Yarp: Unable to compile YARP in windows
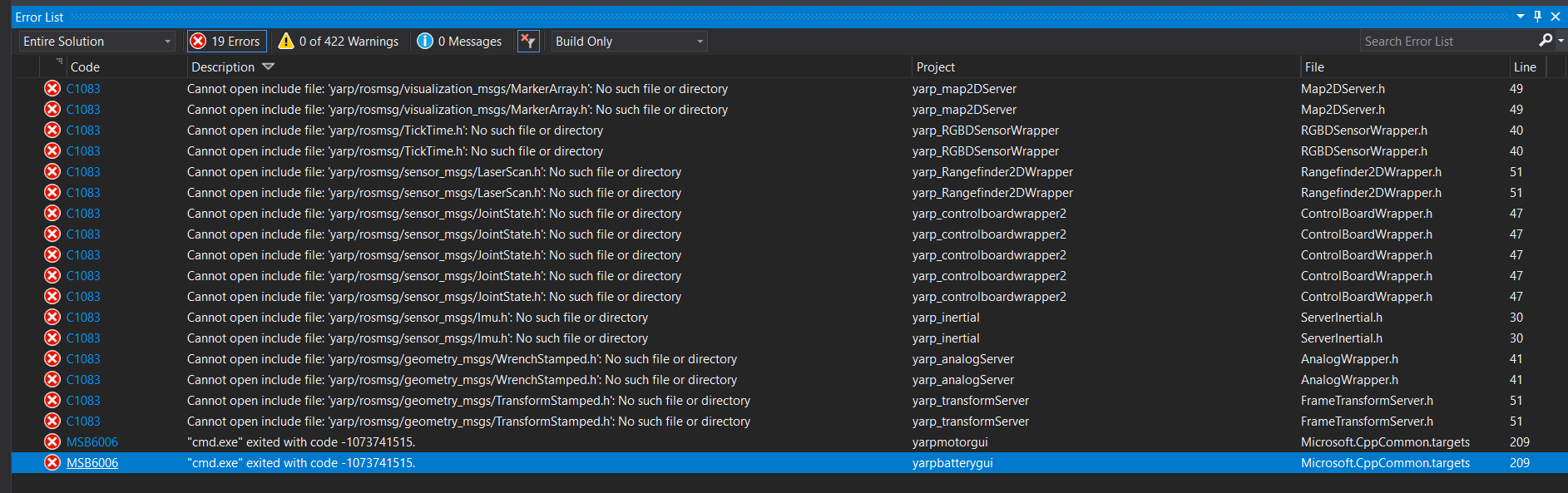
When I try to compile YARP in windows (https://github.com/robotology/yarp/commit/06b62f05336b1f1462242636908787bcee5d6c53) all the components that uses rosmsg fail
Is there someone that can help me? @drdanz @traversaro
1>------ Build started: Project: ZERO_CHECK, Configuration: Release x64 ------
2>------ Build started: Project: YARP_priv_hmac, Configuration: Release x64 ------
3>------ Build started: Project: YARP_priv_tinyxml, Configuration: Release x64 ------
4>------ Build started: Project: YARP_priv_sqlite, Configuration: Release x64 ------
5>------ Build started: Project: yarpidl_thrift, Configuration: Release x64 ------
6>------ Build started: Project: YARP_priv_qcustomplot, Configuration: Release x64 ------
7>------ Build started: Project: YARP_priv_xmlrpcpp, Configuration: Release x64 ------
8>------ Build started: Project: yarpmod, Configuration: Release x64 ------
9>------ Build started: Project: yarpscope, Configuration: Release x64 ------
2>YARP_priv_hmac.vcxproj -> C:\Users\icub\sb\build\robotology\YARP\lib\Release\YARP_priv_hmac.lib
10>------ Build started: Project: YARP_os, Configuration: Release x64 ------
3>YARP_priv_tinyxml.vcxproj -> C:\Users\icub\sb\build\robotology\YARP\lib\Release\YARP_priv_tinyxml.lib
11>------ Build started: Project: yarpview, Configuration: Release x64 ------
6>Automatic MOC for target YARP_priv_qcustomplot
4>YARP_priv_sqlite.vcxproj -> C:\Users\icub\sb\build\robotology\YARP\lib\Release\YARP_priv_sqlite.lib
12>------ Build started: Project: yarpcar, Configuration: Release x64 ------
11>Automatic MOC for target yarpview
5>yarpidl_thrift.vcxproj -> C:\Users\icub\sb\build\robotology\YARP\bin\Release\yarpidl_thrift.exe
7>YARP_priv_xmlrpcpp.vcxproj -> C:\Users\icub\sb\build\robotology\YARP\lib\Release\YARP_priv_xmlrpcpp.lib
12>yarpcar.vcxproj -> C:\Users\icub\sb\build\robotology\YARP\bin\Release\yarpcar.dll
11>yarpview.vcxproj -> C:\Users\icub\sb\build\robotology\YARP\bin\Release\yarpview.exe
9>Automatic MOC for target yarpscope
8>yarpmod.vcxproj -> C:\Users\icub\sb\build\robotology\YARP\bin\Release\yarpmod.dll
10>YARP_os.vcxproj -> C:\Users\icub\sb\build\robotology\YARP\bin\Release\YARP_os.dll
6>YARP_priv_qcustomplot.vcxproj -> C:\Users\icub\sb\build\robotology\YARP\lib\Release\YARP_priv_qcustomplot.lib
9>yarpscope.vcxproj -> C:\Users\icub\sb\build\robotology\YARP\bin\Release\yarpscope.exe
13>------ Build started: Project: YARP_init, Configuration: Release x64 ------
14>------ Build started: Project: YARP_sig, Configuration: Release x64 ------
15>------ Build started: Project: YARP_companion, Configuration: Release x64 ------
16>------ Build started: Project: YARP_name, Configuration: Release x64 ------
17>------ Build started: Project: YARP_run, Configuration: Release x64 ------
18>------ Build started: Project: yarp_human, Configuration: Release x64 ------
17>YARP_run.vcxproj -> C:\Users\icub\sb\build\robotology\YARP\bin\Release\YARP_run.dll
18>yarp_human.vcxproj -> C:\Users\icub\sb\build\robotology\YARP\lib\yarp\Release\yarp_human.dll
16>YARP_name.vcxproj -> C:\Users\icub\sb\build\robotology\YARP\bin\Release\YARP_name.dll
13>YARP_init.vcxproj -> C:\Users\icub\sb\build\robotology\YARP\bin\Release\YARP_init.dll
14>YARP_sig.vcxproj -> C:\Users\icub\sb\build\robotology\YARP\bin\Release\YARP_sig.dll
15>YARP_companion.vcxproj -> C:\Users\icub\sb\build\robotology\YARP\bin\Release\YARP_companion.dll
19>------ Build started: Project: yarp_portmonitor, Configuration: Release x64 ------
19>yarp_portmonitor.vcxproj -> C:\Users\icub\sb\build\robotology\YARP\lib\yarp\Release\yarp_portmonitor.dll
20>------ Build started: Project: yarp_shmem, Configuration: Release x64 ------
20>yarp_shmem.vcxproj -> C:\Users\icub\sb\build\robotology\YARP\lib\yarp\Release\yarp_shmem.dll
21>------ Build started: Project: yarp_xmlrpc, Configuration: Release x64 ------
22>------ Build started: Project: yarpidl_rosmsg, Configuration: Release x64 ------
23>------ Build started: Project: QtYARPScopePlugin, Configuration: Release x64 ------
24>------ Build started: Project: YARP_serversql, Configuration: Release x64 ------
22>yarpidl_rosmsg.vcxproj -> C:\Users\icub\sb\build\robotology\YARP\bin\Release\yarpidl_rosmsg.exe
25>------ Build started: Project: YARP_math, Configuration: Release x64 ------
26>------ Build started: Project: multipleAnalogSensorsSerializations, Configuration: Release x64 ------
23>Automatic MOC for target QtYARPScopePlugin
24>YARP_serversql.vcxproj -> C:\Users\icub\sb\build\robotology\YARP\bin\Release\YARP_serversql.dll
25>YARP_math.vcxproj -> C:\Users\icub\sb\build\robotology\YARP\bin\Release\YARP_math.dll
27>------ Build started: Project: YARP_wire_rep_utils, Configuration: Release x64 ------
28>------ Build started: Project: joypadcontrolnetutils, Configuration: Release x64 ------
27>YARP_wire_rep_utils.vcxproj -> C:\Users\icub\sb\build\robotology\YARP\lib\Release\YARP_wire_rep_utils.lib
28>joypadcontrolnetutils.vcxproj -> C:\Users\icub\sb\build\robotology\YARP\src\devices\JoypadControlNetUtils\joypadcontrolnetutils.dir\Release\joypadcontrolnetutils.lib
21>yarp_xmlrpc.vcxproj -> C:\Users\icub\sb\build\robotology\YARP\lib\yarp\Release\yarp_xmlrpc.dll
29>------ Build started: Project: YARP_rosmsg_gen_diagnostic_msgs, Configuration: Release x64 ------
29>Generating code from ../../../extern/ros/common_msgs/diagnostic_msgs/msg/DiagnosticArray.msg
29>C:\Program Files (x86)\Microsoft Visual Studio\2017\Enterprise\Common7\IDE\VC\VCTargets\Microsoft.CppCommon.targets(209,5): error MSB6006: "cmd.exe" exited with code -1073741515.
29>Done building project "YARP_rosmsg_gen_diagnostic_msgs.vcxproj" -- FAILED.
30>------ Build started: Project: YARP_rosmsg_gen_geometry_msgs, Configuration: Release x64 ------
31>------ Build started: Project: YARP_rosmsg_gen_native, Configuration: Release x64 ------
26>multipleAnalogSensorsSerializations.vcxproj -> C:\Users\icub\sb\build\robotology\YARP\src\devices\multipleAnalogSensorsMsgs\multipleAnalogSensorsSerializations.dir\Release\multipleAnalogSensorsSerializations.lib
32>------ Build started: Project: YARP_rosmsg_gen_nav_msgs, Configuration: Release x64 ------
33>------ Build started: Project: YARP_rosmsg_gen_sensor_msgs, Configuration: Release x64 ------
34>------ Build started: Project: YARP_rosmsg_gen_shape_msgs, Configuration: Release x64 ------
23>QtYARPScopePlugin.vcxproj -> C:\Users\icub\sb\build\robotology\YARP\lib\qt5\qml\Release\robotology\yarp\scope\QtYARPScopePlugin.dll
30>Generating code from ../../../extern/ros/common_msgs/geometry_msgs/msg/Accel.msg
32>Generating code from ../../../extern/ros/common_msgs/nav_msgs/msg/GridCells.msg
30>C:\Program Files (x86)\Microsoft Visual Studio\2017\Enterprise\Common7\IDE\VC\VCTargets\Microsoft.CppCommon.targets(209,5): error MSB6006: "cmd.exe" exited with code -1073741515.
30>Done building project "YARP_rosmsg_gen_geometry_msgs.vcxproj" -- FAILED.
35>------ Build started: Project: YARP_rosmsg_gen_std_msgs, Configuration: Release x64 ------
36>------ Build started: Project: YARP_rosmsg_gen_stereo_msgs, Configuration: Release x64 ------
34>Generating code from ../../../extern/ros/common_msgs/shape_msgs/msg/Mesh.msg
31>Generating code from time
33>Generating code from ../../../extern/ros/common_msgs/sensor_msgs/msg/BatteryState.msg
32>C:\Program Files (x86)\Microsoft Visual Studio\2017\Enterprise\Common7\IDE\VC\VCTargets\Microsoft.CppCommon.targets(209,5): error MSB6006: "cmd.exe" exited with code -1073741515.
32>Done building project "YARP_rosmsg_gen_nav_msgs.vcxproj" -- FAILED.
37>------ Build started: Project: YARP_rosmsg_gen_tf, Configuration: Release x64 ------
33>C:\Program Files (x86)\Microsoft Visual Studio\2017\Enterprise\Common7\IDE\VC\VCTargets\Microsoft.CppCommon.targets(209,5): error MSB6006: "cmd.exe" exited with code -1073741515.
33>Done building project "YARP_rosmsg_gen_sensor_msgs.vcxproj" -- FAILED.
38>------ Build started: Project: YARP_rosmsg_gen_tf2_msgs, Configuration: Release x64 ------
31>C:\Program Files (x86)\Microsoft Visual Studio\2017\Enterprise\Common7\IDE\VC\VCTargets\Microsoft.CppCommon.targets(209,5): error MSB6006: "cmd.exe" exited with code -1073741515.
31>Done building project "YARP_rosmsg_gen_native.vcxproj" -- FAILED.
39>------ Build started: Project: YARP_rosmsg_gen_trajectory_msgs, Configuration: Release x64 ------
34>C:\Program Files (x86)\Microsoft Visual Studio\2017\Enterprise\Common7\IDE\VC\VCTargets\Microsoft.CppCommon.targets(209,5): error MSB6006: "cmd.exe" exited with code -1073741515.
34>Done building project "YARP_rosmsg_gen_shape_msgs.vcxproj" -- FAILED.
40>------ Build started: Project: YARP_rosmsg_gen_visualization_msgs, Configuration: Release x64 ------
36>Generating code from ../../../extern/ros/common_msgs/stereo_msgs/msg/DisparityImage.msg
35>Generating code from ../../../extern/ros/std_msgs/msg/Bool.msg
37>Generating code from ../../../extern/ros/geometry/tf/msg/tfMessage.msg
36>C:\Program Files (x86)\Microsoft Visual Studio\2017\Enterprise\Common7\IDE\VC\VCTargets\Microsoft.CppCommon.targets(209,5): error MSB6006: "cmd.exe" exited with code -1073741515.
36>Done building project "YARP_rosmsg_gen_stereo_msgs.vcxproj" -- FAILED.
41>------ Build started: Project: YARP_rosmsg_gen_actionlib_msgs, Configuration: Release x64 ------
39>Generating code from ../../../extern/ros/common_msgs/trajectory_msgs/msg/JointTrajectory.msg
35>C:\Program Files (x86)\Microsoft Visual Studio\2017\Enterprise\Common7\IDE\VC\VCTargets\Microsoft.CppCommon.targets(209,5): error MSB6006: "cmd.exe" exited with code -1073741515.
37>C:\Program Files (x86)\Microsoft Visual Studio\2017\Enterprise\Common7\IDE\VC\VCTargets\Microsoft.CppCommon.targets(209,5): error MSB6006: "cmd.exe" exited with code -1073741515.
37>Done building project "YARP_rosmsg_gen_tf.vcxproj" -- FAILED.
38>Generating code from ../../../extern/ros/geometry2/tf2_msgs/msg/TF2Error.msg
35>Done building project "YARP_rosmsg_gen_std_msgs.vcxproj" -- FAILED.
42>------ Build started: Project: YARP_profiler, Configuration: Release x64 ------
43>------ Build started: Project: YARP_logger, Configuration: Release x64 ------
40>Generating code from ../../../extern/ros/common_msgs/visualization_msgs/msg/ImageMarker.msg
39>C:\Program Files (x86)\Microsoft Visual Studio\2017\Enterprise\Common7\IDE\VC\VCTargets\Microsoft.CppCommon.targets(209,5): error MSB6006: "cmd.exe" exited with code -1073741515.
39>Done building project "YARP_rosmsg_gen_trajectory_msgs.vcxproj" -- FAILED.
40>C:\Program Files (x86)\Microsoft Visual Studio\2017\Enterprise\Common7\IDE\VC\VCTargets\Microsoft.CppCommon.targets(209,5): error MSB6006: "cmd.exe" exited with code -1073741515.
40>Done building project "YARP_rosmsg_gen_visualization_msgs.vcxproj" -- FAILED.
44>------ Build started: Project: YARP_manager, Configuration: Release x64 ------
45>------ Build started: Project: yarpros, Configuration: Release x64 ------
38>C:\Program Files (x86)\Microsoft Visual Studio\2017\Enterprise\Common7\IDE\VC\VCTargets\Microsoft.CppCommon.targets(209,5): error MSB6006: "cmd.exe" exited with code -1073741515.
38>Done building project "YARP_rosmsg_gen_tf2_msgs.vcxproj" -- FAILED.
46>------ Build started: Project: yarprun, Configuration: Release x64 ------
41>Generating code from ../../../extern/ros/common_msgs/actionlib_msgs/msg/GoalID.msg
41>C:\Program Files (x86)\Microsoft Visual Studio\2017\Enterprise\Common7\IDE\VC\VCTargets\Microsoft.CppCommon.targets(209,5): error MSB6006: "cmd.exe" exited with code -1073741515.
41>Done building project "YARP_rosmsg_gen_actionlib_msgs.vcxproj" -- FAILED.
47>------ Build started: Project: YARP_rosmsg_gen_all, Configuration: Release x64 ------
43>YARP_logger.vcxproj -> C:\Users\icub\sb\build\robotology\YARP\lib\Release\YARP_logger.lib
48>------ Build started: Project: yarplogger, Configuration: Release x64 ------
45>yarpros.vcxproj -> C:\Users\icub\sb\build\robotology\YARP\bin\Release\yarpros.exe
42>YARP_profiler.vcxproj -> C:\Users\icub\sb\build\robotology\YARP\lib\Release\YARP_profiler.lib
46>yarprun.vcxproj -> C:\Users\icub\sb\build\robotology\YARP\bin\Release\yarprun.exe
49>------ Build started: Project: yarplogger-console, Configuration: Release x64 ------
48>Automatic MOC for target yarplogger
49>yarplogger-console.vcxproj -> C:\Users\icub\sb\build\robotology\YARP\bin\Release\yarplogger-console.exe
48>Generating qrc_res.cpp
48>Generating ui_advanced_dialog.h
48>C:\Program Files (x86)\Microsoft Visual Studio\2017\Enterprise\Common7\IDE\VC\VCTargets\Microsoft.CppCommon.targets(209,5): error MSB6006: "cmd.exe" exited with code -1073741515.
48>Done building project "yarplogger.vcxproj" -- FAILED.
50>------ Build started: Project: QtYARPViewPlugin, Configuration: Release x64 ------
50>Automatic MOC for target QtYARPViewPlugin
51>------ Build started: Project: yarpserver, Configuration: Release x64 ------
51>yarpserver.vcxproj -> C:\Users\icub\sb\build\robotology\YARP\bin\Release\yarpserver.exe
50>QtYARPViewPlugin.vcxproj -> C:\Users\icub\sb\build\robotology\YARP\lib\qt5\qml\Release\robotology\yarp\view\QtYARPViewPlugin.dll
52>------ Build started: Project: YARP_gsl, Configuration: Release x64 ------
52>YARP_gsl.vcxproj -> C:\Users\icub\sb\build\robotology\YARP\bin\Release\YARP_gsl.dll
53>------ Build started: Project: yarp, Configuration: Release x64 ------
53>yarp.vcxproj -> C:\Users\icub\sb\build\robotology\YARP\bin\Release\yarp.exe
54>------ Build started: Project: yarp-config, Configuration: Release x64 ------
54>yarp-config.vcxproj -> C:\Users\icub\sb\build\robotology\YARP\bin\Release\yarp-config.exe
55>------ Build started: Project: yarp_bayer, Configuration: Release x64 ------
55>yarp_bayer.vcxproj -> C:\Users\icub\sb\build\robotology\YARP\lib\yarp\Release\yarp_bayer.dll
56>------ Build started: Project: yarp_priority, Configuration: Release x64 ------
56>yarp_priority.vcxproj -> C:\Users\icub\sb\build\robotology\YARP\lib\yarp\Release\yarp_priority.dll
57>------ Build started: Project: yarp_tcpros, Configuration: Release x64 ------
57>yarp_tcpros.vcxproj -> C:\Users\icub\sb\build\robotology\YARP\lib\yarp\Release\yarp_tcpros.dll
58>------ Build started: Project: yarpdatadumper, Configuration: Release x64 ------
58>yarpdatadumper.vcxproj -> C:\Users\icub\sb\build\robotology\YARP\bin\Release\yarpdatadumper.exe
59>------ Build started: Project: yarpdataplayer, Configuration: Release x64 ------
59>Automatic MOC for target yarpdataplayer
44>YARP_manager.vcxproj -> C:\Users\icub\sb\build\robotology\YARP\lib\Release\YARP_manager.lib
60>------ Build started: Project: yarpmanager, Configuration: Release x64 ------
61>------ Build started: Project: yarpmanager-console, Configuration: Release x64 ------
59>Generating qrc_res.cpp
59>Generating ui_aboutdlg.h
61>yarpmanager-console.vcxproj -> C:\Users\icub\sb\build\robotology\YARP\bin\Release\yarpmanager-console.exe
59>C:\Program Files (x86)\Microsoft Visual Studio\2017\Enterprise\Common7\IDE\VC\VCTargets\Microsoft.CppCommon.targets(209,5): error MSB6006: "cmd.exe" exited with code -1073741515.
