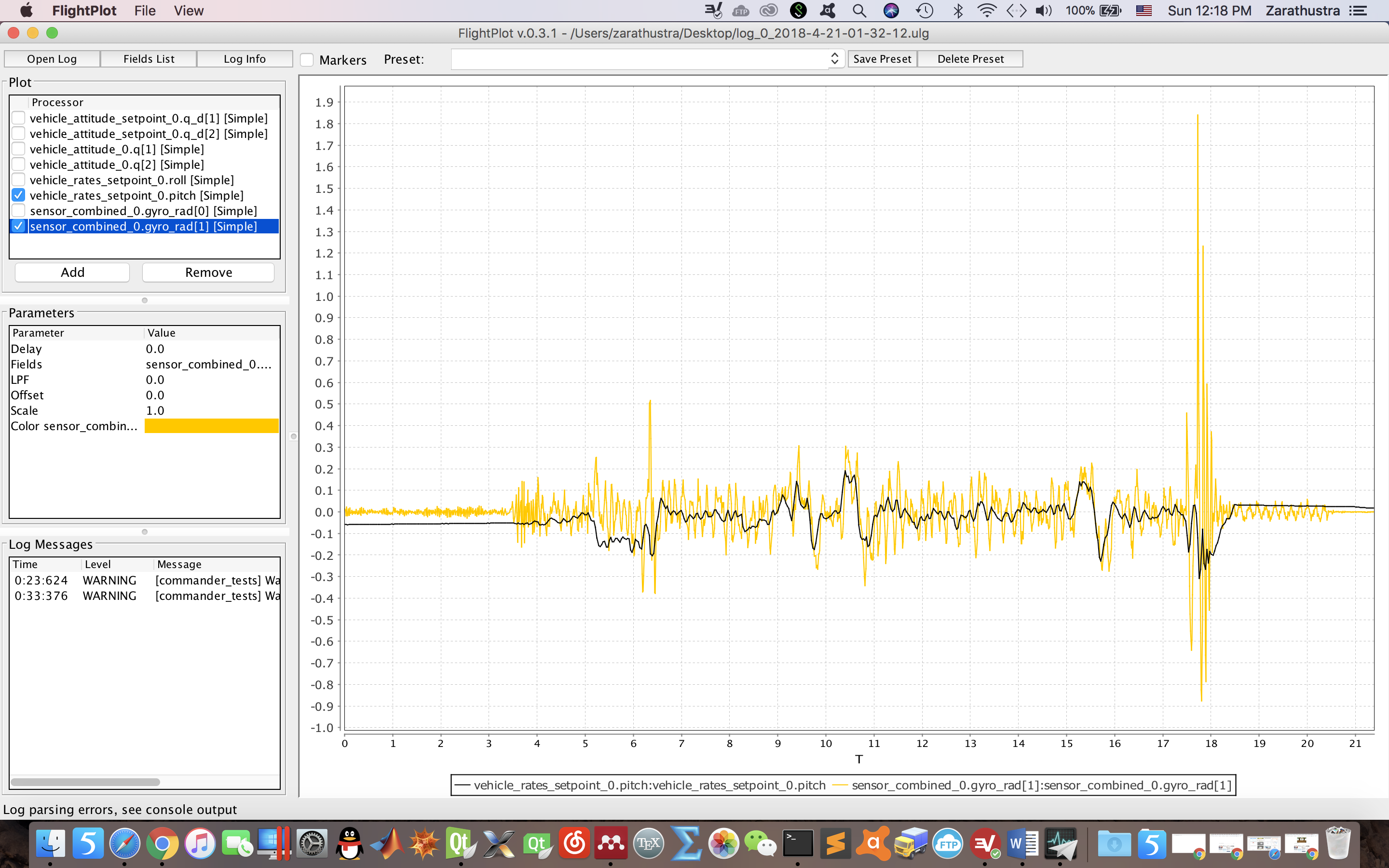
While for the external IMU, the performances are:
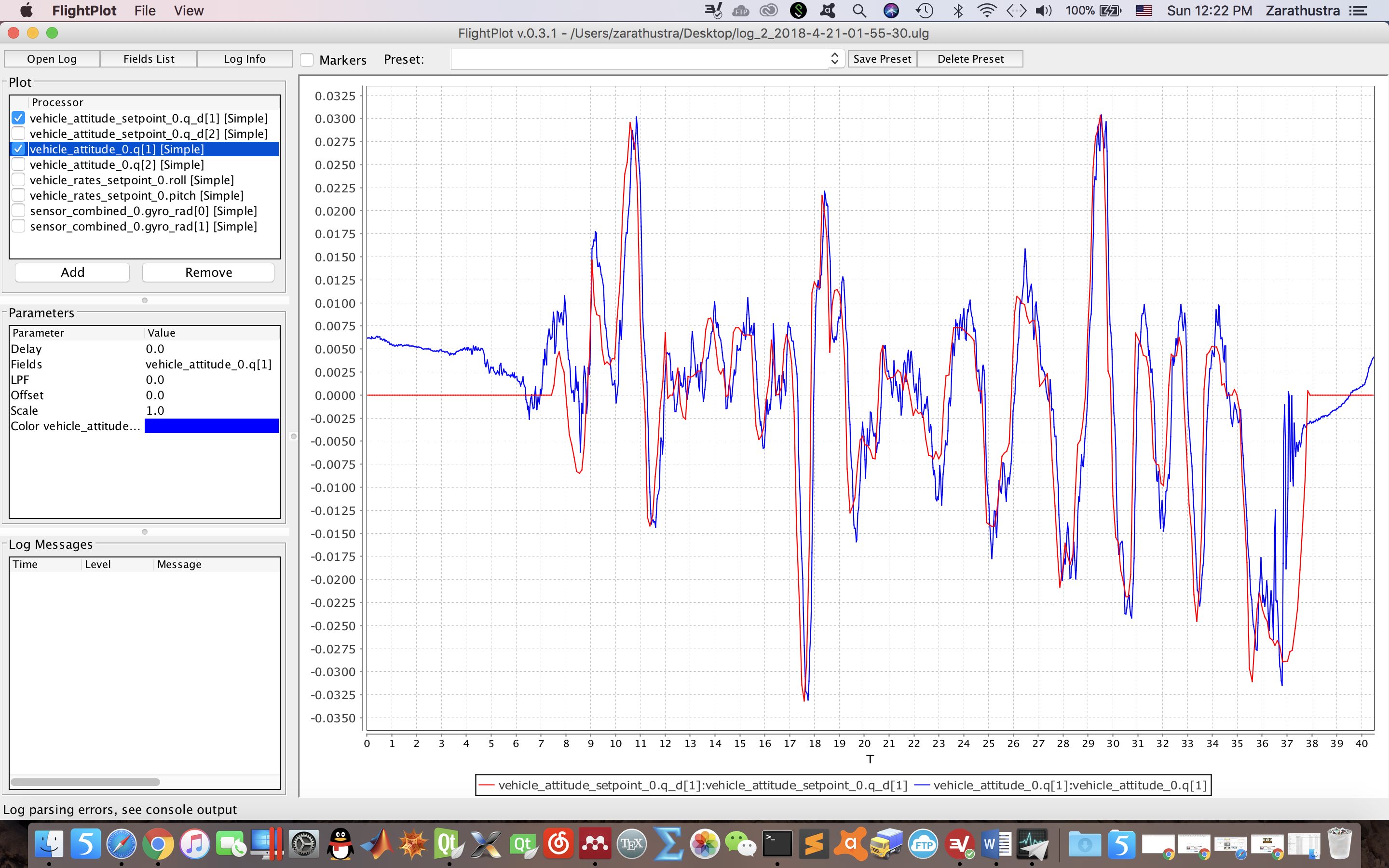
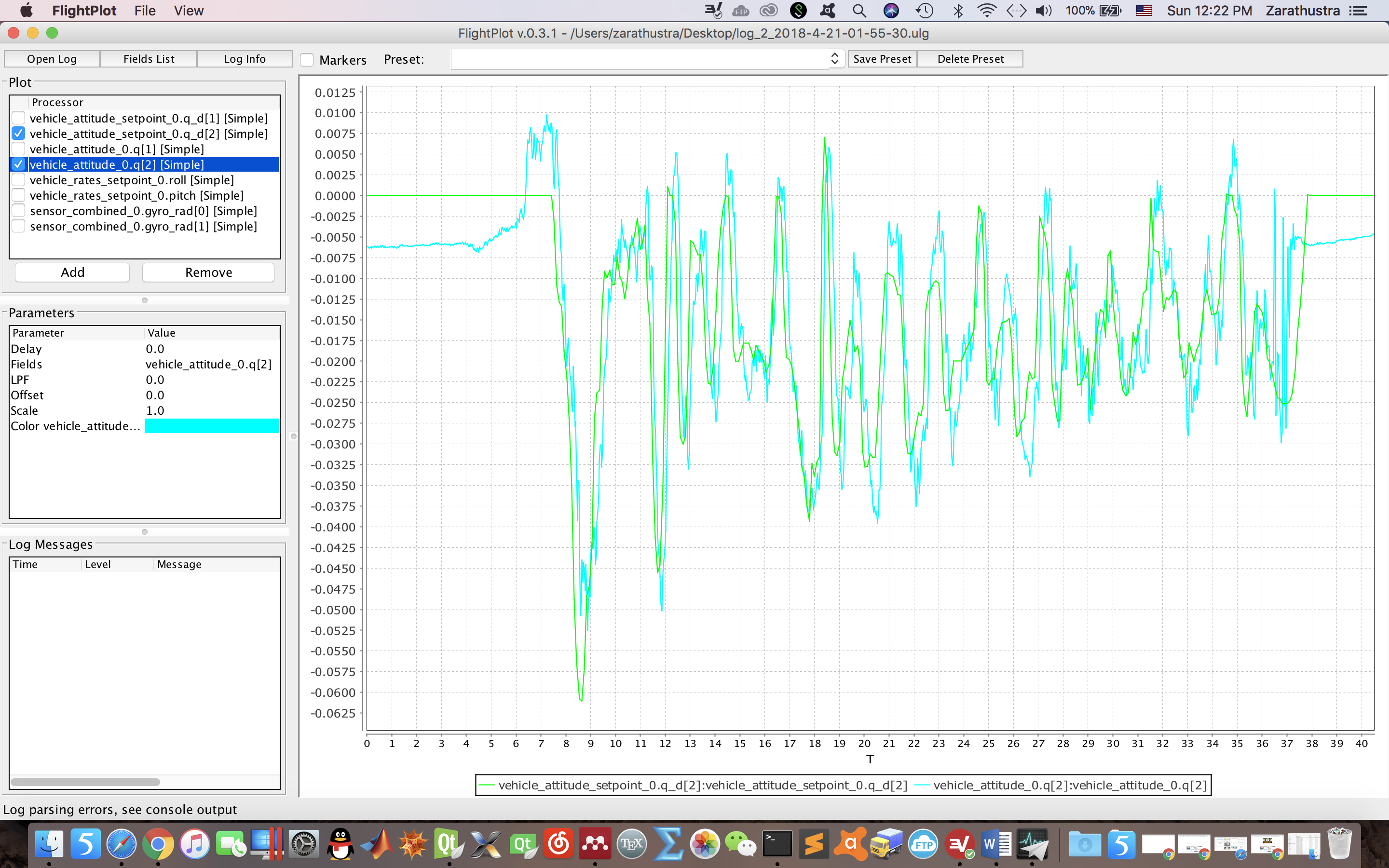
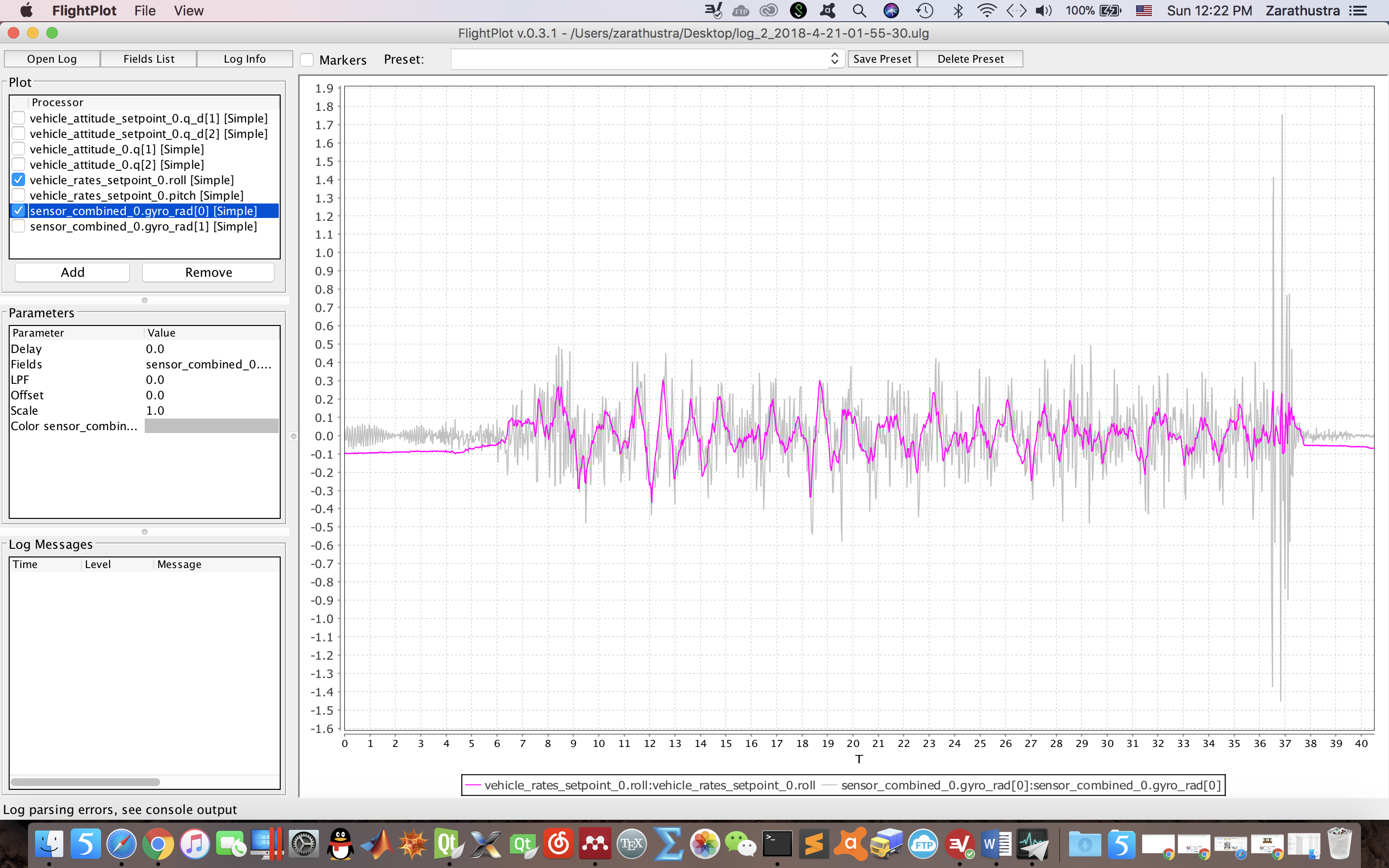
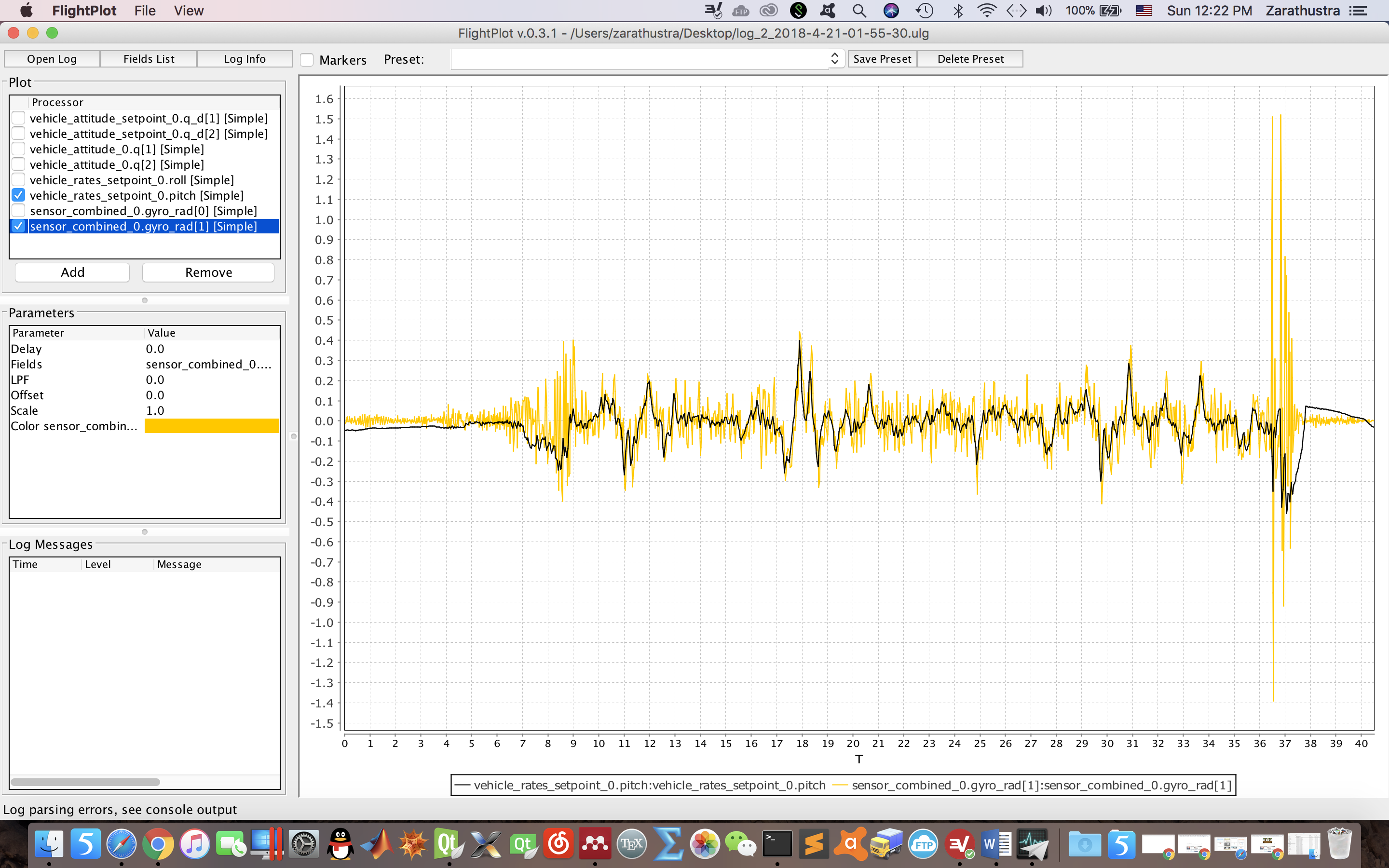
Note that here during the two flights, the parameters are default and the quadrotor is operated at the same position so the comparison is fair. It is obvious that the attitude rates control using ADI IMU is better which leads to better controlling behaviour on the roll and pitch. The basic version containing 3 ADXRS620 gyros and two ADXL203 accelerometers will be priced at 1999 RMB (317.7707 USD) while for the medium version it would be 2999 RMB (476.7355 USD) which replaces the yaw gyro with ADXRS642. All the sensors have been factory calibrated including factors, misalignment, biases and temperature drift. We hope that this is going to improve the flight experience of APM in the future!
PS: The test PX4 ulog files can be downloaded on: website
 zarathustr
zarathustr
All 10 comments
very cool, those gyros are nice but well outside my price range, but it got me thinking does arducopter support any of the hobby grade gyros externally on the spi port? trying to vibration isolate a pixhawk is very difficult when you have lots of wires attached to it but being able to soft mount a external gyro somewhere on the airframe would do a lot of good.
 geofrancis
on 22 Apr 2018
geofrancis
on 22 Apr 2018
@zarathustr, Ok,very interesting. looking forward to the pull request. Please consider doing a blog post as well on ardupilot.org.
@geofrancis, ardupilot supports quite a wide range of IMUs but normally I think we only look on the internal SPI port so some code changes would be required to make it look on the external port. The code changes would be quite small though I think.
 rmackay9
on 23 Apr 2018
rmackay9
on 23 Apr 2018
@rmackay9 I was thinking being able to mount an external IMU right in the CG could also be used to compensate for builds where the pixhawk is mounted far away from the CG.
geofrancis
on 23 Apr 2018
@zarathustr have you progressed this?
