Ardupilot: Copter/Plane: handle QGC command uploads alt MAV_FRAME_GLOBAL_TERRAIN_ALT_INT
ArduPilot Copter and Plane only accept mission commands with terrain altitudes specified as MAV_FRAME_GLOBAL_TERRAIN_ALT ("10") but QGC uploads these using MAV_FRAME_GLOBAL_TERRAIN_ALT_INT ("11"). We should accept either.
At the moment, if the user attempts to upload using QGC, the altitude will silently be changed to an absolute altitude which is bad behaviour in itself actually.
The difficulty may come when we have to reply to the ground stations consistently with what they have uploaded (i.e. reply with TERRAIN_ALT_INT if that's what they uploaded).
As a side note, if QGC is sent a mission command which uses the TERRAIN_ALT frame (instead of TERRAIN_ALT_INT) it will display it to the user as shown below.
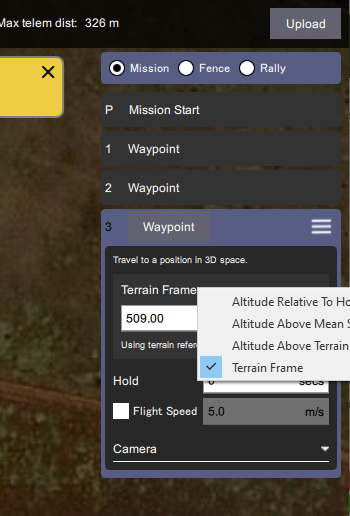
I thought that we could add, "MAV_FRAME_GLOBAL_TERRAIN_ALT_INT" to this list of cases here but it doesn't seem to help.
 rmackay9
rmackay9
All 4 comments
I'd have to double check but historically we always respond in whatever we think it should be regardless of the GCS request, which isn't the worst thing. Frankly the _INT's were a bad idea.
Anyways I'd agree that the 2 obvious things to do at the moment (that should be fairly quick):
- Translate TERRAIN_ALT_INT to TERRAIN_ALT internally on upload
- NACK the uploaded item if it's sent with a frame we don't understand. (
MAV_MISSION_UNSUPPORTED_FRAMEis for exactly this purpose)
 WickedShell
on 30 Nov 2019
WickedShell
on 30 Nov 2019
@DonLakeFlyer I think this might be an issue in QGC.
It definitely seems to be uploading with an incorrect frame.
Take this mission:
{
"fileType": "Plan",
"geoFence": {
"circles": [
],
"polygons": [
],
"version": 2
},
"groundStation": "QGroundControl",
"mission": {
"cruiseSpeed": 15,
"firmwareType": 3,
"hoverSpeed": 5,
"items": [
{
"AMSLAltAboveTerrain": null,
"Altitude": 50,
"AltitudeMode": 1,
"autoContinue": true,
"command": 16,
"doJumpId": 1,
"frame": 3,
"params": [
0,
0,
0,
0,
-35.36288833618164,
149.164794921875,
50
],
"type": "SimpleItem"
},
{
"AMSLAltAboveTerrain": 2386,
"Altitude": 1802,
"AltitudeMode": 3,
"autoContinue": true,
"command": 16,
"doJumpId": 2,
"frame": 0,
"params": [
0,
0,
0,
0,
-35.36267852783203,
149.1656951904297,
2386
],
"type": "SimpleItem"
},
{
"AMSLAltAboveTerrain": null,
"Altitude": 600,
"AltitudeMode": 2,
"autoContinue": true,
"command": 16,
"doJumpId": 3,
"frame": 0,
"params": [
0,
0,
0,
0,
-35.363525390625,
149.16580200195312,
600
],
"type": "SimpleItem"
},
{
"AMSLAltAboveTerrain": null,
"Altitude": 50,
"AltitudeMode": 1,
"autoContinue": true,
"command": 16,
"doJumpId": 4,
"frame": 3,
"params": [
0,
0,
0,
0,
-35.36398696899414,
149.16468811035156,
50
],
"type": "SimpleItem"
}
],
"plannedHomePosition": [
-35.36326217651367,
149.1652374267578,
585
],
"vehicleType": 2,
"version": 2
},
"rallyPoints": {
"points": [
],
"version": 2
},
"version": 1
}
When I added this debug:
@@ -551,6 +553,7 @@ void PlanManager::_handleMissionRequest(const mavlink_message_t& message, bool m
item->param7(),
_planType);
} else {
+ ::fprintf(stderr, "itemx %u has frame %u\n", (unsigned)missionRequest.seq, (unsigned)item->frame());
mavlink_msg_mission_item_pack_chan(qgcApp()->toolbox()->mavlinkProtocol()->getSystemId(),
qgcApp()->toolbox()->mavlinkProtocol()->getComponentId(),
_dedicatedLink->mavlinkChannel(),
in PlanManager.cpp I get this output:
itemx 0 has frame 0
itemx 1 has frame 3
itemx 2 has frame 0
itemx 3 has frame 0
itemx 4 has frame 3
One of those items should have a frame of 10 - TERRAIN_ALT.
The frame is zero in the saved file, but reloading the file does seem to work - I guess it's going off the other fields in the JSON.
@DonLakeFlyer should I raise an issue against QGC?
 peterbarker
on 3 Dec 2019
peterbarker
on 3 Dec 2019
QGC doesn't support MAV_FRAME_GLOBAL_TERRAIN_ALT_INT. "Above Terrain" for altitudes sets an absolute altitude based on the terrain height plus the request all above terrain.
 DonLakeFlyer
on 10 Dec 2019
DonLakeFlyer
on 10 Dec 2019
I'll close this issue then 'cuz we've got the issue now on the QGC issues list. Thanks @DonLakeFlyer!
rmackay9
on 10 Dec 2019
Related issues
 pklapperich
·
7Comments
pklapperich
·
7Comments
 bosskwei
·
3Comments
bosskwei
·
3Comments
 Naterater
·
3Comments
Naterater
·
3Comments
 dongtuu
·
3Comments
dongtuu
·
3Comments
 jinchengde
·
4Comments
jinchengde
·
4Comments