59>Done building project "yarpdataplayer.vcxproj" -- FAILED.
60>Automatic MOC for target yarpmanager
60>Generating qrc_res.cpp
60>Generating ui_aboutdlg.h
60>C:\Program Files (x86)\Microsoft Visual Studio\2017\Enterprise\Common7\IDE\VC\VCTargets\Microsoft.CppCommon.targets(209,5): error MSB6006: "cmd.exe" exited with code -1073741515.
60>Done building project "yarpmanager.vcxproj" -- FAILED.
47>Building Custom Rule C:/Users/icub/sb/robotology/YARP/src/libYARP_rosmsg/src/CMakeLists.txt
47>CMake does not need to re-run because C:/Users/icub/sb/build/robotology/YARP/src/libYARP_rosmsg/src/CMakeFiles/generate.stamp is up-to-date.
62>------ Build started: Project: YARP_dev, Configuration: Release x64 ------
62>Building Custom Rule C:/Users/icub/sb/robotology/YARP/src/libYARP_dev/src/CMakeLists.txt
62>CMake does not need to re-run because C:/Users/icub/sb/build/robotology/YARP/src/libYARP_dev/src/CMakeFiles/generate.stamp is up-to-date.
62>AudioBufferSize.cpp
62>CanBusInterface.cpp
62>CartesianControl.cpp
62>C:\Users\icub\sb\robotology\YARP\src\libYARP_dev\src\yarp/dev/CartesianControl.h(49): warning C4251: 'yarp::dev::CartesianEventParameters::type': class 'std::basic_string<char,std::char_traits<char>,std::allocator<char>>' needs to have dll-interface to be used by clients of struct 'yarp::dev::CartesianEventParameters'
62>C:\Program Files (x86)\Microsoft Visual Studio\2017\Enterprise\VC\Tools\MSVC\14.16.27023\include\xstring(4373): note: see declaration of 'std::basic_string<char,std::char_traits<char>,std::allocator<char>>'
62>C:\Users\icub\sb\robotology\YARP\src\libYARP_dev\src\yarp/dev/CartesianControl.h(71): warning C4251: 'yarp::dev::CartesianEventVariables::type': class 'std::basic_string<char,std::char_traits<char>,std::allocator<char>>' needs to have dll-interface to be used by clients of struct 'yarp::dev::CartesianEventVariables'
62>C:\Program Files (x86)\Microsoft Visual Studio\2017\Enterprise\VC\Tools\MSVC\14.16.27023\include\xstring(4373): note: see declaration of 'std::basic_string<char,std::char_traits<char>,std::allocator<char>>'
62>ControlBoardHelper.cpp
62>ControlBoardInterfacesImpl.cpp
62>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Port.h(248): warning C4996: 'yarp::os::Contactable::setCallbackLock': Use setCallbackLock with std::mutex instead
62>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Contactable.h(338): note: see declaration of 'yarp::os::Contactable::setCallbackLock'
62>ControlBoardPid.cpp
62>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Port.h(248): warning C4996: 'yarp::os::Contactable::setCallbackLock': Use setCallbackLock with std::mutex instead
62>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Contactable.h(338): note: see declaration of 'yarp::os::Contactable::setCallbackLock'
62>DeviceDriver.cpp
62>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Port.h(248): warning C4996: 'yarp::os::Contactable::setCallbackLock': Use setCallbackLock with std::mutex instead
62>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Contactable.h(338): note: see declaration of 'yarp::os::Contactable::setCallbackLock'
62>DriverLinkCreator.cpp
62>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Port.h(248): warning C4996: 'yarp::os::Contactable::setCallbackLock': Use setCallbackLock with std::mutex instead
62>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Contactable.h(338): note: see declaration of 'yarp::os::Contactable::setCallbackLock'
62>Drivers.cpp
62>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/YarpPluginSelector.h(35): warning C4251: 'yarp::os::YarpPluginSelector::mutex': class 'std::mutex' needs to have dll-interface to be used by clients of class 'yarp::os::YarpPluginSelector'
62>C:\Program Files (x86)\Microsoft Visual Studio\2017\Enterprise\VC\Tools\MSVC\14.16.27023\include\mutex(82): note: see declaration of 'std::mutex'
62>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Port.h(248): warning C4996: 'yarp::os::Contactable::setCallbackLock': Use setCallbackLock with std::mutex instead
62>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Contactable.h(338): note: see declaration of 'yarp::os::Contactable::setCallbackLock'
62>FrameGrabberControlImpl.cpp
62>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Port.h(248): warning C4996: 'yarp::os::Contactable::setCallbackLock': Use setCallbackLock with std::mutex instead
62>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Contactable.h(338): note: see declaration of 'yarp::os::Contactable::setCallbackLock'
62>GazeControl.cpp
62>C:\Users\icub\sb\robotology\YARP\src\libYARP_dev\src\yarp/dev/GazeControl.h(59): warning C4251: 'yarp::dev::GazeEventParameters::type': class 'std::basic_string<char,std::char_traits<char>,std::allocator<char>>' needs to have dll-interface to be used by clients of struct 'yarp::dev::GazeEventParameters'
62>C:\Program Files (x86)\Microsoft Visual Studio\2017\Enterprise\VC\Tools\MSVC\14.16.27023\include\xstring(4373): note: see declaration of 'std::basic_string<char,std::char_traits<char>,std::allocator<char>>'
62>C:\Users\icub\sb\robotology\YARP\src\libYARP_dev\src\yarp/dev/GazeControl.h(81): warning C4251: 'yarp::dev::GazeEventVariables::type': class 'std::basic_string<char,std::char_traits<char>,std::allocator<char>>' needs to have dll-interface to be used by clients of struct 'yarp::dev::GazeEventVariables'
62>C:\Program Files (x86)\Microsoft Visual Studio\2017\Enterprise\VC\Tools\MSVC\14.16.27023\include\xstring(4373): note: see declaration of 'std::basic_string<char,std::char_traits<char>,std::allocator<char>>'
62>IAnalogSensor.cpp
62>IAudioGrabberSound.cpp
62>IAudioRender.cpp
62>IAudioVisualGrabber.cpp
62>IAudioVisualStream.cpp
62>IBattery.cpp
62>IFrameWriterAudioVisual.cpp
62>IGenericSensor.cpp
62>IJoypadController.cpp
62>C:\Users\icub\sb\robotology\YARP\src\libYARP_dev\src\yarp\dev\IJoypadController.cpp(457): warning C4267: '=': conversion from 'size_t' to 'int', possible loss of data
62>Generating Code...
62>Compiling...
62>IMultipleWrapper.cpp
62>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Port.h(248): warning C4996: 'yarp::os::Contactable::setCallbackLock': Use setCallbackLock with std::mutex instead
62>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Contactable.h(338): note: see declaration of 'yarp::os::Contactable::setCallbackLock'
62>IPreciselyTimed.cpp
62>IRGBDSensor.cpp
62>IRangefinder2D.cpp
62>IRemoteCalibrator.cpp
62>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Port.h(248): warning C4996: 'yarp::os::Contactable::setCallbackLock': Use setCallbackLock with std::mutex instead
62>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Contactable.h(338): note: see declaration of 'yarp::os::Contactable::setCallbackLock'
62>IRobotDescription.cpp
62>ISerialDevice.cpp
62>IVisualParamsImpl.cpp
62>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Port.h(248): warning C4996: 'yarp::os::Contactable::setCallbackLock': Use setCallbackLock with std::mutex instead
62>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Contactable.h(338): note: see declaration of 'yarp::os::Contactable::setCallbackLock'
62>C:\Users\icub\sb\robotology\YARP\src\libYARP_dev\src\yarp\dev\IVisualParamsImpl.cpp(250): warning C4267: 'argument': conversion from 'size_t' to 'int32_t', possible loss of data
62>IVisualServoing.cpp
62>IWrapper.cpp
62>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Port.h(248): warning C4996: 'yarp::os::Contactable::setCallbackLock': Use setCallbackLock with std::mutex instead
62>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Contactable.h(338): note: see declaration of 'yarp::os::Contactable::setCallbackLock'
62>ImplementAmplifierControl.cpp
62>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Port.h(248): warning C4996: 'yarp::os::Contactable::setCallbackLock': Use setCallbackLock with std::mutex instead
62>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Contactable.h(338): note: see declaration of 'yarp::os::Contactable::setCallbackLock'
62>ImplementAxisInfo.cpp
62>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Port.h(248): warning C4996: 'yarp::os::Contactable::setCallbackLock': Use setCallbackLock with std::mutex instead
62>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Contactable.h(338): note: see declaration of 'yarp::os::Contactable::setCallbackLock'
62>ImplementControlCalibration.cpp
62>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Port.h(248): warning C4996: 'yarp::os::Contactable::setCallbackLock': Use setCallbackLock with std::mutex instead
62>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Contactable.h(338): note: see declaration of 'yarp::os::Contactable::setCallbackLock'
62>ImplementControlLimits.cpp
62>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Port.h(248): warning C4996: 'yarp::os::Contactable::setCallbackLock': Use setCallbackLock with std::mutex instead
62>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Contactable.h(338): note: see declaration of 'yarp::os::Contactable::setCallbackLock'
62>ImplementControlMode.cpp
62>c:\users\icub\sb\robotology\yarp\src\libyarp_dev\src\yarp\dev\impl\FixedSizeBuffersManager-inl.h(102): warning C4267: '=': conversion from 'size_t' to 'uint32_t', possible loss of data
62>c:\users\icub\sb\robotology\yarp\src\libyarp_dev\src\yarp\dev\impl\FixedSizeBuffersManager-inl.h(88): note: while compiling class template member function 'yarp::dev::impl::Buffer<T> yarp::dev::impl::FixedSizeBuffersManager<T>::getBuffer(void)'
62> with
62> [
62> T=int
62> ]
62>C:\Users\icub\sb\robotology\YARP\src\libYARP_dev\src\yarp\dev\ImplementControlMode.cpp(68): note: see reference to function template instantiation 'yarp::dev::impl::Buffer<T> yarp::dev::impl::FixedSizeBuffersManager<T>::getBuffer(void)' being compiled
62> with
62> [
62> T=int
62> ]
62>C:\Users\icub\sb\robotology\YARP\src\libYARP_dev\src\yarp\dev\ImplementControlMode.cpp(33): note: see reference to class template instantiation 'yarp::dev::impl::FixedSizeBuffersManager<int>' being compiled
62>c:\users\icub\sb\robotology\yarp\src\libyarp_dev\src\yarp\dev\impl\FixedSizeBuffersManager-inl.h(120): warning C4267: '=': conversion from 'size_t' to 'uint32_t', possible loss of data
62>c:\users\icub\sb\robotology\yarp\src\libyarp_dev\src\yarp\dev\impl\FixedSizeBuffersManager-inl.h(130): warning C4267: '=': conversion from 'size_t' to 'uint32_t', possible loss of data
62>ImplementCurrentControl.cpp
62>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Port.h(248): warning C4996: 'yarp::os::Contactable::setCallbackLock': Use setCallbackLock with std::mutex instead
62>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Contactable.h(338): note: see declaration of 'yarp::os::Contactable::setCallbackLock'
62>c:\users\icub\sb\robotology\yarp\src\libyarp_dev\src\yarp\dev\impl\FixedSizeBuffersManager-inl.h(102): warning C4267: '=': conversion from 'size_t' to 'uint32_t', possible loss of data
62>c:\users\icub\sb\robotology\yarp\src\libyarp_dev\src\yarp\dev\impl\FixedSizeBuffersManager-inl.h(88): note: while compiling class template member function 'yarp::dev::impl::Buffer<T> yarp::dev::impl::FixedSizeBuffersManager<T>::getBuffer(void)'
62> with
62> [
62> T=double
62> ]
62>C:\Users\icub\sb\robotology\YARP\src\libYARP_dev\src\yarp\dev\ImplementCurrentControl.cpp(90): note: see reference to function template instantiation 'yarp::dev::impl::Buffer<T> yarp::dev::impl::FixedSizeBuffersManager<T>::getBuffer(void)' being compiled
62> with
62> [
62> T=double
62> ]
62>C:\Users\icub\sb\robotology\YARP\src\libYARP_dev\src\yarp\dev\ImplementCurrentControl.cpp(39): note: see reference to class template instantiation 'yarp::dev::impl::FixedSizeBuffersManager<double>' being compiled
62>c:\users\icub\sb\robotology\yarp\src\libyarp_dev\src\yarp\dev\impl\FixedSizeBuffersManager-inl.h(120): warning C4267: '=': conversion from 'size_t' to 'uint32_t', possible loss of data
62>c:\users\icub\sb\robotology\yarp\src\libyarp_dev\src\yarp\dev\impl\FixedSizeBuffersManager-inl.h(130): warning C4267: '=': conversion from 'size_t' to 'uint32_t', possible loss of data
62>ImplementEncoders.cpp
62>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Port.h(248): warning C4996: 'yarp::os::Contactable::setCallbackLock': Use setCallbackLock with std::mutex instead
62>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Contactable.h(338): note: see declaration of 'yarp::os::Contactable::setCallbackLock'
62>ImplementEncodersTimed.cpp
62>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Port.h(248): warning C4996: 'yarp::os::Contactable::setCallbackLock': Use setCallbackLock with std::mutex instead
62>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Contactable.h(338): note: see declaration of 'yarp::os::Contactable::setCallbackLock'
62>c:\users\icub\sb\robotology\yarp\src\libyarp_dev\src\yarp\dev\impl\FixedSizeBuffersManager-inl.h(102): warning C4267: '=': conversion from 'size_t' to 'uint32_t', possible loss of data
62>c:\users\icub\sb\robotology\yarp\src\libyarp_dev\src\yarp\dev\impl\FixedSizeBuffersManager-inl.h(88): note: while compiling class template member function 'yarp::dev::impl::Buffer<T> yarp::dev::impl::FixedSizeBuffersManager<T>::getBuffer(void)'
62> with
62> [
62> T=double
62> ]
62>C:\Users\icub\sb\robotology\YARP\src\libYARP_dev\src\yarp\dev\ImplementEncodersTimed.cpp(97): note: see reference to function template instantiation 'yarp::dev::impl::Buffer<T> yarp::dev::impl::FixedSizeBuffersManager<T>::getBuffer(void)' being compiled
62> with
62> [
62> T=double
62> ]
62>C:\Users\icub\sb\robotology\YARP\src\libYARP_dev\src\yarp\dev\ImplementEncodersTimed.cpp(39): note: see reference to class template instantiation 'yarp::dev::impl::FixedSizeBuffersManager<double>' being compiled
62>c:\users\icub\sb\robotology\yarp\src\libyarp_dev\src\yarp\dev\impl\FixedSizeBuffersManager-inl.h(120): warning C4267: '=': conversion from 'size_t' to 'uint32_t', possible loss of data
62>c:\users\icub\sb\robotology\yarp\src\libyarp_dev\src\yarp\dev\impl\FixedSizeBuffersManager-inl.h(130): warning C4267: '=': conversion from 'size_t' to 'uint32_t', possible loss of data
62>ImplementImpedanceControl.cpp
62>ImplementInteractionMode.cpp
62>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Port.h(248): warning C4996: 'yarp::os::Contactable::setCallbackLock': Use setCallbackLock with std::mutex instead
62>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Contactable.h(338): note: see declaration of 'yarp::os::Contactable::setCallbackLock'
62>c:\users\icub\sb\robotology\yarp\src\libyarp_dev\src\yarp\dev\impl\FixedSizeBuffersManager-inl.h(102): warning C4267: '=': conversion from 'size_t' to 'uint32_t', possible loss of data
62>c:\users\icub\sb\robotology\yarp\src\libyarp_dev\src\yarp\dev\impl\FixedSizeBuffersManager-inl.h(88): note: while compiling class template member function 'yarp::dev::impl::Buffer<T> yarp::dev::impl::FixedSizeBuffersManager<T>::getBuffer(void)'
62> with
62> [
62> T=int
62> ]
62>C:\Users\icub\sb\robotology\YARP\src\libYARP_dev\src\yarp\dev\ImplementInteractionMode.cpp(98): note: see reference to function template instantiation 'yarp::dev::impl::Buffer<T> yarp::dev::impl::FixedSizeBuffersManager<T>::getBuffer(void)' being compiled
62> with
62> [
62> T=int
62> ]
62>C:\Users\icub\sb\robotology\YARP\src\libYARP_dev\src\yarp\dev\ImplementInteractionMode.cpp(52): note: see reference to class template instantiation 'yarp::dev::impl::FixedSizeBuffersManager<int>' being compiled
62>c:\users\icub\sb\robotology\yarp\src\libyarp_dev\src\yarp\dev\impl\FixedSizeBuffersManager-inl.h(120): warning C4267: '=': conversion from 'size_t' to 'uint32_t', possible loss of data
62>c:\users\icub\sb\robotology\yarp\src\libyarp_dev\src\yarp\dev\impl\FixedSizeBuffersManager-inl.h(130): warning C4267: '=': conversion from 'size_t' to 'uint32_t', possible loss of data
62>Generating Code...
62>Compiling...