 auturgy
on 15 Oct 2018
auturgy
on 15 Oct 2018
@zarathustr Any updates ?
 Kiwa21
on 29 Apr 2019
Kiwa21
on 29 Apr 2019
any updates?
 niusanku
on 16 Jul 2019
niusanku
on 16 Jul 2019
Is there any further information about the implementation?
 trollp
on 20 Sep 2019
trollp
on 20 Sep 2019
Is there any further information about the implementation?
+1
 frontw
on 4 Oct 2019
frontw
on 4 Oct 2019
Any updates?
 neibrasil
on 10 Jan 2020
neibrasil
on 10 Jan 2020
I might close this issue because it's really more of a notification instead of an enhancement or bug report and there is a similar enhancement request to add support for high-end (aka expensive) IMUs or even full AHRSs here: https://github.com/ArduPilot/ardupilot/issues/11479.
By the way, there are some new IMUs from Invensense (and perhaps other manufacturers as well) that have a higher range (30G instead of the 16G of older IMUs) and these should improve the vehicle's resistance to high vibrations. These IMUs are starting to appear on new flight controllers like the Holybro Durandal and the Hex CubeOrange.
rmackay9
on 11 Jan 2020
Related issues
 Saijin-Naib
·
4Comments
rmackay9
·
4Comments
Saijin-Naib
·
4Comments
rmackay9
·
4Comments
 pklapperich
·
7Comments
rmackay9
·
4Comments
pklapperich
·
7Comments
rmackay9
·
4Comments
 JoshWelsh
·
4Comments
JoshWelsh
·
4Comments
Most helpful comment
Is there any further information about the implementation?