62>ImplementMotor.cpp
62>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Port.h(248): warning C4996: 'yarp::os::Contactable::setCallbackLock': Use setCallbackLock with std::mutex instead
62>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Contactable.h(338): note: see declaration of 'yarp::os::Contactable::setCallbackLock'
62>C:\Users\icub\sb\robotology\YARP\src\libYARP_dev\src\yarp\dev\ImplementMotor.cpp(134): warning C4267: 'argument': conversion from 'size_t' to 'int', possible loss of data
62>c:\users\icub\sb\robotology\yarp\src\libyarp_dev\src\yarp\dev\impl\FixedSizeBuffersManager-inl.h(102): warning C4267: '=': conversion from 'size_t' to 'uint32_t', possible loss of data
62>c:\users\icub\sb\robotology\yarp\src\libyarp_dev\src\yarp\dev\impl\FixedSizeBuffersManager-inl.h(88): note: while compiling class template member function 'yarp::dev::impl::Buffer<T> yarp::dev::impl::FixedSizeBuffersManager<T>::getBuffer(void)'
62> with
62> [
62> T=double
62> ]
62>C:\Users\icub\sb\robotology\YARP\src\libYARP_dev\src\yarp\dev\ImplementMotor.cpp(129): note: see reference to function template instantiation 'yarp::dev::impl::Buffer<T> yarp::dev::impl::FixedSizeBuffersManager<T>::getBuffer(void)' being compiled
62> with
62> [
62> T=double
62> ]
62>C:\Users\icub\sb\robotology\YARP\src\libYARP_dev\src\yarp\dev\ImplementMotor.cpp(39): note: see reference to class template instantiation 'yarp::dev::impl::FixedSizeBuffersManager<double>' being compiled
62>c:\users\icub\sb\robotology\yarp\src\libyarp_dev\src\yarp\dev\impl\FixedSizeBuffersManager-inl.h(120): warning C4267: '=': conversion from 'size_t' to 'uint32_t', possible loss of data
62>c:\users\icub\sb\robotology\yarp\src\libyarp_dev\src\yarp\dev\impl\FixedSizeBuffersManager-inl.h(130): warning C4267: '=': conversion from 'size_t' to 'uint32_t', possible loss of data
62>ImplementMotorEncoders.cpp
62>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Port.h(248): warning C4996: 'yarp::os::Contactable::setCallbackLock': Use setCallbackLock with std::mutex instead
62>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Contactable.h(338): note: see declaration of 'yarp::os::Contactable::setCallbackLock'
62>c:\users\icub\sb\robotology\yarp\src\libyarp_dev\src\yarp\dev\impl\FixedSizeBuffersManager-inl.h(102): warning C4267: '=': conversion from 'size_t' to 'uint32_t', possible loss of data
62>c:\users\icub\sb\robotology\yarp\src\libyarp_dev\src\yarp\dev\impl\FixedSizeBuffersManager-inl.h(88): note: while compiling class template member function 'yarp::dev::impl::Buffer<T> yarp::dev::impl::FixedSizeBuffersManager<T>::getBuffer(void)'
62> with
62> [
62> T=double
62> ]
62>C:\Users\icub\sb\robotology\YARP\src\libYARP_dev\src\yarp\dev\ImplementMotorEncoders.cpp(120): note: see reference to function template instantiation 'yarp::dev::impl::Buffer<T> yarp::dev::impl::FixedSizeBuffersManager<T>::getBuffer(void)' being compiled
62> with
62> [
62> T=double
62> ]
62>C:\Users\icub\sb\robotology\YARP\src\libYARP_dev\src\yarp\dev\ImplementMotorEncoders.cpp(40): note: see reference to class template instantiation 'yarp::dev::impl::FixedSizeBuffersManager<double>' being compiled
62>c:\users\icub\sb\robotology\yarp\src\libyarp_dev\src\yarp\dev\impl\FixedSizeBuffersManager-inl.h(120): warning C4267: '=': conversion from 'size_t' to 'uint32_t', possible loss of data
62>c:\users\icub\sb\robotology\yarp\src\libyarp_dev\src\yarp\dev\impl\FixedSizeBuffersManager-inl.h(130): warning C4267: '=': conversion from 'size_t' to 'uint32_t', possible loss of data
62>ImplementPWMControl.cpp
62>c:\users\icub\sb\robotology\yarp\src\libyarp_dev\src\yarp\dev\impl\FixedSizeBuffersManager-inl.h(102): warning C4267: '=': conversion from 'size_t' to 'uint32_t', possible loss of data
62>c:\users\icub\sb\robotology\yarp\src\libyarp_dev\src\yarp\dev\impl\FixedSizeBuffersManager-inl.h(88): note: while compiling class template member function 'yarp::dev::impl::Buffer<T> yarp::dev::impl::FixedSizeBuffersManager<T>::getBuffer(void)'
62> with
62> [
62> T=double
62> ]
62>C:\Users\icub\sb\robotology\YARP\src\libYARP_dev\src\yarp\dev\ImplementPWMControl.cpp(79): note: see reference to function template instantiation 'yarp::dev::impl::Buffer<T> yarp::dev::impl::FixedSizeBuffersManager<T>::getBuffer(void)' being compiled
62> with
62> [
62> T=double
62> ]
62>C:\Users\icub\sb\robotology\YARP\src\libYARP_dev\src\yarp\dev\ImplementPWMControl.cpp(35): note: see reference to class template instantiation 'yarp::dev::impl::FixedSizeBuffersManager<double>' being compiled
62>c:\users\icub\sb\robotology\yarp\src\libyarp_dev\src\yarp\dev\impl\FixedSizeBuffersManager-inl.h(120): warning C4267: '=': conversion from 'size_t' to 'uint32_t', possible loss of data
62>c:\users\icub\sb\robotology\yarp\src\libyarp_dev\src\yarp\dev\impl\FixedSizeBuffersManager-inl.h(130): warning C4267: '=': conversion from 'size_t' to 'uint32_t', possible loss of data
62>ImplementPidControl.cpp
62>c:\users\icub\sb\robotology\yarp\src\libyarp_dev\src\yarp\dev\impl\FixedSizeBuffersManager-inl.h(102): warning C4267: '=': conversion from 'size_t' to 'uint32_t', possible loss of data
62>c:\users\icub\sb\robotology\yarp\src\libyarp_dev\src\yarp\dev\impl\FixedSizeBuffersManager-inl.h(88): note: while compiling class template member function 'yarp::dev::impl::Buffer<T> yarp::dev::impl::FixedSizeBuffersManager<T>::getBuffer(void)'
62> with
62> [
62> T=double
62> ]
62>C:\Users\icub\sb\robotology\YARP\src\libYARP_dev\src\yarp\dev\ImplementPidControl.cpp(120): note: see reference to function template instantiation 'yarp::dev::impl::Buffer<T> yarp::dev::impl::FixedSizeBuffersManager<T>::getBuffer(void)' being compiled
62> with
62> [
62> T=double
62> ]
62>C:\Users\icub\sb\robotology\YARP\src\libYARP_dev\src\yarp\dev\ImplementPidControl.cpp(42): note: see reference to class template instantiation 'yarp::dev::impl::FixedSizeBuffersManager<double>' being compiled
62>c:\users\icub\sb\robotology\yarp\src\libyarp_dev\src\yarp\dev\impl\FixedSizeBuffersManager-inl.h(120): warning C4267: '=': conversion from 'size_t' to 'uint32_t', possible loss of data
62>c:\users\icub\sb\robotology\yarp\src\libyarp_dev\src\yarp\dev\impl\FixedSizeBuffersManager-inl.h(130): warning C4267: '=': conversion from 'size_t' to 'uint32_t', possible loss of data
62>ImplementPositionControl.cpp
62>c:\users\icub\sb\robotology\yarp\src\libyarp_dev\src\yarp\dev\impl\FixedSizeBuffersManager-inl.h(102): warning C4267: '=': conversion from 'size_t' to 'uint32_t', possible loss of data
62>c:\users\icub\sb\robotology\yarp\src\libyarp_dev\src\yarp\dev\impl\FixedSizeBuffersManager-inl.h(88): note: while compiling class template member function 'yarp::dev::impl::Buffer<T> yarp::dev::impl::FixedSizeBuffersManager<T>::getBuffer(void)'
62> with
62> [
62> T=int
62> ]
62>C:\Users\icub\sb\robotology\YARP\src\libYARP_dev\src\yarp\dev\ImplementPositionControl.cpp(109): note: see reference to function template instantiation 'yarp::dev::impl::Buffer<T> yarp::dev::impl::FixedSizeBuffersManager<T>::getBuffer(void)' being compiled
62> with
62> [
62> T=int
62> ]
62>C:\Users\icub\sb\robotology\YARP\src\libYARP_dev\src\yarp\dev\ImplementPositionControl.cpp(50): note: see reference to class template instantiation 'yarp::dev::impl::FixedSizeBuffersManager<int>' being compiled
62>c:\users\icub\sb\robotology\yarp\src\libyarp_dev\src\yarp\dev\impl\FixedSizeBuffersManager-inl.h(120): warning C4267: '=': conversion from 'size_t' to 'uint32_t', possible loss of data
62>c:\users\icub\sb\robotology\yarp\src\libyarp_dev\src\yarp\dev\impl\FixedSizeBuffersManager-inl.h(130): warning C4267: '=': conversion from 'size_t' to 'uint32_t', possible loss of data
62>ImplementPositionDirect.cpp
62>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Port.h(248): warning C4996: 'yarp::os::Contactable::setCallbackLock': Use setCallbackLock with std::mutex instead
62>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Contactable.h(338): note: see declaration of 'yarp::os::Contactable::setCallbackLock'
62>c:\users\icub\sb\robotology\yarp\src\libyarp_dev\src\yarp\dev\impl\FixedSizeBuffersManager-inl.h(102): warning C4267: '=': conversion from 'size_t' to 'uint32_t', possible loss of data
62>c:\users\icub\sb\robotology\yarp\src\libyarp_dev\src\yarp\dev\impl\FixedSizeBuffersManager-inl.h(88): note: while compiling class template member function 'yarp::dev::impl::Buffer<T> yarp::dev::impl::FixedSizeBuffersManager<T>::getBuffer(void)'
62> with
62> [
62> T=double
62> ]
62>C:\Users\icub\sb\robotology\YARP\src\libYARP_dev\src\yarp\dev\ImplementPositionDirect.cpp(95): note: see reference to function template instantiation 'yarp::dev::impl::Buffer<T> yarp::dev::impl::FixedSizeBuffersManager<T>::getBuffer(void)' being compiled
62> with
62> [
62> T=double
62> ]
62>C:\Users\icub\sb\robotology\YARP\src\libYARP_dev\src\yarp\dev\ImplementPositionDirect.cpp(45): note: see reference to class template instantiation 'yarp::dev::impl::FixedSizeBuffersManager<double>' being compiled
62>c:\users\icub\sb\robotology\yarp\src\libyarp_dev\src\yarp\dev\impl\FixedSizeBuffersManager-inl.h(120): warning C4267: '=': conversion from 'size_t' to 'uint32_t', possible loss of data
62>c:\users\icub\sb\robotology\yarp\src\libyarp_dev\src\yarp\dev\impl\FixedSizeBuffersManager-inl.h(130): warning C4267: '=': conversion from 'size_t' to 'uint32_t', possible loss of data
62>ImplementRemoteVariables.cpp
62>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Port.h(248): warning C4996: 'yarp::os::Contactable::setCallbackLock': Use setCallbackLock with std::mutex instead
62>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Contactable.h(338): note: see declaration of 'yarp::os::Contactable::setCallbackLock'
62>ImplementTorqueControl.cpp
62>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Port.h(248): warning C4996: 'yarp::os::Contactable::setCallbackLock': Use setCallbackLock with std::mutex instead
62>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Contactable.h(338): note: see declaration of 'yarp::os::Contactable::setCallbackLock'
62>c:\users\icub\sb\robotology\yarp\src\libyarp_dev\src\yarp\dev\impl\FixedSizeBuffersManager-inl.h(102): warning C4267: '=': conversion from 'size_t' to 'uint32_t', possible loss of data
62>c:\users\icub\sb\robotology\yarp\src\libyarp_dev\src\yarp\dev\impl\FixedSizeBuffersManager-inl.h(88): note: while compiling class template member function 'yarp::dev::impl::Buffer<T> yarp::dev::impl::FixedSizeBuffersManager<T>::getBuffer(void)'
62> with
62> [
62> T=double
62> ]
62>C:\Users\icub\sb\robotology\YARP\src\libYARP_dev\src\yarp\dev\ImplementTorqueControl.cpp(124): note: see reference to function template instantiation 'yarp::dev::impl::Buffer<T> yarp::dev::impl::FixedSizeBuffersManager<T>::getBuffer(void)' being compiled
62> with
62> [
62> T=double
62> ]
62>C:\Users\icub\sb\robotology\YARP\src\libYARP_dev\src\yarp\dev\ImplementTorqueControl.cpp(42): note: see reference to class template instantiation 'yarp::dev::impl::FixedSizeBuffersManager<double>' being compiled
62>c:\users\icub\sb\robotology\yarp\src\libyarp_dev\src\yarp\dev\impl\FixedSizeBuffersManager-inl.h(120): warning C4267: '=': conversion from 'size_t' to 'uint32_t', possible loss of data
62>c:\users\icub\sb\robotology\yarp\src\libyarp_dev\src\yarp\dev\impl\FixedSizeBuffersManager-inl.h(130): warning C4267: '=': conversion from 'size_t' to 'uint32_t', possible loss of data
62>ImplementVelocityControl.cpp
62>c:\users\icub\sb\robotology\yarp\src\libyarp_dev\src\yarp\dev\impl\FixedSizeBuffersManager-inl.h(102): warning C4267: '=': conversion from 'size_t' to 'uint32_t', possible loss of data
62>c:\users\icub\sb\robotology\yarp\src\libyarp_dev\src\yarp\dev\impl\FixedSizeBuffersManager-inl.h(88): note: while compiling class template member function 'yarp::dev::impl::Buffer<T> yarp::dev::impl::FixedSizeBuffersManager<T>::getBuffer(void)'
62> with
62> [
62> T=int
62> ]
62>C:\Users\icub\sb\robotology\YARP\src\libYARP_dev\src\yarp\dev\ImplementVelocityControl.cpp(92): note: see reference to function template instantiation 'yarp::dev::impl::Buffer<T> yarp::dev::impl::FixedSizeBuffersManager<T>::getBuffer(void)' being compiled
62> with
62> [
62> T=int
62> ]
62>C:\Users\icub\sb\robotology\YARP\src\libYARP_dev\src\yarp\dev\ImplementVelocityControl.cpp(40): note: see reference to class template instantiation 'yarp::dev::impl::FixedSizeBuffersManager<int>' being compiled
62>c:\users\icub\sb\robotology\yarp\src\libyarp_dev\src\yarp\dev\impl\FixedSizeBuffersManager-inl.h(120): warning C4267: '=': conversion from 'size_t' to 'uint32_t', possible loss of data
62>c:\users\icub\sb\robotology\yarp\src\libyarp_dev\src\yarp\dev\impl\FixedSizeBuffersManager-inl.h(130): warning C4267: '=': conversion from 'size_t' to 'uint32_t', possible loss of data
62>ImplementVirtualAnalogSensor.cpp
62>LaserMeasurementData.cpp
62>MultipleAnalogSensorsInterfaces.cpp
62>PolyDriver.cpp
62>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Port.h(248): warning C4996: 'yarp::os::Contactable::setCallbackLock': Use setCallbackLock with std::mutex instead
62>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Contactable.h(338): note: see declaration of 'yarp::os::Contactable::setCallbackLock'
62>PolyDriverDescriptor.cpp
62>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Port.h(248): warning C4996: 'yarp::os::Contactable::setCallbackLock': Use setCallbackLock with std::mutex instead
62>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Contactable.h(338): note: see declaration of 'yarp::os::Contactable::setCallbackLock'
62>PolyDriverList.cpp
62>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Port.h(248): warning C4996: 'yarp::os::Contactable::setCallbackLock': Use setCallbackLock with std::mutex instead
62>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Contactable.h(338): note: see declaration of 'yarp::os::Contactable::setCallbackLock'
62>RGBDSensorParamParser.cpp
62>IFrameTransform.cpp
62>IFrameTransformClientControl.cpp
62>IMap2D.cpp
62>C:\Users\icub\sb\robotology\YARP\src\libYARP_dev\src\yarp/dev/MapGrid2D.h(44): warning C4251: 'yarp::dev::MapGrid2D::m_map_occupancy': class 'yarp::sig::ImageOf<yarp::sig::PixelMono>' needs to have dll-interface to be used by clients of class 'yarp::dev::MapGrid2D'
62>C:\Users\icub\sb\robotology\YARP\src\libYARP_sig\src\yarp/sig/Image.h(632): note: see declaration of 'yarp::sig::ImageOf<yarp::sig::PixelMono>'
62>C:\Users\icub\sb\robotology\YARP\src\libYARP_dev\src\yarp/dev/MapGrid2D.h(45): warning C4251: 'yarp::dev::MapGrid2D::m_map_flags': class 'yarp::sig::ImageOf<yarp::sig::PixelMono>' needs to have dll-interface to be used by clients of class 'yarp::dev::MapGrid2D'
62>C:\Users\icub\sb\robotology\YARP\src\libYARP_sig\src\yarp/sig/Image.h(632): note: see declaration of 'yarp::sig::ImageOf<yarp::sig::PixelMono>'
62>C:\Users\icub\sb\robotology\YARP\src\libYARP_dev\src\yarp/dev/Map2DLocation.h(101): warning C4251: 'yarp::dev::Map2DLocation::map_id': class 'std::basic_string<char,std::char_traits<char>,std::allocator<char>>' needs to have dll-interface to be used by clients of struct 'yarp::dev::Map2DLocation'
62>C:\Program Files (x86)\Microsoft Visual Studio\2017\Enterprise\VC\Tools\MSVC\14.16.27023\include\xstring(4373): note: see declaration of 'std::basic_string<char,std::char_traits<char>,std::allocator<char>>'
62>C:\Users\icub\sb\robotology\YARP\src\libYARP_dev\src\yarp/dev/Map2DArea.h(96): warning C4251: 'yarp::dev::Map2DArea::map_id': class 'std::basic_string<char,std::char_traits<char>,std::allocator<char>>' needs to have dll-interface to be used by clients of class 'yarp::dev::Map2DArea'
62>C:\Program Files (x86)\Microsoft Visual Studio\2017\Enterprise\VC\Tools\MSVC\14.16.27023\include\xstring(4373): note: see declaration of 'std::basic_string<char,std::char_traits<char>,std::allocator<char>>'
62>C:\Users\icub\sb\robotology\YARP\src\libYARP_dev\src\yarp/dev/Map2DArea.h(97): warning C4251: 'yarp::dev::Map2DArea::points': class 'std::vector<yarp::math::Vec2D<double>,std::allocator<_Ty>>' needs to have dll-interface to be used by clients of class 'yarp::dev::Map2DArea'
62> with
62> [
62> _Ty=yarp::math::Vec2D<double>
62> ]
62>C:\Users\icub\sb\robotology\YARP\src\libYARP_dev\src\yarp/dev/Map2DArea.h(35): note: see declaration of 'std::vector<yarp::math::Vec2D<double>,std::allocator<_Ty>>'
62> with
62> [
62> _Ty=yarp::math::Vec2D<double>
62> ]
62>INavigation2D.cpp
62>C:\Users\icub\sb\robotology\YARP\src\libYARP_dev\src\yarp/dev/Map2DLocation.h(101): warning C4251: 'yarp::dev::Map2DLocation::map_id': class 'std::basic_string<char,std::char_traits<char>,std::allocator<char>>' needs to have dll-interface to be used by clients of struct 'yarp::dev::Map2DLocation'
62>C:\Program Files (x86)\Microsoft Visual Studio\2017\Enterprise\VC\Tools\MSVC\14.16.27023\include\xstring(4373): note: see declaration of 'std::basic_string<char,std::char_traits<char>,std::allocator<char>>'
62>C:\Users\icub\sb\robotology\YARP\src\libYARP_dev\src\yarp/dev/Map2DArea.h(96): warning C4251: 'yarp::dev::Map2DArea::map_id': class 'std::basic_string<char,std::char_traits<char>,std::allocator<char>>' needs to have dll-interface to be used by clients of class 'yarp::dev::Map2DArea'
62>C:\Program Files (x86)\Microsoft Visual Studio\2017\Enterprise\VC\Tools\MSVC\14.16.27023\include\xstring(4373): note: see declaration of 'std::basic_string<char,std::char_traits<char>,std::allocator<char>>'
62>C:\Users\icub\sb\robotology\YARP\src\libYARP_dev\src\yarp/dev/Map2DArea.h(97): warning C4251: 'yarp::dev::Map2DArea::points': class 'std::vector<yarp::math::Vec2D<double>,std::allocator<_Ty>>' needs to have dll-interface to be used by clients of class 'yarp::dev::Map2DArea'
62> with
62> [
62> _Ty=yarp::math::Vec2D<double>
62> ]
62>C:\Users\icub\sb\robotology\YARP\src\libYARP_dev\src\yarp/dev/Map2DArea.h(35): note: see declaration of 'std::vector<yarp::math::Vec2D<double>,std::allocator<_Ty>>'
62> with
62> [
62> _Ty=yarp::math::Vec2D<double>
62> ]
62>C:\Users\icub\sb\robotology\YARP\src\libYARP_dev\src\yarp/dev/MapGrid2D.h(44): warning C4251: 'yarp::dev::MapGrid2D::m_map_occupancy': class 'yarp::sig::ImageOf<yarp::sig::PixelMono>' needs to have dll-interface to be used by clients of class 'yarp::dev::MapGrid2D'
62>C:\Users\icub\sb\robotology\YARP\src\libYARP_sig\src\yarp/sig/Image.h(632): note: see declaration of 'yarp::sig::ImageOf<yarp::sig::PixelMono>'
62>C:\Users\icub\sb\robotology\YARP\src\libYARP_dev\src\yarp/dev/MapGrid2D.h(45): warning C4251: 'yarp::dev::MapGrid2D::m_map_flags': class 'yarp::sig::ImageOf<yarp::sig::PixelMono>' needs to have dll-interface to be used by clients of class 'yarp::dev::MapGrid2D'
62>C:\Users\icub\sb\robotology\YARP\src\libYARP_sig\src\yarp/sig/Image.h(632): note: see declaration of 'yarp::sig::ImageOf<yarp::sig::PixelMono>'
62>Generating Code...
62>Compiling...
62>MapGrid2D.cpp
62>C:\Users\icub\sb\robotology\YARP\src\libYARP_dev\src\yarp/dev/MapGrid2D.h(44): warning C4251: 'yarp::dev::MapGrid2D::m_map_occupancy': class 'yarp::sig::ImageOf<yarp::sig::PixelMono>' needs to have dll-interface to be used by clients of class 'yarp::dev::MapGrid2D'
62>C:\Users\icub\sb\robotology\YARP\src\libYARP_sig\src\yarp/sig/Image.h(632): note: see declaration of 'yarp::sig::ImageOf<yarp::sig::PixelMono>'
62>C:\Users\icub\sb\robotology\YARP\src\libYARP_dev\src\yarp/dev/MapGrid2D.h(45): warning C4251: 'yarp::dev::MapGrid2D::m_map_flags': class 'yarp::sig::ImageOf<yarp::sig::PixelMono>' needs to have dll-interface to be used by clients of class 'yarp::dev::MapGrid2D'
62>C:\Users\icub\sb\robotology\YARP\src\libYARP_sig\src\yarp/sig/Image.h(632): note: see declaration of 'yarp::sig::ImageOf<yarp::sig::PixelMono>'
62>C:\Users\icub\sb\robotology\YARP\src\libYARP_dev\src\yarp\dev\MapGrid2D.cpp(39): warning C4267: 'initializing': conversion from 'size_t' to 'int', possible loss of data
62>C:\Users\icub\sb\robotology\YARP\src\libYARP_dev\src\yarp\dev\MapGrid2D.cpp(589): warning C4267: '=': conversion from 'size_t' to 'int', possible loss of data
62>C:\Users\icub\sb\robotology\YARP\src\libYARP_dev\src\yarp\dev\MapGrid2D.cpp(599): warning C4267: 'initializing': conversion from 'size_t' to 'int', possible loss of data
62>C:\Users\icub\sb\robotology\YARP\src\libYARP_dev\src\yarp\dev\MapGrid2D.cpp(600): warning C4267: 'initializing': conversion from 'size_t' to 'int', possible loss of data
62>C:\Users\icub\sb\robotology\YARP\src\libYARP_dev\src\yarp\dev\MapGrid2D.cpp(619): warning C4267: '=': conversion from 'size_t' to 'int', possible loss of data
62>C:\Users\icub\sb\robotology\YARP\src\libYARP_dev\src\yarp\dev\MapGrid2D.cpp(634): warning C4267: '=': conversion from 'size_t' to 'int', possible loss of data
62>C:\Users\icub\sb\robotology\YARP\src\libYARP_dev\src\yarp\dev\MapGrid2D.cpp(783): warning C4267: 'argument': conversion from 'size_t' to 'int32_t', possible loss of data
62>C:\Users\icub\sb\robotology\YARP\src\libYARP_dev\src\yarp\dev\MapGrid2D.cpp(785): warning C4267: 'argument': conversion from 'size_t' to 'int32_t', possible loss of data
62>C:\Users\icub\sb\robotology\YARP\src\libYARP_dev\src\yarp\dev\MapGrid2D.cpp(800): warning C4267: '=': conversion from 'size_t' to 'int', possible loss of data
62>C:\Users\icub\sb\robotology\YARP\src\libYARP_dev\src\yarp\dev\MapGrid2D.cpp(805): warning C4267: '=': conversion from 'size_t' to 'int', possible loss of data
62>C:\Users\icub\sb\robotology\YARP\src\libYARP_dev\src\yarp\dev\MapGrid2D.cpp(833): warning C4267: '=': conversion from 'size_t' to 'T', possible loss of data
62> with
62> [
62> T=int
62> ]
62>C:\Users\icub\sb\robotology\YARP\src\libYARP_dev\src\yarp\dev\MapGrid2D.cpp(865): warning C4267: 'argument': conversion from 'size_t' to 'const T', possible loss of data
62> with
62> [
62> T=int
62> ]
62>C:\Program Files (x86)\Microsoft Visual Studio\2017\Enterprise\VC\Tools\MSVC\14.16.27023\include\xmemory0(881): warning C4267: 'argument': conversion from 'size_t' to 'const T', possible loss of data
62> with
62> [
62> T=int
62> ]
62>C:\Program Files (x86)\Microsoft Visual Studio\2017\Enterprise\VC\Tools\MSVC\14.16.27023\include\vector(902): note: see reference to function template instantiation 'void std::_Default_allocator_traits<_Alloc>::construct<_Ty,size_t&,size_t&>(_Alloc &,_Objty *const ,size_t &,size_t &)' being compiled
62> with
62> [
62> _Alloc=std::allocator<yarp::dev::MapGrid2D::XYCell>,
62> _Ty=yarp::math::Vec2D<int>,
62> _Objty=yarp::math::Vec2D<int>
62> ]
62>C:\Program Files (x86)\Microsoft Visual Studio\2017\Enterprise\VC\Tools\MSVC\14.16.27023\include\vector(902): note: see reference to function template instantiation 'void std::_Default_allocator_traits<_Alloc>::construct<_Ty,size_t&,size_t&>(_Alloc &,_Objty *const ,size_t &,size_t &)' being compiled
62> with
62> [
62> _Alloc=std::allocator<yarp::dev::MapGrid2D::XYCell>,
62> _Ty=yarp::math::Vec2D<int>,
62> _Objty=yarp::math::Vec2D<int>
62> ]
62>C:\Program Files (x86)\Microsoft Visual Studio\2017\Enterprise\VC\Tools\MSVC\14.16.27023\include\vector(919): note: see reference to function template instantiation 'void std::vector<yarp::dev::MapGrid2D::XYCell,std::allocator<_Ty>>::_Emplace_back_with_unused_capacity<size_t&,size_t&>(size_t &,size_t &)' being compiled
62> with
62> [
62> _Ty=yarp::dev::MapGrid2D::XYCell
62> ]
62>C:\Users\icub\sb\robotology\YARP\src\libYARP_dev\src\yarp\dev\MapGrid2D.cpp(206): note: see reference to function template instantiation 'void std::vector<yarp::dev::MapGrid2D::XYCell,std::allocator<_Ty>>::emplace_back<size_t&,size_t&>(size_t &,size_t &)' being compiled
62> with
62> [
62> _Ty=yarp::dev::MapGrid2D::XYCell
62> ]
62>Map2DArea.cpp
62>C:\Users\icub\sb\robotology\YARP\src\libYARP_dev\src\yarp/dev/Map2DLocation.h(101): warning C4251: 'yarp::dev::Map2DLocation::map_id': class 'std::basic_string<char,std::char_traits<char>,std::allocator<char>>' needs to have dll-interface to be used by clients of struct 'yarp::dev::Map2DLocation'
62>C:\Program Files (x86)\Microsoft Visual Studio\2017\Enterprise\VC\Tools\MSVC\14.16.27023\include\xstring(4373): note: see declaration of 'std::basic_string<char,std::char_traits<char>,std::allocator<char>>'
62>C:\Users\icub\sb\robotology\YARP\src\libYARP_dev\src\yarp/dev/Map2DArea.h(96): warning C4251: 'yarp::dev::Map2DArea::map_id': class 'std::basic_string<char,std::char_traits<char>,std::allocator<char>>' needs to have dll-interface to be used by clients of class 'yarp::dev::Map2DArea'
62>C:\Program Files (x86)\Microsoft Visual Studio\2017\Enterprise\VC\Tools\MSVC\14.16.27023\include\xstring(4373): note: see declaration of 'std::basic_string<char,std::char_traits<char>,std::allocator<char>>'
62>C:\Users\icub\sb\robotology\YARP\src\libYARP_dev\src\yarp/dev/Map2DArea.h(97): warning C4251: 'yarp::dev::Map2DArea::points': class 'std::vector<yarp::math::Vec2D<double>,std::allocator<_Ty>>' needs to have dll-interface to be used by clients of class 'yarp::dev::Map2DArea'
62> with
62> [
62> _Ty=yarp::math::Vec2D<double>
62> ]
62>C:\Users\icub\sb\robotology\YARP\src\libYARP_dev\src\yarp/dev/Map2DArea.h(35): note: see declaration of 'std::vector<yarp::math::Vec2D<double>,std::allocator<_Ty>>'
62> with
62> [
62> _Ty=yarp::math::Vec2D<double>
62> ]
62>C:\Users\icub\sb\robotology\YARP\src\libYARP_dev\src\yarp\dev\Map2DArea.cpp(114): warning C4267: 'argument': conversion from 'size_t' to 'int32_t', possible loss of data
62>C:\Users\icub\sb\robotology\YARP\src\libYARP_dev\src\yarp\dev\Map2DArea.cpp(120): warning C4267: 'argument': conversion from 'size_t' to 'int32_t', possible loss of data
62>jointData.cpp
62>C:\Users\icub\sb\robotology\YARP\src\libYARP_dev\src\idl_generated_code\yarp/dev/impl/jointData.h(50): warning C4251: 'yarp::dev::impl::jointData::controlMode': class 'yarp::sig::VectorOf<int>' needs to have dll-interface to be used by clients of class 'yarp::dev::impl::jointData'
62>C:\Users\icub\sb\robotology\YARP\src\libYARP_dev\src\idl_generated_code\yarp/dev/impl/jointData.h(50): note: see declaration of 'yarp::sig::VectorOf<int>'
62>C:\Users\icub\sb\robotology\YARP\src\libYARP_dev\src\idl_generated_code\yarp/dev/impl/jointData.h(52): warning C4251: 'yarp::dev::impl::jointData::interactionMode': class 'yarp::sig::VectorOf<int>' needs to have dll-interface to be used by clients of class 'yarp::dev::impl::jointData'
62>C:\Users\icub\sb\robotology\YARP\src\libYARP_dev\src\idl_generated_code\yarp/dev/impl/jointData.h(50): note: see declaration of 'yarp::sig::VectorOf<int>'
62>audioBufferSizeData.cpp
62>Generating Code...
62> Creating library C:/Users/icub/sb/build/robotology/YARP/lib/Release/YARP_dev.lib and object C:/Users/icub/sb/build/robotology/YARP/lib/Release/YARP_dev.exp
62>YARP_dev.vcxproj -> C:\Users\icub\sb\build\robotology\YARP\bin\Release\YARP_dev.dll
62>Done building project "YARP_dev.vcxproj".
63>------ Build started: Project: yarpdev, Configuration: Release x64 ------
64>------ Build started: Project: yarplaserscannergui, Configuration: Release x64 ------
65>------ Build started: Project: yarpmotorgui, Configuration: Release x64 ------
66>------ Build started: Project: yarprobotinterface, Configuration: Release x64 ------
67>------ Build started: Project: yarp_RGBDSensorWrapper, Configuration: Release x64 ------
68>------ Build started: Project: yarp_AudioPlayerWrapper, Configuration: Release x64 ------
69>------ Build started: Project: yarp_AudioRecorderWrapper, Configuration: Release x64 ------
70>------ Build started: Project: yarp_JoypadControlClient, Configuration: Release x64 ------
65>Automatic MOC for target yarpmotorgui
64>Automatic MOC for target yarplaserscannergui
63>Building Custom Rule C:/Users/icub/sb/robotology/YARP/src/yarpdev/CMakeLists.txt
66>Building Custom Rule C:/Users/icub/sb/robotology/YARP/src/yarprobotinterface/CMakeLists.txt
67>Building Custom Rule C:/Users/icub/sb/robotology/YARP/src/devices/RGBDSensorWrapper/CMakeLists.txt
68>Building Custom Rule C:/Users/icub/sb/robotology/YARP/src/devices/audioPlayerWrapper/CMakeLists.txt
69>Building Custom Rule C:/Users/icub/sb/robotology/YARP/src/devices/audioRecorderWrapper/CMakeLists.txt
66>CMake does not need to re-run because C:/Users/icub/sb/build/robotology/YARP/src/yarprobotinterface/CMakeFiles/generate.stamp is up-to-date.
63>CMake does not need to re-run because C:/Users/icub/sb/build/robotology/YARP/src/yarpdev/CMakeFiles/generate.stamp is up-to-date.
67>CMake does not need to re-run because C:/Users/icub/sb/build/robotology/YARP/src/devices/RGBDSensorWrapper/CMakeFiles/generate.stamp is up-to-date.
69>CMake does not need to re-run because C:/Users/icub/sb/build/robotology/YARP/src/devices/audioRecorderWrapper/CMakeFiles/generate.stamp is up-to-date.
68>CMake does not need to re-run because C:/Users/icub/sb/build/robotology/YARP/src/devices/audioPlayerWrapper/CMakeFiles/generate.stamp is up-to-date.
64>Building Custom Rule C:/Users/icub/sb/robotology/YARP/src/yarplaserscannergui/CMakeLists.txt
63>yarpdev.cpp
67>yarp_plugin_yarpmod_RGBDSensorWrapper.cpp
64>CMake does not need to re-run because C:/Users/icub/sb/build/robotology/YARP/src/yarplaserscannergui/CMakeFiles/generate.stamp is up-to-date.
68>yarp_plugin_yarpmod_AudioPlayerWrapper.cpp
66>main.cpp
69>yarp_plugin_yarpmod_AudioRecorderWrapper.cpp
70>Building Custom Rule C:/Users/icub/sb/robotology/YARP/src/devices/JoypadControlClient/CMakeLists.txt
64>main.cpp
70>CMake does not need to re-run because C:/Users/icub/sb/build/robotology/YARP/src/devices/JoypadControlClient/CMakeFiles/generate.stamp is up-to-date.
63>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Port.h(248): warning C4996: 'yarp::os::Contactable::setCallbackLock': Use setCallbackLock with std::mutex instead
63>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Contactable.h(338): note: see declaration of 'yarp::os::Contactable::setCallbackLock'
66>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Port.h(248): warning C4996: 'yarp::os::Contactable::setCallbackLock': Use setCallbackLock with std::mutex instead
67>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Port.h(248): warning C4996: 'yarp::os::Contactable::setCallbackLock': Use setCallbackLock with std::mutex instead
67>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Contactable.h(338): note: see declaration of 'yarp::os::Contactable::setCallbackLock'
66>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Contactable.h(338): note: see declaration of 'yarp::os::Contactable::setCallbackLock'
66>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/AbstractContactable.h(148): warning C4996: 'yarp::os::Contactable::setCallbackLock': Use setCallbackLock with std::mutex instead
66>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Contactable.h(338): note: see declaration of 'yarp::os::Contactable::setCallbackLock'
69>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Port.h(248): warning C4996: 'yarp::os::Contactable::setCallbackLock': Use setCallbackLock with std::mutex instead
69>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Contactable.h(338): note: see declaration of 'yarp::os::Contactable::setCallbackLock'
68>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Port.h(248): warning C4996: 'yarp::os::Contactable::setCallbackLock': Use setCallbackLock with std::mutex instead
70>yarp_plugin_yarpmod_JoypadControlClient.cpp
68>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Contactable.h(338): note: see declaration of 'yarp::os::Contactable::setCallbackLock'
67>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/AbstractContactable.h(148): warning C4996: 'yarp::os::Contactable::setCallbackLock': Use setCallbackLock with std::mutex instead
67>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Contactable.h(338): note: see declaration of 'yarp::os::Contactable::setCallbackLock'
67>C:\Users\icub\sb\robotology\YARP\src\devices\RGBDSensorWrapper\RGBDSensorWrapper.h(40): fatal error C1083: Cannot open include file: 'yarp/rosmsg/TickTime.h': No such file or directory
67>RGBDSensorWrapper.cpp
68>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/BufferedPort.h(290): warning C4996: 'yarp::os::Contactable::setCallbackLock': Use setCallbackLock with std::mutex instead
68>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Contactable.h(338): note: see declaration of 'yarp::os::Contactable::setCallbackLock'
68>C:\Users\icub\sb\robotology\YARP\src\devices\audioPlayerWrapper\AudioPlayerWrapper.h(94): note: see reference to class template instantiation 'yarp::os::BufferedPort<yarp::sig::Sound>' being compiled
68>C:\Users\icub\sb\build\robotology\YARP\src\devices\audioPlayerWrapper\yarp_plugin_yarpmod_AudioPlayerWrapper.cpp(33): warning C4267: 'return': conversion from 'size_t' to 'int', possible loss of data
69>C:\Users\icub\sb\build\robotology\YARP\src\devices\audioRecorderWrapper\yarp_plugin_yarpmod_AudioRecorderWrapper.cpp(33): warning C4267: 'return': conversion from 'size_t' to 'int', possible loss of data
66>Action.cpp
69>AudioRecorderWrapper.cpp
68>AudioPlayerWrapper.cpp
65>Generating qrc_res.cpp
63>yarpdev.vcxproj -> C:\Users\icub\sb\build\robotology\YARP\bin\Release\yarpdev.exe
70>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Port.h(248): warning C4996: 'yarp::os::Contactable::setCallbackLock': Use setCallbackLock with std::mutex instead
65>Generating ui_jointitem.h
65>C:\Program Files (x86)\Microsoft Visual Studio\2017\Enterprise\Common7\IDE\VC\VCTargets\Microsoft.CppCommon.targets(209,5): error MSB6006: "cmd.exe" exited with code -1073741515.
65>Done building project "yarpmotorgui.vcxproj" -- FAILED.
71>------ Build started: Project: yarp_JoypadControlServer, Configuration: Release x64 ------
70>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Contactable.h(338): note: see declaration of 'yarp::os::Contactable::setCallbackLock'
67>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Port.h(248): warning C4996: 'yarp::os::Contactable::setCallbackLock': Use setCallbackLock with std::mutex instead
70>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/BufferedPort.h(290): warning C4996: 'yarp::os::Contactable::setCallbackLock': Use setCallbackLock with std::mutex instead
67>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Contactable.h(338): note: see declaration of 'yarp::os::Contactable::setCallbackLock'
64>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Port.h(248): warning C4996: 'yarp::os::Contactable::setCallbackLock': Use setCallbackLock with std::mutex instead
70>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Contactable.h(338): note: see declaration of 'yarp::os::Contactable::setCallbackLock'
70>C:\Users\icub\sb\robotology\YARP\src\devices\JoypadControlNetUtils\JoypadControlNetUtils.h(50): note: see reference to class template instantiation 'yarp::os::BufferedPort<T>' being compiled
70> with
70> [
70> T=JoypadControlClient::Vector
70> ]
70>C:\Users\icub\sb\robotology\YARP\src\devices\JoypadControlClient\JoypadControlClient.h(56): note: see reference to class template instantiation 'JoypadControl::JoyPort<JoypadControlClient::Vector>' being compiled
70>C:\Users\icub\sb\build\robotology\YARP\src\devices\JoypadControlClient\yarp_plugin_yarpmod_JoypadControlClient.cpp(33): warning C4267: 'return': conversion from 'size_t' to 'int', possible loss of data
67>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/AbstractContactable.h(148): warning C4996: 'yarp::os::Contactable::setCallbackLock': Use setCallbackLock with std::mutex instead
67>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Contactable.h(338): note: see declaration of 'yarp::os::Contactable::setCallbackLock'
67>c:\users\icub\sb\robotology\yarp\src\devices\rgbdsensorwrapper\RGBDSensorWrapper.h(40): fatal error C1083: Cannot open include file: 'yarp/rosmsg/TickTime.h': No such file or directory
67>Generating Code...
64>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Contactable.h(338): note: see declaration of 'yarp::os::Contactable::setCallbackLock'
71>Building Custom Rule C:/Users/icub/sb/robotology/YARP/src/devices/JoypadControlServer/CMakeLists.txt
67>Done building project "yarp_RGBDSensorWrapper.vcxproj" -- FAILED.
72>------ Build started: Project: yarp_RGBDSensorClient, Configuration: Release x64 ------
69>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Port.h(248): warning C4996: 'yarp::os::Contactable::setCallbackLock': Use setCallbackLock with std::mutex instead
69>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Contactable.h(338): note: see declaration of 'yarp::os::Contactable::setCallbackLock'
64>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/BufferedPort.h(290): warning C4996: 'yarp::os::Contactable::setCallbackLock': Use setCallbackLock with std::mutex instead
64>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Contactable.h(338): note: see declaration of 'yarp::os::Contactable::setCallbackLock'
64>C:\Users\icub\sb\robotology\YARP\src\yarplaserscannergui\main.cpp(357): note: see reference to class template instantiation 'yarp::os::BufferedPort<yarp::os::Bottle>' being compiled
64>C:\Users\icub\sb\robotology\YARP\src\yarplaserscannergui\main.cpp(390): warning C4267: 'initializing': conversion from 'size_t' to 'int', possible loss of data
71>CMake does not need to re-run because C:/Users/icub/sb/build/robotology/YARP/src/devices/JoypadControlServer/CMakeFiles/generate.stamp is up-to-date.
68>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Port.h(248): warning C4996: 'yarp::os::Contactable::setCallbackLock': Use setCallbackLock with std::mutex instead
66>CalibratorThread.cpp
68>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Contactable.h(338): note: see declaration of 'yarp::os::Contactable::setCallbackLock'
70>JoypadControlClient.cpp
68>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/BufferedPort.h(290): warning C4996: 'yarp::os::Contactable::setCallbackLock': Use setCallbackLock with std::mutex instead
68>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Contactable.h(338): note: see declaration of 'yarp::os::Contactable::setCallbackLock'
68>c:\users\icub\sb\robotology\yarp\src\devices\audioplayerwrapper\AudioPlayerWrapper.h(94): note: see reference to class template instantiation 'yarp::os::BufferedPort<yarp::sig::Sound>' being compiled
72>Building Custom Rule C:/Users/icub/sb/robotology/YARP/src/devices/RGBDSensorClient/CMakeLists.txt
72>CMake does not need to re-run because C:/Users/icub/sb/build/robotology/YARP/src/devices/RGBDSensorClient/CMakeFiles/generate.stamp is up-to-date.
71>yarp_plugin_yarpmod_JoypadControlServer.cpp
69>Generating Code...
64>mocs_compilation.cpp
64>Generating Code...
68>Generating Code...
66>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Port.h(248): warning C4996: 'yarp::os::Contactable::setCallbackLock': Use setCallbackLock with std::mutex instead
66>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Contactable.h(338): note: see declaration of 'yarp::os::Contactable::setCallbackLock'
70>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Port.h(248): warning C4996: 'yarp::os::Contactable::setCallbackLock': Use setCallbackLock with std::mutex instead
72>yarp_plugin_yarpmod_RGBDSensorClient.cpp
70>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Contactable.h(338): note: see declaration of 'yarp::os::Contactable::setCallbackLock'
70>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/BufferedPort.h(290): warning C4996: 'yarp::os::Contactable::setCallbackLock': Use setCallbackLock with std::mutex instead
70>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Contactable.h(338): note: see declaration of 'yarp::os::Contactable::setCallbackLock'
70>C:\Users\icub\sb\robotology\YARP\src\devices\JoypadControlNetUtils\JoypadControlNetUtils.h(50): note: see reference to class template instantiation 'yarp::os::BufferedPort<T>' being compiled
70> with
70> [
70> T=JoypadControlClient::Vector
70> ]
70>c:\users\icub\sb\robotology\yarp\src\devices\joypadcontrolclient\JoypadControlClient.h(56): note: see reference to class template instantiation 'JoypadControl::JoyPort<JoypadControlClient::Vector>' being compiled
70>C:\Users\icub\sb\robotology\YARP\src\devices\JoypadControlClient\JoypadControlClient.cpp(275): warning C4244: '=': conversion from 'yarp::conf::float64_t' to 'float', possible loss of data
70>C:\Users\icub\sb\robotology\YARP\src\devices\JoypadControlClient\JoypadControlClient.cpp(289): warning C4244: '=': conversion from 'T' to 'float', possible loss of data
70> with
70> [
70> T=double
70> ]
70>C:\Users\icub\sb\robotology\YARP\src\devices\JoypadControlClient\JoypadControlClient.cpp(480): warning C4267: '+=': conversion from 'size_t' to 'int', possible loss of data
71>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Port.h(248): warning C4996: 'yarp::os::Contactable::setCallbackLock': Use setCallbackLock with std::mutex instead
66>Device.cpp
69> Creating library C:/Users/icub/sb/build/robotology/YARP/lib/Release/yarp_AudioRecorderWrapper.lib and object C:/Users/icub/sb/build/robotology/YARP/lib/Release/yarp_AudioRecorderWrapper.exp
71>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Contactable.h(338): note: see declaration of 'yarp::os::Contactable::setCallbackLock'
71>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/BufferedPort.h(290): warning C4996: 'yarp::os::Contactable::setCallbackLock': Use setCallbackLock with std::mutex instead
71>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Contactable.h(338): note: see declaration of 'yarp::os::Contactable::setCallbackLock'
71>C:\Users\icub\sb\robotology\YARP\src\devices\JoypadControlNetUtils\JoypadControlNetUtils.h(50): note: see reference to class template instantiation 'yarp::os::BufferedPort<T>' being compiled
71> with
71> [
71> T=JoypadControlServer::Vector
71> ]
71>C:\Users\icub\sb\robotology\YARP\src\devices\JoypadControlServer\JoypadControlServer.h(64): note: see reference to class template instantiation 'JoypadControl::JoyPort<JoypadControlServer::Vector>' being compiled
71>C:\Users\icub\sb\build\robotology\YARP\src\devices\JoypadControlServer\yarp_plugin_yarpmod_JoypadControlServer.cpp(33): warning C4267: 'return': conversion from 'size_t' to 'int', possible loss of data
68> Creating library C:/Users/icub/sb/build/robotology/YARP/lib/Release/yarp_AudioPlayerWrapper.lib and object C:/Users/icub/sb/build/robotology/YARP/lib/Release/yarp_AudioPlayerWrapper.exp
69>yarp_AudioRecorderWrapper.vcxproj -> C:\Users\icub\sb\build\robotology\YARP\lib\yarp\Release\yarp_AudioRecorderWrapper.dll
70>Generating Code...
68>yarp_AudioPlayerWrapper.vcxproj -> C:\Users\icub\sb\build\robotology\YARP\lib\yarp\Release\yarp_AudioPlayerWrapper.dll
72>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Port.h(248): warning C4996: 'yarp::os::Contactable::setCallbackLock': Use setCallbackLock with std::mutex instead
72>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Contactable.h(338): note: see declaration of 'yarp::os::Contactable::setCallbackLock'
71>JoypadControlServer.cpp
72>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/BufferedPort.h(290): warning C4996: 'yarp::os::Contactable::setCallbackLock': Use setCallbackLock with std::mutex instead
72>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Contactable.h(338): note: see declaration of 'yarp::os::Contactable::setCallbackLock'
72>C:\Users\icub\sb\robotology\YARP\src\devices\RGBDSensorClient\RGBDSensorClient.h(95): note: see reference to class template instantiation 'yarp::os::BufferedPort<yarp::sig::FlexImage>' being compiled
72>C:\Users\icub\sb\build\robotology\YARP\src\devices\RGBDSensorClient\yarp_plugin_yarpmod_RGBDSensorClient.cpp(33): warning C4267: 'return': conversion from 'size_t' to 'int', possible loss of data
66>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Port.h(248): warning C4996: 'yarp::os::Contactable::setCallbackLock': Use setCallbackLock with std::mutex instead
66>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Contactable.h(338): note: see declaration of 'yarp::os::Contactable::setCallbackLock'
72>RGBDSensorClient.cpp
63>Done building project "yarpdev.vcxproj".
73>------ Build started: Project: yarphear, Configuration: Release x64 ------
71>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Port.h(248): warning C4996: 'yarp::os::Contactable::setCallbackLock': Use setCallbackLock with std::mutex instead
66>Module.cpp
73>Building Custom Rule C:/Users/icub/sb/robotology/YARP/src/yarphear/CMakeLists.txt
71>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Contactable.h(338): note: see declaration of 'yarp::os::Contactable::setCallbackLock'
73>CMake does not need to re-run because C:/Users/icub/sb/build/robotology/YARP/src/yarphear/CMakeFiles/generate.stamp is up-to-date.
71>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/BufferedPort.h(290): warning C4996: 'yarp::os::Contactable::setCallbackLock': Use setCallbackLock with std::mutex instead
71>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Contactable.h(338): note: see declaration of 'yarp::os::Contactable::setCallbackLock'
71>C:\Users\icub\sb\robotology\YARP\src\devices\JoypadControlNetUtils\JoypadControlNetUtils.h(50): note: see reference to class template instantiation 'yarp::os::BufferedPort<T>' being compiled
71> with
71> [
71> T=JoypadControlServer::Vector
71> ]
71>c:\users\icub\sb\robotology\yarp\src\devices\joypadcontrolserver\JoypadControlServer.h(64): note: see reference to class template instantiation 'JoypadControl::JoyPort<JoypadControlServer::Vector>' being compiled
71>C:\Users\icub\sb\robotology\YARP\src\devices\JoypadControlServer\JoypadControlServer.cpp(654): warning C4267: 'argument': conversion from 'size_t' to 'unsigned int', possible loss of data
70> Creating library C:/Users/icub/sb/build/robotology/YARP/lib/Release/yarp_JoypadControlClient.lib and object C:/Users/icub/sb/build/robotology/YARP/lib/Release/yarp_JoypadControlClient.exp
73>yarphear.cpp
71>C:\Users\icub\sb\robotology\YARP\src\devices\JoypadControlServer\JoypadControlServer.cpp(674): warning C4267: 'argument': conversion from 'size_t' to 'unsigned int', possible loss of data
71>C:\Users\icub\sb\robotology\YARP\src\devices\JoypadControlServer\JoypadControlServer.cpp(694): warning C4267: 'argument': conversion from 'size_t' to 'unsigned int', possible loss of data
71>C:\Users\icub\sb\robotology\YARP\src\devices\JoypadControlServer\JoypadControlServer.cpp(715): warning C4267: 'argument': conversion from 'size_t' to 'unsigned int', possible loss of data
71>C:\Users\icub\sb\robotology\YARP\src\devices\JoypadControlServer\JoypadControlServer.cpp(736): warning C4267: 'argument': conversion from 'size_t' to 'unsigned int', possible loss of data
72>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Port.h(248): warning C4996: 'yarp::os::Contactable::setCallbackLock': Use setCallbackLock with std::mutex instead
72>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Contactable.h(338): note: see declaration of 'yarp::os::Contactable::setCallbackLock'
72>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/BufferedPort.h(290): warning C4996: 'yarp::os::Contactable::setCallbackLock': Use setCallbackLock with std::mutex instead
72>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Contactable.h(338): note: see declaration of 'yarp::os::Contactable::setCallbackLock'
72>c:\users\icub\sb\robotology\yarp\src\devices\rgbdsensorclient\RGBDSensorClient.h(95): note: see reference to class template instantiation 'yarp::os::BufferedPort<yarp::sig::FlexImage>' being compiled
70>yarp_JoypadControlClient.vcxproj -> C:\Users\icub\sb\build\robotology\YARP\lib\yarp\Release\yarp_JoypadControlClient.dll
71>Generating Code...
66>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Port.h(248): warning C4996: 'yarp::os::Contactable::setCallbackLock': Use setCallbackLock with std::mutex instead
72>RGBDSensorClient_StreamingMsgParser.cpp
66>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Contactable.h(338): note: see declaration of 'yarp::os::Contactable::setCallbackLock'
66>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/AbstractContactable.h(148): warning C4996: 'yarp::os::Contactable::setCallbackLock': Use setCallbackLock with std::mutex instead
66>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Contactable.h(338): note: see declaration of 'yarp::os::Contactable::setCallbackLock'
73>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Port.h(248): warning C4996: 'yarp::os::Contactable::setCallbackLock': Use setCallbackLock with std::mutex instead
73>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Contactable.h(338): note: see declaration of 'yarp::os::Contactable::setCallbackLock'
73>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/BufferedPort.h(290): warning C4996: 'yarp::os::Contactable::setCallbackLock': Use setCallbackLock with std::mutex instead
73>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Contactable.h(338): note: see declaration of 'yarp::os::Contactable::setCallbackLock'
73>C:\Users\icub\sb\robotology\YARP\src\yarphear\yarphear.cpp(36): note: see reference to class template instantiation 'yarp::os::BufferedPort<yarp::sig::Sound>' being compiled
73>C:\Users\icub\sb\robotology\YARP\src\yarphear\yarphear.cpp(169): warning C4267: '+=': conversion from 'size_t' to 'long', possible loss of data
66>Param.cpp
72>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Port.h(248): warning C4996: 'yarp::os::Contactable::setCallbackLock': Use setCallbackLock with std::mutex instead
72>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Contactable.h(338): note: see declaration of 'yarp::os::Contactable::setCallbackLock'
72>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/BufferedPort.h(290): warning C4996: 'yarp::os::Contactable::setCallbackLock': Use setCallbackLock with std::mutex instead
72>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Contactable.h(338): note: see declaration of 'yarp::os::Contactable::setCallbackLock'
72>C:\Users\icub\sb\robotology\YARP\src\devices\RGBDSensorClient\RGBDSensorClient_StreamingMsgParser.cpp(54): note: see reference to class template instantiation 'yarp::os::BufferedPort<yarp::sig::FlexImage>' being compiled
66>Robot.cpp
72>Generating Code...
68>Done building project "yarp_AudioPlayerWrapper.vcxproj".
74>------ Build started: Project: yarp_Rangefinder2DClient, Configuration: Release x64 ------
73>yarphear.vcxproj -> C:\Users\icub\sb\build\robotology\YARP\bin\Release\yarphear.exe
64>yarplaserscannergui.vcxproj -> C:\Users\icub\sb\build\robotology\YARP\bin\Release\yarplaserscannergui.exe
69>Done building project "yarp_AudioRecorderWrapper.vcxproj".
75>------ Build started: Project: yarp_Rangefinder2DWrapper, Configuration: Release x64 ------
74>Building Custom Rule C:/Users/icub/sb/robotology/YARP/src/devices/Rangefinder2DClient/CMakeLists.txt
74>CMake does not need to re-run because C:/Users/icub/sb/build/robotology/YARP/src/devices/Rangefinder2DClient/CMakeFiles/generate.stamp is up-to-date.
75>Building Custom Rule C:/Users/icub/sb/robotology/YARP/src/devices/Rangefinder2DWrapper/CMakeLists.txt
75>CMake does not need to re-run because C:/Users/icub/sb/build/robotology/YARP/src/devices/Rangefinder2DWrapper/CMakeFiles/generate.stamp is up-to-date.
66>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Port.h(248): warning C4996: 'yarp::os::Contactable::setCallbackLock': Use setCallbackLock with std::mutex instead
74>yarp_plugin_yarpmod_Rangefinder2DClient.cpp
72> Creating library C:/Users/icub/sb/build/robotology/YARP/lib/Release/yarp_RGBDSensorClient.lib and object C:/Users/icub/sb/build/robotology/YARP/lib/Release/yarp_RGBDSensorClient.exp
66>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Contactable.h(338): note: see declaration of 'yarp::os::Contactable::setCallbackLock'
75>yarp_plugin_yarpmod_Rangefinder2DWrapper.cpp
72>yarp_RGBDSensorClient.vcxproj -> C:\Users\icub\sb\build\robotology\YARP\lib\yarp\Release\yarp_RGBDSensorClient.dll
66>Types.cpp
74>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Port.h(248): warning C4996: 'yarp::os::Contactable::setCallbackLock': Use setCallbackLock with std::mutex instead
74>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Contactable.h(338): note: see declaration of 'yarp::os::Contactable::setCallbackLock'
75>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Port.h(248): warning C4996: 'yarp::os::Contactable::setCallbackLock': Use setCallbackLock with std::mutex instead
75>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Contactable.h(338): note: see declaration of 'yarp::os::Contactable::setCallbackLock'
74>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/BufferedPort.h(290): warning C4996: 'yarp::os::Contactable::setCallbackLock': Use setCallbackLock with std::mutex instead
75>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/AbstractContactable.h(148): warning C4996: 'yarp::os::Contactable::setCallbackLock': Use setCallbackLock with std::mutex instead
74>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Contactable.h(338): note: see declaration of 'yarp::os::Contactable::setCallbackLock'
74>C:\Users\icub\sb\robotology\YARP\src\devices\Rangefinder2DClient\Rangefinder2DClient.h(41): note: see reference to class template instantiation 'yarp::os::BufferedPort<yarp::os::Bottle>' being compiled
74>C:\Users\icub\sb\build\robotology\YARP\src\devices\Rangefinder2DClient\yarp_plugin_yarpmod_Rangefinder2DClient.cpp(33): warning C4267: 'return': conversion from 'size_t' to 'int', possible loss of data
75>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Contactable.h(338): note: see declaration of 'yarp::os::Contactable::setCallbackLock'
75>C:\Users\icub\sb\robotology\YARP\src\devices\Rangefinder2DWrapper\Rangefinder2DWrapper.h(51): fatal error C1083: Cannot open include file: 'yarp/rosmsg/sensor_msgs/LaserScan.h': No such file or directory
75>Rangefinder2DWrapper.cpp
70>Done building project "yarp_JoypadControlClient.vcxproj".
76>------ Build started: Project: yarp_SDLJoypad, Configuration: Release x64 ------
74>Rangefinder2DClient.cpp
76>Building Custom Rule C:/Users/icub/sb/robotology/YARP/src/devices/SDLJoypad/CMakeLists.txt
76>CMake does not need to re-run because C:/Users/icub/sb/build/robotology/YARP/src/devices/SDLJoypad/CMakeFiles/generate.stamp is up-to-date.
66>XMLReaderVx.cpp
76>yarp_plugin_yarpmod_SDLJoypad.cpp
75>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Port.h(248): warning C4996: 'yarp::os::Contactable::setCallbackLock': Use setCallbackLock with std::mutex instead
75>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Contactable.h(338): note: see declaration of 'yarp::os::Contactable::setCallbackLock'
75>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/AbstractContactable.h(148): warning C4996: 'yarp::os::Contactable::setCallbackLock': Use setCallbackLock with std::mutex instead
75>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Contactable.h(338): note: see declaration of 'yarp::os::Contactable::setCallbackLock'
75>c:\users\icub\sb\robotology\yarp\src\devices\rangefinder2dwrapper\Rangefinder2DWrapper.h(51): fatal error C1083: Cannot open include file: 'yarp/rosmsg/sensor_msgs/LaserScan.h': No such file or directory
75>Generating Code...
75>Done building project "yarp_Rangefinder2DWrapper.vcxproj" -- FAILED.
77>------ Build started: Project: yarp_analogServer, Configuration: Release x64 ------
74>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Port.h(248): warning C4996: 'yarp::os::Contactable::setCallbackLock': Use setCallbackLock with std::mutex instead
74>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Contactable.h(338): note: see declaration of 'yarp::os::Contactable::setCallbackLock'
74>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/BufferedPort.h(290): warning C4996: 'yarp::os::Contactable::setCallbackLock': Use setCallbackLock with std::mutex instead
74>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Contactable.h(338): note: see declaration of 'yarp::os::Contactable::setCallbackLock'
74>c:\users\icub\sb\robotology\yarp\src\devices\rangefinder2dclient\Rangefinder2DClient.h(41): note: see reference to class template instantiation 'yarp::os::BufferedPort<yarp::os::Bottle>' being compiled
77>Building Custom Rule C:/Users/icub/sb/robotology/YARP/src/devices/AnalogWrapper/CMakeLists.txt
74>C:\Users\icub\sb\robotology\YARP\src\devices\Rangefinder2DClient\Rangefinder2DClient.cpp(130): warning C4267: 'initializing': conversion from 'size_t' to 'unsigned int', possible loss of data
77>CMake does not need to re-run because C:/Users/icub/sb/build/robotology/YARP/src/devices/AnalogWrapper/CMakeFiles/generate.stamp is up-to-date.
77>yarp_plugin_yarpmod_analogServer.cpp
76>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Port.h(248): warning C4996: 'yarp::os::Contactable::setCallbackLock': Use setCallbackLock with std::mutex instead
76>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Contactable.h(338): note: see declaration of 'yarp::os::Contactable::setCallbackLock'
74>Generating Code...
76>C:\Users\icub\sb\build\robotology\YARP\src\devices\SDLJoypad\yarp_plugin_yarpmod_SDLJoypad.cpp(33): warning C4267: 'return': conversion from 'size_t' to 'int', possible loss of data
66>XMLReaderV1.cpp
73>Done building project "yarphear.vcxproj".
78>------ Build started: Project: yarp_analogsensorclient, Configuration: Release x64 ------
76>SDLJoypad.cpp
78>Building Custom Rule C:/Users/icub/sb/robotology/YARP/src/devices/AnalogSensorClient/CMakeLists.txt
77>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Port.h(248): warning C4996: 'yarp::os::Contactable::setCallbackLock': Use setCallbackLock with std::mutex instead
78>CMake does not need to re-run because C:/Users/icub/sb/build/robotology/YARP/src/devices/AnalogSensorClient/CMakeFiles/generate.stamp is up-to-date.
77>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Contactable.h(338): note: see declaration of 'yarp::os::Contactable::setCallbackLock'
77>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/AbstractContactable.h(148): warning C4996: 'yarp::os::Contactable::setCallbackLock': Use setCallbackLock with std::mutex instead
77>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Contactable.h(338): note: see declaration of 'yarp::os::Contactable::setCallbackLock'
77>C:\Users\icub\sb\robotology\YARP\src\devices\AnalogWrapper\AnalogWrapper.h(41): fatal error C1083: Cannot open include file: 'yarp/rosmsg/geometry_msgs/WrenchStamped.h': No such file or directory
72>Done building project "yarp_RGBDSensorClient.vcxproj".
79>------ Build started: Project: yarp_batteryClient, Configuration: Release x64 ------
78>yarp_plugin_yarpmod_analogsensorclient.cpp
74> Creating library C:/Users/icub/sb/build/robotology/YARP/lib/Release/yarp_Rangefinder2DClient.lib and object C:/Users/icub/sb/build/robotology/YARP/lib/Release/yarp_Rangefinder2DClient.exp
77>AnalogWrapper.cpp
79>Building Custom Rule C:/Users/icub/sb/robotology/YARP/src/devices/batteryClient/CMakeLists.txt
79>CMake does not need to re-run because C:/Users/icub/sb/build/robotology/YARP/src/devices/batteryClient/CMakeFiles/generate.stamp is up-to-date.
74>yarp_Rangefinder2DClient.vcxproj -> C:\Users\icub\sb\build\robotology\YARP\lib\yarp\Release\yarp_Rangefinder2DClient.dll
64>Done building project "yarplaserscannergui.vcxproj".
80>------ Build started: Project: yarp_batteryWrapper, Configuration: Release x64 ------
79>yarp_plugin_yarpmod_batteryClient.cpp
80>Building Custom Rule C:/Users/icub/sb/robotology/YARP/src/devices/batteryWrapper/CMakeLists.txt
76>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Port.h(248): warning C4996: 'yarp::os::Contactable::setCallbackLock': Use setCallbackLock with std::mutex instead
71> Creating library C:/Users/icub/sb/build/robotology/YARP/lib/Release/yarp_JoypadControlServer.lib and object C:/Users/icub/sb/build/robotology/YARP/lib/Release/yarp_JoypadControlServer.exp
80>CMake does not need to re-run because C:/Users/icub/sb/build/robotology/YARP/src/devices/batteryWrapper/CMakeFiles/generate.stamp is up-to-date.
76>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Contactable.h(338): note: see declaration of 'yarp::os::Contactable::setCallbackLock'
76>C:\Users\icub\sb\robotology\YARP\src\devices\SDLJoypad\SDLJoypad.cpp(94): warning C4267: 'argument': conversion from 'size_t' to 'int', possible loss of data
76>C:\Users\icub\sb\robotology\YARP\src\devices\SDLJoypad\SDLJoypad.cpp(131): warning C4267: 'argument': conversion from 'size_t' to 'int', possible loss of data
76>C:\Users\icub\sb\robotology\YARP\src\devices\SDLJoypad\SDLJoypad.cpp(257): warning C4244: '=': conversion from 'yarp::conf::float64_t' to 'float', possible loss of data
66>XMLReaderV3.cpp
77>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Port.h(248): warning C4996: 'yarp::os::Contactable::setCallbackLock': Use setCallbackLock with std::mutex instead
71>yarp_JoypadControlServer.vcxproj -> C:\Users\icub\sb\build\robotology\YARP\lib\yarp\Release\yarp_JoypadControlServer.dll
78>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Port.h(248): warning C4996: 'yarp::os::Contactable::setCallbackLock': Use setCallbackLock with std::mutex instead
78>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Contactable.h(338): note: see declaration of 'yarp::os::Contactable::setCallbackLock'
80>yarp_plugin_yarpmod_batteryWrapper.cpp
77>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Contactable.h(338): note: see declaration of 'yarp::os::Contactable::setCallbackLock'
77>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/AbstractContactable.h(148): warning C4996: 'yarp::os::Contactable::setCallbackLock': Use setCallbackLock with std::mutex instead
77>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Contactable.h(338): note: see declaration of 'yarp::os::Contactable::setCallbackLock'
77>c:\users\icub\sb\robotology\yarp\src\devices\analogwrapper\AnalogWrapper.h(41): fatal error C1083: Cannot open include file: 'yarp/rosmsg/geometry_msgs/WrenchStamped.h': No such file or directory
77>Generating Code...
78>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/BufferedPort.h(290): warning C4996: 'yarp::os::Contactable::setCallbackLock': Use setCallbackLock with std::mutex instead
77>Done building project "yarp_analogServer.vcxproj" -- FAILED.
81>------ Build started: Project: yarp_controlboardremapper, Configuration: Release x64 ------
78>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Contactable.h(338): note: see declaration of 'yarp::os::Contactable::setCallbackLock'
78>C:\Users\icub\sb\robotology\YARP\src\devices\AnalogSensorClient\AnalogSensorClient.h(30): note: see reference to class template instantiation 'yarp::os::BufferedPort<yarp::sig::Vector>' being compiled
78>C:\Users\icub\sb\build\robotology\YARP\src\devices\AnalogSensorClient\yarp_plugin_yarpmod_analogsensorclient.cpp(33): warning C4267: 'return': conversion from 'size_t' to 'int', possible loss of data
76>Generating Code...
79>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Port.h(248): warning C4996: 'yarp::os::Contactable::setCallbackLock': Use setCallbackLock with std::mutex instead
79>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Contactable.h(338): note: see declaration of 'yarp::os::Contactable::setCallbackLock'
78>AnalogSensorClient.cpp
79>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/BufferedPort.h(290): warning C4996: 'yarp::os::Contactable::setCallbackLock': Use setCallbackLock with std::mutex instead
79>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Contactable.h(338): note: see declaration of 'yarp::os::Contactable::setCallbackLock'
79>C:\Users\icub\sb\robotology\YARP\src\devices\batteryClient\BatteryClient.h(41): note: see reference to class template instantiation 'yarp::os::BufferedPort<yarp::os::Bottle>' being compiled
79>C:\Users\icub\sb\build\robotology\YARP\src\devices\batteryClient\yarp_plugin_yarpmod_batteryClient.cpp(33): warning C4267: 'return': conversion from 'size_t' to 'int', possible loss of data
81>Building Custom Rule C:/Users/icub/sb/robotology/YARP/src/devices/ControlBoardRemapper/CMakeLists.txt
79>BatteryClient.cpp
81>CMake does not need to re-run because C:/Users/icub/sb/build/robotology/YARP/src/devices/ControlBoardRemapper/CMakeFiles/generate.stamp is up-to-date.
80>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Port.h(248): warning C4996: 'yarp::os::Contactable::setCallbackLock': Use setCallbackLock with std::mutex instead
80>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Contactable.h(338): note: see declaration of 'yarp::os::Contactable::setCallbackLock'
80>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/BufferedPort.h(290): warning C4996: 'yarp::os::Contactable::setCallbackLock': Use setCallbackLock with std::mutex instead
80>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Contactable.h(338): note: see declaration of 'yarp::os::Contactable::setCallbackLock'
80>C:\Users\icub\sb\robotology\YARP\src\devices\batteryWrapper\BatteryWrapper.h(133): note: see reference to class template instantiation 'yarp::os::BufferedPort<yarp::os::Bottle>' being compiled
80>C:\Users\icub\sb\build\robotology\YARP\src\devices\batteryWrapper\yarp_plugin_yarpmod_batteryWrapper.cpp(33): warning C4267: 'return': conversion from 'size_t' to 'int', possible loss of data
78>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Port.h(248): warning C4996: 'yarp::os::Contactable::setCallbackLock': Use setCallbackLock with std::mutex instead
66>RobotInterfaceDTD.cpp
78>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Contactable.h(338): note: see declaration of 'yarp::os::Contactable::setCallbackLock'
80>BatteryWrapper.cpp
81>yarp_plugin_yarpmod_controlboardremapper.cpp
78>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/BufferedPort.h(290): warning C4996: 'yarp::os::Contactable::setCallbackLock': Use setCallbackLock with std::mutex instead
78>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Contactable.h(338): note: see declaration of 'yarp::os::Contactable::setCallbackLock'
78>c:\users\icub\sb\robotology\yarp\src\devices\analogsensorclient\AnalogSensorClient.h(30): note: see reference to class template instantiation 'yarp::os::BufferedPort<yarp::sig::Vector>' being compiled
76> Creating library C:/Users/icub/sb/build/robotology/YARP/lib/Release/yarp_SDLJoypad.lib and object C:/Users/icub/sb/build/robotology/YARP/lib/Release/yarp_SDLJoypad.exp
79>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Port.h(248): warning C4996: 'yarp::os::Contactable::setCallbackLock': Use setCallbackLock with std::mutex instead
79>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Contactable.h(338): note: see declaration of 'yarp::os::Contactable::setCallbackLock'
78>Generating Code...
79>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/BufferedPort.h(290): warning C4996: 'yarp::os::Contactable::setCallbackLock': Use setCallbackLock with std::mutex instead
79>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Contactable.h(338): note: see declaration of 'yarp::os::Contactable::setCallbackLock'
79>c:\users\icub\sb\robotology\yarp\src\devices\batteryclient\BatteryClient.h(41): note: see reference to class template instantiation 'yarp::os::BufferedPort<yarp::os::Bottle>' being compiled
76>yarp_SDLJoypad.vcxproj -> C:\Users\icub\sb\build\robotology\YARP\lib\yarp\Release\yarp_SDLJoypad.dll
79>Generating Code...
74>Done building project "yarp_Rangefinder2DClient.vcxproj".
82>------ Build started: Project: yarp_controlboardwrapper2, Configuration: Release x64 ------
80>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Port.h(248): warning C4996: 'yarp::os::Contactable::setCallbackLock': Use setCallbackLock with std::mutex instead
80>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Contactable.h(338): note: see declaration of 'yarp::os::Contactable::setCallbackLock'
81>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Port.h(248): warning C4996: 'yarp::os::Contactable::setCallbackLock': Use setCallbackLock with std::mutex instead
80>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/BufferedPort.h(290): warning C4996: 'yarp::os::Contactable::setCallbackLock': Use setCallbackLock with std::mutex instead
80>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Contactable.h(338): note: see declaration of 'yarp::os::Contactable::setCallbackLock'
80>c:\users\icub\sb\robotology\yarp\src\devices\batterywrapper\BatteryWrapper.h(133): note: see reference to class template instantiation 'yarp::os::BufferedPort<yarp::os::Bottle>' being compiled
81>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Contactable.h(338): note: see declaration of 'yarp::os::Contactable::setCallbackLock'
66>yarprobotinterfaceRpc.cpp
81>C:\Users\icub\sb\build\robotology\YARP\src\devices\ControlBoardRemapper\yarp_plugin_yarpmod_controlboardremapper.cpp(33): warning C4267: 'return': conversion from 'size_t' to 'int', possible loss of data
82>Building Custom Rule C:/Users/icub/sb/robotology/YARP/src/devices/ControlBoardWrapper/CMakeLists.txt
78> Creating library C:/Users/icub/sb/build/robotology/YARP/lib/Release/yarp_analogsensorclient.lib and object C:/Users/icub/sb/build/robotology/YARP/lib/Release/yarp_analogsensorclient.exp
82>CMake does not need to re-run because C:/Users/icub/sb/build/robotology/YARP/src/devices/ControlBoardWrapper/CMakeFiles/generate.stamp is up-to-date.
80>Generating Code...
82>yarp_plugin_yarpmod_controlboardwrapper2.cpp
78>yarp_analogsensorclient.vcxproj -> C:\Users\icub\sb\build\robotology\YARP\lib\yarp\Release\yarp_analogsensorclient.dll
79> Creating library C:/Users/icub/sb/build/robotology/YARP/lib/Release/yarp_batteryClient.lib and object C:/Users/icub/sb/build/robotology/YARP/lib/Release/yarp_batteryClient.exp
81>yarp_plugin_yarpmod_remotecontrolboardremapper.cpp
71>Done building project "yarp_JoypadControlServer.vcxproj".
83>------ Build started: Project: yarp_fakebot, Configuration: Release x64 ------
79>yarp_batteryClient.vcxproj -> C:\Users\icub\sb\build\robotology\YARP\lib\yarp\Release\yarp_batteryClient.dll
83>Building Custom Rule C:/Users/icub/sb/robotology/YARP/src/devices/fakebot/CMakeLists.txt
83>CMake does not need to re-run because C:/Users/icub/sb/build/robotology/YARP/src/devices/fakebot/CMakeFiles/generate.stamp is up-to-date.
80> Creating library C:/Users/icub/sb/build/robotology/YARP/lib/Release/yarp_batteryWrapper.lib and object C:/Users/icub/sb/build/robotology/YARP/lib/Release/yarp_batteryWrapper.exp
66>Generating Code...
83>yarp_plugin_yarpmod_fakebot.cpp
82>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Port.h(248): warning C4996: 'yarp::os::Contactable::setCallbackLock': Use setCallbackLock with std::mutex instead
81>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Port.h(248): warning C4996: 'yarp::os::Contactable::setCallbackLock': Use setCallbackLock with std::mutex instead
82>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Contactable.h(338): note: see declaration of 'yarp::os::Contactable::setCallbackLock'
81>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Contactable.h(338): note: see declaration of 'yarp::os::Contactable::setCallbackLock'
82>C:\Users\icub\sb\robotology\YARP\src\libYARP_dev\src\idl_generated_code\yarp/dev/impl/jointData.h(50): warning C4251: 'yarp::dev::impl::jointData::controlMode': class 'yarp::sig::VectorOf<int>' needs to have dll-interface to be used by clients of class 'yarp::dev::impl::jointData'
82>C:\Users\icub\sb\robotology\YARP\src\libYARP_dev\src\idl_generated_code\yarp/dev/impl/jointData.h(50): note: see declaration of 'yarp::sig::VectorOf<int>'
82>C:\Users\icub\sb\robotology\YARP\src\libYARP_dev\src\idl_generated_code\yarp/dev/impl/jointData.h(52): warning C4251: 'yarp::dev::impl::jointData::interactionMode': class 'yarp::sig::VectorOf<int>' needs to have dll-interface to be used by clients of class 'yarp::dev::impl::jointData'
82>C:\Users\icub\sb\robotology\YARP\src\libYARP_dev\src\idl_generated_code\yarp/dev/impl/jointData.h(50): note: see declaration of 'yarp::sig::VectorOf<int>'
82>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/AbstractContactable.h(148): warning C4996: 'yarp::os::Contactable::setCallbackLock': Use setCallbackLock with std::mutex instead
82>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Contactable.h(338): note: see declaration of 'yarp::os::Contactable::setCallbackLock'
81>C:\Users\icub\sb\build\robotology\YARP\src\devices\ControlBoardRemapper\yarp_plugin_yarpmod_remotecontrolboardremapper.cpp(33): warning C4267: 'return': conversion from 'size_t' to 'int', possible loss of data
82>C:\Users\icub\sb\robotology\YARP\src\devices\ControlBoardWrapper\ControlBoardWrapper.h(47): fatal error C1083: Cannot open include file: 'yarp/rosmsg/sensor_msgs/JointState.h': No such file or directory
82>ControlBoardWrapper.cpp
80>yarp_batteryWrapper.vcxproj -> C:\Users\icub\sb\build\robotology\YARP\lib\yarp\Release\yarp_batteryWrapper.dll
81>ControlBoardRemapper.cpp
83>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Port.h(248): warning C4996: 'yarp::os::Contactable::setCallbackLock': Use setCallbackLock with std::mutex instead
83>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Contactable.h(338): note: see declaration of 'yarp::os::Contactable::setCallbackLock'
83>C:\Users\icub\sb\build\robotology\YARP\src\devices\fakebot\yarp_plugin_yarpmod_fakebot.cpp(33): warning C4267: 'return': conversion from 'size_t' to 'int', possible loss of data
82>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Port.h(248): warning C4996: 'yarp::os::Contactable::setCallbackLock': Use setCallbackLock with std::mutex instead
82>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Contactable.h(338): note: see declaration of 'yarp::os::Contactable::setCallbackLock'
82>C:\Users\icub\sb\robotology\YARP\src\libYARP_dev\src\idl_generated_code\yarp/dev/impl/jointData.h(50): warning C4251: 'yarp::dev::impl::jointData::controlMode': class 'yarp::sig::VectorOf<int>' needs to have dll-interface to be used by clients of class 'yarp::dev::impl::jointData'
82>C:\Users\icub\sb\robotology\YARP\src\libYARP_dev\src\idl_generated_code\yarp/dev/impl/jointData.h(50): note: see declaration of 'yarp::sig::VectorOf<int>'
82>C:\Users\icub\sb\robotology\YARP\src\libYARP_dev\src\idl_generated_code\yarp/dev/impl/jointData.h(52): warning C4251: 'yarp::dev::impl::jointData::interactionMode': class 'yarp::sig::VectorOf<int>' needs to have dll-interface to be used by clients of class 'yarp::dev::impl::jointData'
81>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Port.h(248): warning C4996: 'yarp::os::Contactable::setCallbackLock': Use setCallbackLock with std::mutex instead
83>FakeBot.cpp
81>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Contactable.h(338): note: see declaration of 'yarp::os::Contactable::setCallbackLock'
82>C:\Users\icub\sb\robotology\YARP\src\libYARP_dev\src\idl_generated_code\yarp/dev/impl/jointData.h(50): note: see declaration of 'yarp::sig::VectorOf<int>'
82>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/AbstractContactable.h(148): warning C4996: 'yarp::os::Contactable::setCallbackLock': Use setCallbackLock with std::mutex instead
82>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Contactable.h(338): note: see declaration of 'yarp::os::Contactable::setCallbackLock'
82>c:\users\icub\sb\robotology\yarp\src\devices\controlboardwrapper\ControlBoardWrapper.h(47): fatal error C1083: Cannot open include file: 'yarp/rosmsg/sensor_msgs/JointState.h': No such file or directory
82>RPCMessagesParser.cpp
81>C:\Users\icub\sb\robotology\YARP\src\devices\ControlBoardRemapper\ControlBoardRemapper.cpp(122): warning C4267: 'initializing': conversion from 'size_t' to 'int', possible loss of data
81>C:\Users\icub\sb\robotology\YARP\src\devices\ControlBoardRemapper\ControlBoardRemapper.cpp(206): warning C4267: '=': conversion from 'size_t' to 'int', possible loss of data
81>C:\Users\icub\sb\robotology\YARP\src\devices\ControlBoardRemapper\ControlBoardRemapper.cpp(399): warning C4267: 'argument': conversion from 'size_t' to 'int', possible loss of data
81>C:\Users\icub\sb\robotology\YARP\src\devices\ControlBoardRemapper\ControlBoardRemapper.cpp(464): warning C4267: 'initializing': conversion from 'size_t' to 'int', possible loss of data
82>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Port.h(248): warning C4996: 'yarp::os::Contactable::setCallbackLock': Use setCallbackLock with std::mutex instead
83>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Port.h(248): warning C4996: 'yarp::os::Contactable::setCallbackLock': Use setCallbackLock with std::mutex instead
76>Done building project "yarp_SDLJoypad.vcxproj".
84>------ Build started: Project: yarp_grabberDual, Configuration: Release x64 ------
82>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Contactable.h(338): note: see declaration of 'yarp::os::Contactable::setCallbackLock'
83>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Contactable.h(338): note: see declaration of 'yarp::os::Contactable::setCallbackLock'
82>C:\Users\icub\sb\robotology\YARP\src\libYARP_dev\src\idl_generated_code\yarp/dev/impl/jointData.h(50): warning C4251: 'yarp::dev::impl::jointData::controlMode': class 'yarp::sig::VectorOf<int>' needs to have dll-interface to be used by clients of class 'yarp::dev::impl::jointData'
81>ControlBoardRemapperHelpers.cpp
82>C:\Users\icub\sb\robotology\YARP\src\libYARP_dev\src\idl_generated_code\yarp/dev/impl/jointData.h(50): note: see declaration of 'yarp::sig::VectorOf<int>'
82>C:\Users\icub\sb\robotology\YARP\src\libYARP_dev\src\idl_generated_code\yarp/dev/impl/jointData.h(52): warning C4251: 'yarp::dev::impl::jointData::interactionMode': class 'yarp::sig::VectorOf<int>' needs to have dll-interface to be used by clients of class 'yarp::dev::impl::jointData'
82>C:\Users\icub\sb\robotology\YARP\src\libYARP_dev\src\idl_generated_code\yarp/dev/impl/jointData.h(50): note: see declaration of 'yarp::sig::VectorOf<int>'
82>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/AbstractContactable.h(148): warning C4996: 'yarp::os::Contactable::setCallbackLock': Use setCallbackLock with std::mutex instead
82>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Contactable.h(338): note: see declaration of 'yarp::os::Contactable::setCallbackLock'
82>c:\users\icub\sb\robotology\yarp\src\devices\controlboardwrapper\ControlBoardWrapper.h(47): fatal error C1083: Cannot open include file: 'yarp/rosmsg/sensor_msgs/JointState.h': No such file or directory
82>StreamingMessagesParser.cpp
83>C:\Users\icub\sb\robotology\YARP\src\devices\fakebot\FakeBot.cpp(50): warning C4244: 'initializing': conversion from 'double' to 'int', possible loss of data
83>C:\Users\icub\sb\robotology\YARP\src\devices\fakebot\FakeBot.cpp(51): warning C4244: 'initializing': conversion from 'double' to 'int', possible loss of data
83>C:\Users\icub\sb\robotology\YARP\src\devices\fakebot\FakeBot.cpp(55): warning C4244: '=': conversion from 'size_t' to 'double', possible loss of data
83>C:\Users\icub\sb\robotology\YARP\src\devices\fakebot\FakeBot.cpp(56): warning C4244: '=': conversion from 'size_t' to 'double', possible loss of data
83>C:\Users\icub\sb\robotology\YARP\src\devices\fakebot\FakeBot.cpp(66): warning C4244: '=': conversion from 'size_t' to 'double', possible loss of data
84>Building Custom Rule C:/Users/icub/sb/robotology/YARP/src/devices/ServerGrabber/CMakeLists.txt
78>Done building project "yarp_analogsensorclient.vcxproj".
85>------ Build started: Project: yarp_group, Configuration: Release x64 ------
84>CMake does not need to re-run because C:/Users/icub/sb/build/robotology/YARP/src/devices/ServerGrabber/CMakeFiles/generate.stamp is up-to-date.
79>Done building project "yarp_batteryClient.vcxproj".
86>------ Build started: Project: yarp_inertial, Configuration: Release x64 ------
84>yarp_plugin_yarpmod_grabberDual.cpp
83>Generating Code...
81>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Port.h(248): warning C4996: 'yarp::os::Contactable::setCallbackLock': Use setCallbackLock with std::mutex instead
81>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Contactable.h(338): note: see declaration of 'yarp::os::Contactable::setCallbackLock'
82>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Port.h(248): warning C4996: 'yarp::os::Contactable::setCallbackLock': Use setCallbackLock with std::mutex instead
82>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Contactable.h(338): note: see declaration of 'yarp::os::Contactable::setCallbackLock'
85>Building Custom Rule C:/Users/icub/sb/robotology/YARP/src/devices/DeviceGroup/CMakeLists.txt
85>CMake does not need to re-run because C:/Users/icub/sb/build/robotology/YARP/src/devices/DeviceGroup/CMakeFiles/generate.stamp is up-to-date.
85>yarp_plugin_yarpmod_group.cpp
81>C:\Users\icub\sb\robotology\YARP\src\devices\ControlBoardRemapper\ControlBoardRemapperHelpers.cpp(219): warning C4267: '=': conversion from 'size_t' to 'int', possible loss of data
82>C:\Users\icub\sb\robotology\YARP\src\libYARP_dev\src\idl_generated_code\yarp/dev/impl/jointData.h(50): warning C4251: 'yarp::dev::impl::jointData::controlMode': class 'yarp::sig::VectorOf<int>' needs to have dll-interface to be used by clients of class 'yarp::dev::impl::jointData'
86>Building Custom Rule C:/Users/icub/sb/robotology/YARP/src/devices/ServerInertial/CMakeLists.txt
86>CMake does not need to re-run because C:/Users/icub/sb/build/robotology/YARP/src/devices/ServerInertial/CMakeFiles/generate.stamp is up-to-date.
82>C:\Users\icub\sb\robotology\YARP\src\libYARP_dev\src\idl_generated_code\yarp/dev/impl/jointData.h(50): note: see declaration of 'yarp::sig::VectorOf<int>'
82>C:\Users\icub\sb\robotology\YARP\src\libYARP_dev\src\idl_generated_code\yarp/dev/impl/jointData.h(52): warning C4251: 'yarp::dev::impl::jointData::interactionMode': class 'yarp::sig::VectorOf<int>' needs to have dll-interface to be used by clients of class 'yarp::dev::impl::jointData'
82>C:\Users\icub\sb\robotology\YARP\src\libYARP_dev\src\idl_generated_code\yarp/dev/impl/jointData.h(50): note: see declaration of 'yarp::sig::VectorOf<int>'
82>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/AbstractContactable.h(148): warning C4996: 'yarp::os::Contactable::setCallbackLock': Use setCallbackLock with std::mutex instead
82>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Contactable.h(338): note: see declaration of 'yarp::os::Contactable::setCallbackLock'
82>c:\users\icub\sb\robotology\yarp\src\devices\controlboardwrapper\ControlBoardWrapper.h(47): fatal error C1083: Cannot open include file: 'yarp/rosmsg/sensor_msgs/JointState.h': No such file or directory
82>SubDevice.cpp
84>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Port.h(248): warning C4996: 'yarp::os::Contactable::setCallbackLock': Use setCallbackLock with std::mutex instead
84>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Contactable.h(338): note: see declaration of 'yarp::os::Contactable::setCallbackLock'
80>Done building project "yarp_batteryWrapper.vcxproj".
83> Creating library C:/Users/icub/sb/build/robotology/YARP/lib/Release/yarp_fakebot.lib and object C:/Users/icub/sb/build/robotology/YARP/lib/Release/yarp_fakebot.exp
83>yarp_fakebot.vcxproj -> C:\Users\icub\sb\build\robotology\YARP\lib\yarp\Release\yarp_fakebot.dll
84>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/BufferedPort.h(290): warning C4996: 'yarp::os::Contactable::setCallbackLock': Use setCallbackLock with std::mutex instead
84>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Contactable.h(338): note: see declaration of 'yarp::os::Contactable::setCallbackLock'
84>C:\Users\icub\sb\robotology\YARP\src\devices\ServerGrabber\ServerGrabber.h(201): note: see reference to class template instantiation 'yarp::os::BufferedPort<yarp::sig::FlexImage>' being compiled
84>C:\Users\icub\sb\build\robotology\YARP\src\devices\ServerGrabber\yarp_plugin_yarpmod_grabberDual.cpp(33): warning C4267: 'return': conversion from 'size_t' to 'int', possible loss of data
84>ServerGrabber.cpp
81>RemoteControlBoardRemapper.cpp
86>yarp_plugin_yarpmod_inertial.cpp
85>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Port.h(248): warning C4996: 'yarp::os::Contactable::setCallbackLock': Use setCallbackLock with std::mutex instead
85>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Contactable.h(338): note: see declaration of 'yarp::os::Contactable::setCallbackLock'
85>C:\Users\icub\sb\build\robotology\YARP\src\devices\DeviceGroup\yarp_plugin_yarpmod_group.cpp(33): warning C4267: 'return': conversion from 'size_t' to 'int', possible loss of data
87>------ Build started: Project: yarp_localization2DClient, Configuration: Release x64 ------
82>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Port.h(248): warning C4996: 'yarp::os::Contactable::setCallbackLock': Use setCallbackLock with std::mutex instead
82>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Contactable.h(338): note: see declaration of 'yarp::os::Contactable::setCallbackLock'
82>C:\Users\icub\sb\robotology\YARP\src\libYARP_dev\src\idl_generated_code\yarp/dev/impl/jointData.h(50): warning C4251: 'yarp::dev::impl::jointData::controlMode': class 'yarp::sig::VectorOf<int>' needs to have dll-interface to be used by clients of class 'yarp::dev::impl::jointData'
82>C:\Users\icub\sb\robotology\YARP\src\libYARP_dev\src\idl_generated_code\yarp/dev/impl/jointData.h(50): note: see declaration of 'yarp::sig::VectorOf<int>'
85>DeviceGroup.cpp
81>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Port.h(248): warning C4996: 'yarp::os::Contactable::setCallbackLock': Use setCallbackLock with std::mutex instead
81>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Contactable.h(338): note: see declaration of 'yarp::os::Contactable::setCallbackLock'
86>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Port.h(248): warning C4996: 'yarp::os::Contactable::setCallbackLock': Use setCallbackLock with std::mutex instead
86>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Contactable.h(338): note: see declaration of 'yarp::os::Contactable::setCallbackLock'
86>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/AbstractContactable.h(148): warning C4996: 'yarp::os::Contactable::setCallbackLock': Use setCallbackLock with std::mutex instead
86>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Contactable.h(338): note: see declaration of 'yarp::os::Contactable::setCallbackLock'
86>C:\Users\icub\sb\robotology\YARP\src\devices\ServerInertial\ServerInertial.h(30): fatal error C1083: Cannot open include file: 'yarp/rosmsg/sensor_msgs/Imu.h': No such file or directory
86>ServerInertial.cpp
82>C:\Users\icub\sb\robotology\YARP\src\libYARP_dev\src\idl_generated_code\yarp/dev/impl/jointData.h(52): warning C4251: 'yarp::dev::impl::jointData::interactionMode': class 'yarp::sig::VectorOf<int>' needs to have dll-interface to be used by clients of class 'yarp::dev::impl::jointData'
82>C:\Users\icub\sb\robotology\YARP\src\libYARP_dev\src\idl_generated_code\yarp/dev/impl/jointData.h(50): note: see declaration of 'yarp::sig::VectorOf<int>'
82>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/AbstractContactable.h(148): warning C4996: 'yarp::os::Contactable::setCallbackLock': Use setCallbackLock with std::mutex instead
82>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Contactable.h(338): note: see declaration of 'yarp::os::Contactable::setCallbackLock'
82>c:\users\icub\sb\robotology\yarp\src\devices\controlboardwrapper\ControlBoardWrapper.h(47): fatal error C1083: Cannot open include file: 'yarp/rosmsg/sensor_msgs/JointState.h': No such file or directory
82>Generating Code...
84>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Port.h(248): warning C4996: 'yarp::os::Contactable::setCallbackLock': Use setCallbackLock with std::mutex instead
84>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Contactable.h(338): note: see declaration of 'yarp::os::Contactable::setCallbackLock'
84>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/BufferedPort.h(290): warning C4996: 'yarp::os::Contactable::setCallbackLock': Use setCallbackLock with std::mutex instead
84>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Contactable.h(338): note: see declaration of 'yarp::os::Contactable::setCallbackLock'
84>c:\users\icub\sb\robotology\yarp\src\devices\servergrabber\ServerGrabber.h(201): note: see reference to class template instantiation 'yarp::os::BufferedPort<yarp::sig::FlexImage>' being compiled
84>C:\Users\icub\sb\robotology\YARP\src\devices\ServerGrabber\ServerGrabber.cpp(489): warning C4267: 'initializing': conversion from 'size_t' to 'int', possible loss of data
84>C:\Users\icub\sb\robotology\YARP\src\devices\ServerGrabber\ServerGrabber.cpp(600): warning C4267: 'argument': conversion from 'size_t' to 'int32_t', possible loss of data
84>C:\Users\icub\sb\robotology\YARP\src\devices\ServerGrabber\ServerGrabber.cpp(601): warning C4267: 'argument': conversion from 'size_t' to 'int32_t', possible loss of data
84>C:\Users\icub\sb\robotology\YARP\src\devices\ServerGrabber\ServerGrabber.cpp(603): warning C4267: 'argument': conversion from 'size_t' to 'int', possible loss of data
87>Building Custom Rule C:/Users/icub/sb/robotology/YARP/src/devices/localization2DClient/CMakeLists.txt
87>CMake does not need to re-run because C:/Users/icub/sb/build/robotology/YARP/src/devices/localization2DClient/CMakeFiles/generate.stamp is up-to-date.
82>Done building project "yarp_controlboardwrapper2.vcxproj" -- FAILED.
85>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Port.h(248): warning C4996: 'yarp::os::Contactable::setCallbackLock': Use setCallbackLock with std::mutex instead
85>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Contactable.h(338): note: see declaration of 'yarp::os::Contactable::setCallbackLock'
88>------ Build started: Project: yarp_localization2DServer, Configuration: Release x64 ------
86>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Port.h(248): warning C4996: 'yarp::os::Contactable::setCallbackLock': Use setCallbackLock with std::mutex instead
86>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Contactable.h(338): note: see declaration of 'yarp::os::Contactable::setCallbackLock'
86>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/AbstractContactable.h(148): warning C4996: 'yarp::os::Contactable::setCallbackLock': Use setCallbackLock with std::mutex instead
86>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Contactable.h(338): note: see declaration of 'yarp::os::Contactable::setCallbackLock'
86>c:\users\icub\sb\robotology\yarp\src\devices\serverinertial\ServerInertial.h(30): fatal error C1083: Cannot open include file: 'yarp/rosmsg/sensor_msgs/Imu.h': No such file or directory
86>Generating Code...
86>Done building project "yarp_inertial.vcxproj" -- FAILED.
89>------ Build started: Project: yarp_map2DClient, Configuration: Release x64 ------
87>yarp_plugin_yarpmod_localization2DClient.cpp
87>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Port.h(248): warning C4996: 'yarp::os::Contactable::setCallbackLock': Use setCallbackLock with std::mutex instead
87>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Contactable.h(338): note: see declaration of 'yarp::os::Contactable::setCallbackLock'
81>Generating Code...
84>Generating Code...
85>Generating Code...
87>C:\Users\icub\sb\robotology\YARP\src\libYARP_dev\src\yarp/dev/Map2DLocation.h(101): warning C4251: 'yarp::dev::Map2DLocation::map_id': class 'std::basic_string<char,std::char_traits<char>,std::allocator<char>>' needs to have dll-interface to be used by clients of struct 'yarp::dev::Map2DLocation'
87>C:\Program Files (x86)\Microsoft Visual Studio\2017\Enterprise\VC\Tools\MSVC\14.16.27023\include\xstring(4373): note: see declaration of 'std::basic_string<char,std::char_traits<char>,std::allocator<char>>'
87>C:\Users\icub\sb\build\robotology\YARP\src\devices\localization2DClient\yarp_plugin_yarpmod_localization2DClient.cpp(33): warning C4267: 'return': conversion from 'size_t' to 'int', possible loss of data
87>Localization2DClient.cpp
83>Done building project "yarp_fakebot.vcxproj".
90>------ Build started: Project: yarp_map2DServer, Configuration: Release x64 ------
84> Creating library C:/Users/icub/sb/build/robotology/YARP/lib/Release/yarp_grabberDual.lib and object C:/Users/icub/sb/build/robotology/YARP/lib/Release/yarp_grabberDual.exp
84>yarp_grabberDual.vcxproj -> C:\Users\icub\sb\build\robotology\YARP\lib\yarp\Release\yarp_grabberDual.dll
88>Building Custom Rule C:/Users/icub/sb/robotology/YARP/src/devices/localization2DServer/CMakeLists.txt
88>CMake does not need to re-run because C:/Users/icub/sb/build/robotology/YARP/src/devices/localization2DServer/CMakeFiles/generate.stamp is up-to-date.
88>yarp_plugin_yarpmod_localization2DServer.cpp
85> Creating library C:/Users/icub/sb/build/robotology/YARP/lib/Release/yarp_group.lib and object C:/Users/icub/sb/build/robotology/YARP/lib/Release/yarp_group.exp
85>yarp_group.vcxproj -> C:\Users\icub\sb\build\robotology\YARP\lib\yarp\Release\yarp_group.dll
89>Building Custom Rule C:/Users/icub/sb/robotology/YARP/src/devices/map2DClient/CMakeLists.txt
89>CMake does not need to re-run because C:/Users/icub/sb/build/robotology/YARP/src/devices/map2DClient/CMakeFiles/generate.stamp is up-to-date.
89>yarp_plugin_yarpmod_map2DClient.cpp
66>yarprobotinterface.vcxproj -> C:\Users\icub\sb\build\robotology\YARP\bin\Release\yarprobotinterface.exe
90>Building Custom Rule C:/Users/icub/sb/robotology/YARP/src/devices/map2DServer/CMakeLists.txt
87>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Port.h(248): warning C4996: 'yarp::os::Contactable::setCallbackLock': Use setCallbackLock with std::mutex instead
90>CMake does not need to re-run because C:/Users/icub/sb/build/robotology/YARP/src/devices/map2DServer/CMakeFiles/generate.stamp is up-to-date.
87>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Contactable.h(338): note: see declaration of 'yarp::os::Contactable::setCallbackLock'
87>C:\Users\icub\sb\robotology\YARP\src\libYARP_dev\src\yarp/dev/Map2DLocation.h(101): warning C4251: 'yarp::dev::Map2DLocation::map_id': class 'std::basic_string<char,std::char_traits<char>,std::allocator<char>>' needs to have dll-interface to be used by clients of struct 'yarp::dev::Map2DLocation'
87>C:\Program Files (x86)\Microsoft Visual Studio\2017\Enterprise\VC\Tools\MSVC\14.16.27023\include\xstring(4373): note: see declaration of 'std::basic_string<char,std::char_traits<char>,std::allocator<char>>'
87>Generating Code...
89>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Port.h(248): warning C4996: 'yarp::os::Contactable::setCallbackLock': Use setCallbackLock with std::mutex instead
89>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Contactable.h(338): note: see declaration of 'yarp::os::Contactable::setCallbackLock'
89>C:\Users\icub\sb\robotology\YARP\src\libYARP_dev\src\yarp/dev/MapGrid2D.h(44): warning C4251: 'yarp::dev::MapGrid2D::m_map_occupancy': class 'yarp::sig::ImageOf<yarp::sig::PixelMono>' needs to have dll-interface to be used by clients of class 'yarp::dev::MapGrid2D'
89>C:\Users\icub\sb\robotology\YARP\src\libYARP_sig\src\yarp/sig/Image.h(632): note: see declaration of 'yarp::sig::ImageOf<yarp::sig::PixelMono>'
89>C:\Users\icub\sb\robotology\YARP\src\libYARP_dev\src\yarp/dev/MapGrid2D.h(45): warning C4251: 'yarp::dev::MapGrid2D::m_map_flags': class 'yarp::sig::ImageOf<yarp::sig::PixelMono>' needs to have dll-interface to be used by clients of class 'yarp::dev::MapGrid2D'
89>C:\Users\icub\sb\robotology\YARP\src\libYARP_sig\src\yarp/sig/Image.h(632): note: see declaration of 'yarp::sig::ImageOf<yarp::sig::PixelMono>'
89>C:\Users\icub\sb\robotology\YARP\src\libYARP_dev\src\yarp/dev/Map2DLocation.h(101): warning C4251: 'yarp::dev::Map2DLocation::map_id': class 'std::basic_string<char,std::char_traits<char>,std::allocator<char>>' needs to have dll-interface to be used by clients of struct 'yarp::dev::Map2DLocation'
89>C:\Program Files (x86)\Microsoft Visual Studio\2017\Enterprise\VC\Tools\MSVC\14.16.27023\include\xstring(4373): note: see declaration of 'std::basic_string<char,std::char_traits<char>,std::allocator<char>>'
89>C:\Users\icub\sb\robotology\YARP\src\libYARP_dev\src\yarp/dev/Map2DArea.h(96): warning C4251: 'yarp::dev::Map2DArea::map_id': class 'std::basic_string<char,std::char_traits<char>,std::allocator<char>>' needs to have dll-interface to be used by clients of class 'yarp::dev::Map2DArea'
89>C:\Program Files (x86)\Microsoft Visual Studio\2017\Enterprise\VC\Tools\MSVC\14.16.27023\include\xstring(4373): note: see declaration of 'std::basic_string<char,std::char_traits<char>,std::allocator<char>>'
89>C:\Users\icub\sb\robotology\YARP\src\libYARP_dev\src\yarp/dev/Map2DArea.h(97): warning C4251: 'yarp::dev::Map2DArea::points': class 'std::vector<yarp::math::Vec2D<double>,std::allocator<_Ty>>' needs to have dll-interface to be used by clients of class 'yarp::dev::Map2DArea'
89> with
89> [
89> _Ty=yarp::math::Vec2D<double>
89> ]
89>C:\Users\icub\sb\robotology\YARP\src\libYARP_dev\src\yarp/dev/Map2DArea.h(35): note: see declaration of 'std::vector<yarp::math::Vec2D<double>,std::allocator<_Ty>>'
89> with
89> [
89> _Ty=yarp::math::Vec2D<double>
89> ]
89>C:\Users\icub\sb\build\robotology\YARP\src\devices\map2DClient\yarp_plugin_yarpmod_map2DClient.cpp(33): warning C4267: 'return': conversion from 'size_t' to 'int', possible loss of data
89>Map2DClient.cpp
88>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Port.h(248): warning C4996: 'yarp::os::Contactable::setCallbackLock': Use setCallbackLock with std::mutex instead
88>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Contactable.h(338): note: see declaration of 'yarp::os::Contactable::setCallbackLock'
88>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/AbstractContactable.h(148): warning C4996: 'yarp::os::Contactable::setCallbackLock': Use setCallbackLock with std::mutex instead
88>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Contactable.h(338): note: see declaration of 'yarp::os::Contactable::setCallbackLock'
88>C:\Users\icub\sb\robotology\YARP\src\libYARP_dev\src\yarp/dev/Map2DLocation.h(101): warning C4251: 'yarp::dev::Map2DLocation::map_id': class 'std::basic_string<char,std::char_traits<char>,std::allocator<char>>' needs to have dll-interface to be used by clients of struct 'yarp::dev::Map2DLocation'
88>C:\Program Files (x86)\Microsoft Visual Studio\2017\Enterprise\VC\Tools\MSVC\14.16.27023\include\xstring(4373): note: see declaration of 'std::basic_string<char,std::char_traits<char>,std::allocator<char>>'
88>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/BufferedPort.h(290): warning C4996: 'yarp::os::Contactable::setCallbackLock': Use setCallbackLock with std::mutex instead
88>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Contactable.h(338): note: see declaration of 'yarp::os::Contactable::setCallbackLock'
88>C:\Users\icub\sb\robotology\YARP\src\devices\localization2DServer\Localization2DServer.h(58): note: see reference to class template instantiation 'yarp::os::BufferedPort<yarp::os::Bottle>' being compiled
88>C:\Users\icub\sb\build\robotology\YARP\src\devices\localization2DServer\yarp_plugin_yarpmod_localization2DServer.cpp(33): warning C4267: 'return': conversion from 'size_t' to 'int', possible loss of data
88>Localization2DServer.cpp
90>yarp_plugin_yarpmod_map2DServer.cpp
90>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Port.h(248): warning C4996: 'yarp::os::Contactable::setCallbackLock': Use setCallbackLock with std::mutex instead
90>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Contactable.h(338): note: see declaration of 'yarp::os::Contactable::setCallbackLock'
90>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/AbstractContactable.h(148): warning C4996: 'yarp::os::Contactable::setCallbackLock': Use setCallbackLock with std::mutex instead
90>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Contactable.h(338): note: see declaration of 'yarp::os::Contactable::setCallbackLock'
90>C:\Users\icub\sb\robotology\YARP\src\libYARP_dev\src\yarp/dev/MapGrid2D.h(44): warning C4251: 'yarp::dev::MapGrid2D::m_map_occupancy': class 'yarp::sig::ImageOf<yarp::sig::PixelMono>' needs to have dll-interface to be used by clients of class 'yarp::dev::MapGrid2D'
90>C:\Users\icub\sb\robotology\YARP\src\libYARP_sig\src\yarp/sig/Image.h(632): note: see declaration of 'yarp::sig::ImageOf<yarp::sig::PixelMono>'
90>C:\Users\icub\sb\robotology\YARP\src\libYARP_dev\src\yarp/dev/MapGrid2D.h(45): warning C4251: 'yarp::dev::MapGrid2D::m_map_flags': class 'yarp::sig::ImageOf<yarp::sig::PixelMono>' needs to have dll-interface to be used by clients of class 'yarp::dev::MapGrid2D'
90>C:\Users\icub\sb\robotology\YARP\src\libYARP_sig\src\yarp/sig/Image.h(632): note: see declaration of 'yarp::sig::ImageOf<yarp::sig::PixelMono>'
90>C:\Users\icub\sb\robotology\YARP\src\libYARP_dev\src\yarp/dev/Map2DLocation.h(101): warning C4251: 'yarp::dev::Map2DLocation::map_id': class 'std::basic_string<char,std::char_traits<char>,std::allocator<char>>' needs to have dll-interface to be used by clients of struct 'yarp::dev::Map2DLocation'
90>C:\Program Files (x86)\Microsoft Visual Studio\2017\Enterprise\VC\Tools\MSVC\14.16.27023\include\xstring(4373): note: see declaration of 'std::basic_string<char,std::char_traits<char>,std::allocator<char>>'
90>C:\Users\icub\sb\robotology\YARP\src\libYARP_dev\src\yarp/dev/Map2DArea.h(96): warning C4251: 'yarp::dev::Map2DArea::map_id': class 'std::basic_string<char,std::char_traits<char>,std::allocator<char>>' needs to have dll-interface to be used by clients of class 'yarp::dev::Map2DArea'
90>C:\Program Files (x86)\Microsoft Visual Studio\2017\Enterprise\VC\Tools\MSVC\14.16.27023\include\xstring(4373): note: see declaration of 'std::basic_string<char,std::char_traits<char>,std::allocator<char>>'
90>C:\Users\icub\sb\robotology\YARP\src\libYARP_dev\src\yarp/dev/Map2DArea.h(97): warning C4251: 'yarp::dev::Map2DArea::points': class 'std::vector<yarp::math::Vec2D<double>,std::allocator<_Ty>>' needs to have dll-interface to be used by clients of class 'yarp::dev::Map2DArea'
90> with
90> [
90> _Ty=yarp::math::Vec2D<double>
90> ]
90>C:\Users\icub\sb\robotology\YARP\src\libYARP_dev\src\yarp/dev/Map2DArea.h(35): note: see declaration of 'std::vector<yarp::math::Vec2D<double>,std::allocator<_Ty>>'
90> with
90> [
90> _Ty=yarp::math::Vec2D<double>
90> ]
90>C:\Users\icub\sb\robotology\YARP\src\devices\map2DServer\Map2DServer.h(49): fatal error C1083: Cannot open include file: 'yarp/rosmsg/visualization_msgs/MarkerArray.h': No such file or directory
89>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Port.h(248): warning C4996: 'yarp::os::Contactable::setCallbackLock': Use setCallbackLock with std::mutex instead
89>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Contactable.h(338): note: see declaration of 'yarp::os::Contactable::setCallbackLock'
89>C:\Users\icub\sb\robotology\YARP\src\libYARP_dev\src\yarp/dev/MapGrid2D.h(44): warning C4251: 'yarp::dev::MapGrid2D::m_map_occupancy': class 'yarp::sig::ImageOf<yarp::sig::PixelMono>' needs to have dll-interface to be used by clients of class 'yarp::dev::MapGrid2D'
89>C:\Users\icub\sb\robotology\YARP\src\libYARP_sig\src\yarp/sig/Image.h(632): note: see declaration of 'yarp::sig::ImageOf<yarp::sig::PixelMono>'
89>C:\Users\icub\sb\robotology\YARP\src\libYARP_dev\src\yarp/dev/MapGrid2D.h(45): warning C4251: 'yarp::dev::MapGrid2D::m_map_flags': class 'yarp::sig::ImageOf<yarp::sig::PixelMono>' needs to have dll-interface to be used by clients of class 'yarp::dev::MapGrid2D'
89>C:\Users\icub\sb\robotology\YARP\src\libYARP_sig\src\yarp/sig/Image.h(632): note: see declaration of 'yarp::sig::ImageOf<yarp::sig::PixelMono>'
89>C:\Users\icub\sb\robotology\YARP\src\libYARP_dev\src\yarp/dev/Map2DLocation.h(101): warning C4251: 'yarp::dev::Map2DLocation::map_id': class 'std::basic_string<char,std::char_traits<char>,std::allocator<char>>' needs to have dll-interface to be used by clients of struct 'yarp::dev::Map2DLocation'
89>C:\Program Files (x86)\Microsoft Visual Studio\2017\Enterprise\VC\Tools\MSVC\14.16.27023\include\xstring(4373): note: see declaration of 'std::basic_string<char,std::char_traits<char>,std::allocator<char>>'
89>C:\Users\icub\sb\robotology\YARP\src\libYARP_dev\src\yarp/dev/Map2DArea.h(96): warning C4251: 'yarp::dev::Map2DArea::map_id': class 'std::basic_string<char,std::char_traits<char>,std::allocator<char>>' needs to have dll-interface to be used by clients of class 'yarp::dev::Map2DArea'
89>C:\Program Files (x86)\Microsoft Visual Studio\2017\Enterprise\VC\Tools\MSVC\14.16.27023\include\xstring(4373): note: see declaration of 'std::basic_string<char,std::char_traits<char>,std::allocator<char>>'
89>C:\Users\icub\sb\robotology\YARP\src\libYARP_dev\src\yarp/dev/Map2DArea.h(97): warning C4251: 'yarp::dev::Map2DArea::points': class 'std::vector<yarp::math::Vec2D<double>,std::allocator<_Ty>>' needs to have dll-interface to be used by clients of class 'yarp::dev::Map2DArea'
89> with
89> [
89> _Ty=yarp::math::Vec2D<double>
89> ]
89>C:\Users\icub\sb\robotology\YARP\src\libYARP_dev\src\yarp/dev/Map2DArea.h(35): note: see declaration of 'std::vector<yarp::math::Vec2D<double>,std::allocator<_Ty>>'
89> with
89> [
89> _Ty=yarp::math::Vec2D<double>
89> ]
87> Creating library C:/Users/icub/sb/build/robotology/YARP/lib/Release/yarp_localization2DClient.lib and object C:/Users/icub/sb/build/robotology/YARP/lib/Release/yarp_localization2DClient.exp
90>Map2DServer.cpp
88>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Port.h(248): warning C4996: 'yarp::os::Contactable::setCallbackLock': Use setCallbackLock with std::mutex instead
88>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Contactable.h(338): note: see declaration of 'yarp::os::Contactable::setCallbackLock'
88>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/AbstractContactable.h(148): warning C4996: 'yarp::os::Contactable::setCallbackLock': Use setCallbackLock with std::mutex instead
88>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Contactable.h(338): note: see declaration of 'yarp::os::Contactable::setCallbackLock'
88>C:\Users\icub\sb\robotology\YARP\src\libYARP_dev\src\yarp/dev/MapGrid2D.h(44): warning C4251: 'yarp::dev::MapGrid2D::m_map_occupancy': class 'yarp::sig::ImageOf<yarp::sig::PixelMono>' needs to have dll-interface to be used by clients of class 'yarp::dev::MapGrid2D'
88>C:\Users\icub\sb\robotology\YARP\src\libYARP_sig\src\yarp/sig/Image.h(632): note: see declaration of 'yarp::sig::ImageOf<yarp::sig::PixelMono>'
88>C:\Users\icub\sb\robotology\YARP\src\libYARP_dev\src\yarp/dev/MapGrid2D.h(45): warning C4251: 'yarp::dev::MapGrid2D::m_map_flags': class 'yarp::sig::ImageOf<yarp::sig::PixelMono>' needs to have dll-interface to be used by clients of class 'yarp::dev::MapGrid2D'
88>C:\Users\icub\sb\robotology\YARP\src\libYARP_sig\src\yarp/sig/Image.h(632): note: see declaration of 'yarp::sig::ImageOf<yarp::sig::PixelMono>'
88>C:\Users\icub\sb\robotology\YARP\src\libYARP_dev\src\yarp/dev/Map2DLocation.h(101): warning C4251: 'yarp::dev::Map2DLocation::map_id': class 'std::basic_string<char,std::char_traits<char>,std::allocator<char>>' needs to have dll-interface to be used by clients of struct 'yarp::dev::Map2DLocation'
88>C:\Program Files (x86)\Microsoft Visual Studio\2017\Enterprise\VC\Tools\MSVC\14.16.27023\include\xstring(4373): note: see declaration of 'std::basic_string<char,std::char_traits<char>,std::allocator<char>>'
88>C:\Users\icub\sb\robotology\YARP\src\libYARP_dev\src\yarp/dev/Map2DArea.h(96): warning C4251: 'yarp::dev::Map2DArea::map_id': class 'std::basic_string<char,std::char_traits<char>,std::allocator<char>>' needs to have dll-interface to be used by clients of class 'yarp::dev::Map2DArea'
88>C:\Program Files (x86)\Microsoft Visual Studio\2017\Enterprise\VC\Tools\MSVC\14.16.27023\include\xstring(4373): note: see declaration of 'std::basic_string<char,std::char_traits<char>,std::allocator<char>>'
88>C:\Users\icub\sb\robotology\YARP\src\libYARP_dev\src\yarp/dev/Map2DArea.h(97): warning C4251: 'yarp::dev::Map2DArea::points': class 'std::vector<yarp::math::Vec2D<double>,std::allocator<_Ty>>' needs to have dll-interface to be used by clients of class 'yarp::dev::Map2DArea'
88> with
88> [
88> _Ty=yarp::math::Vec2D<double>
88> ]
88>C:\Users\icub\sb\robotology\YARP\src\libYARP_dev\src\yarp/dev/Map2DArea.h(35): note: see declaration of 'std::vector<yarp::math::Vec2D<double>,std::allocator<_Ty>>'
88> with
88> [
88> _Ty=yarp::math::Vec2D<double>
88> ]
88>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/BufferedPort.h(290): warning C4996: 'yarp::os::Contactable::setCallbackLock': Use setCallbackLock with std::mutex instead
88>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Contactable.h(338): note: see declaration of 'yarp::os::Contactable::setCallbackLock'
88>c:\users\icub\sb\robotology\yarp\src\devices\localization2dserver\Localization2DServer.h(58): note: see reference to class template instantiation 'yarp::os::BufferedPort<yarp::os::Bottle>' being compiled
88>C:\Users\icub\sb\robotology\YARP\src\devices\localization2DServer\Localization2DServer.cpp(290): warning C4267: 'argument': conversion from 'size_t' to 'int32_t', possible loss of data
87>yarp_localization2DClient.vcxproj -> C:\Users\icub\sb\build\robotology\YARP\lib\yarp\Release\yarp_localization2DClient.dll
89>Generating Code...
88>Generating Code...
90>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Port.h(248): warning C4996: 'yarp::os::Contactable::setCallbackLock': Use setCallbackLock with std::mutex instead
90>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Contactable.h(338): note: see declaration of 'yarp::os::Contactable::setCallbackLock'
90>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/AbstractContactable.h(148): warning C4996: 'yarp::os::Contactable::setCallbackLock': Use setCallbackLock with std::mutex instead
90>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Contactable.h(338): note: see declaration of 'yarp::os::Contactable::setCallbackLock'
84>Done building project "yarp_grabberDual.vcxproj".
90>C:\Users\icub\sb\robotology\YARP\src\libYARP_dev\src\yarp/dev/MapGrid2D.h(44): warning C4251: 'yarp::dev::MapGrid2D::m_map_occupancy': class 'yarp::sig::ImageOf<yarp::sig::PixelMono>' needs to have dll-interface to be used by clients of class 'yarp::dev::MapGrid2D'
90>C:\Users\icub\sb\robotology\YARP\src\libYARP_sig\src\yarp/sig/Image.h(632): note: see declaration of 'yarp::sig::ImageOf<yarp::sig::PixelMono>'
90>C:\Users\icub\sb\robotology\YARP\src\libYARP_dev\src\yarp/dev/MapGrid2D.h(45): warning C4251: 'yarp::dev::MapGrid2D::m_map_flags': class 'yarp::sig::ImageOf<yarp::sig::PixelMono>' needs to have dll-interface to be used by clients of class 'yarp::dev::MapGrid2D'
90>C:\Users\icub\sb\robotology\YARP\src\libYARP_sig\src\yarp/sig/Image.h(632): note: see declaration of 'yarp::sig::ImageOf<yarp::sig::PixelMono>'
90>C:\Users\icub\sb\robotology\YARP\src\libYARP_dev\src\yarp/dev/Map2DLocation.h(101): warning C4251: 'yarp::dev::Map2DLocation::map_id': class 'std::basic_string<char,std::char_traits<char>,std::allocator<char>>' needs to have dll-interface to be used by clients of struct 'yarp::dev::Map2DLocation'
90>C:\Program Files (x86)\Microsoft Visual Studio\2017\Enterprise\VC\Tools\MSVC\14.16.27023\include\xstring(4373): note: see declaration of 'std::basic_string<char,std::char_traits<char>,std::allocator<char>>'
90>C:\Users\icub\sb\robotology\YARP\src\libYARP_dev\src\yarp/dev/Map2DArea.h(96): warning C4251: 'yarp::dev::Map2DArea::map_id': class 'std::basic_string<char,std::char_traits<char>,std::allocator<char>>' needs to have dll-interface to be used by clients of class 'yarp::dev::Map2DArea'
90>C:\Program Files (x86)\Microsoft Visual Studio\2017\Enterprise\VC\Tools\MSVC\14.16.27023\include\xstring(4373): note: see declaration of 'std::basic_string<char,std::char_traits<char>,std::allocator<char>>'
90>C:\Users\icub\sb\robotology\YARP\src\libYARP_dev\src\yarp/dev/Map2DArea.h(97): warning C4251: 'yarp::dev::Map2DArea::points': class 'std::vector<yarp::math::Vec2D<double>,std::allocator<_Ty>>' needs to have dll-interface to be used by clients of class 'yarp::dev::Map2DArea'
90> with
90> [
90> _Ty=yarp::math::Vec2D<double>
90> ]
90>C:\Users\icub\sb\robotology\YARP\src\libYARP_dev\src\yarp/dev/Map2DArea.h(35): note: see declaration of 'std::vector<yarp::math::Vec2D<double>,std::allocator<_Ty>>'
90> with
90> [
90> _Ty=yarp::math::Vec2D<double>
90> ]
90>c:\users\icub\sb\robotology\yarp\src\devices\map2dserver\Map2DServer.h(49): fatal error C1083: Cannot open include file: 'yarp/rosmsg/visualization_msgs/MarkerArray.h': No such file or directory
90>Generating Code...
90>Done building project "yarp_map2DServer.vcxproj" -- FAILED.
85>Done building project "yarp_group.vcxproj".
81> Creating library C:/Users/icub/sb/build/robotology/YARP/lib/Release/yarp_controlboardremapper.lib and object C:/Users/icub/sb/build/robotology/YARP/lib/Release/yarp_controlboardremapper.exp
81>yarp_controlboardremapper.vcxproj -> C:\Users\icub\sb\build\robotology\YARP\lib\yarp\Release\yarp_controlboardremapper.dll
91>------ Build started: Project: yarp_multipleanalogsensorsclient, Configuration: Release x64 ------
66>Done building project "yarprobotinterface.vcxproj".
88> Creating library C:/Users/icub/sb/build/robotology/YARP/lib/Release/yarp_localization2DServer.lib and object C:/Users/icub/sb/build/robotology/YARP/lib/Release/yarp_localization2DServer.exp
92>------ Build started: Project: yarp_multipleanalogsensorsremapper, Configuration: Release x64 ------
93>------ Build started: Project: yarp_multipleanalogsensorsserver, Configuration: Release x64 ------
94>------ Build started: Project: yarp_navigation2DClient, Configuration: Release x64 ------
88>yarp_localization2DServer.vcxproj -> C:\Users\icub\sb\build\robotology\YARP\lib\yarp\Release\yarp_localization2DServer.dll
91>Building Custom Rule C:/Users/icub/sb/robotology/YARP/src/devices/multipleanalogsensorsclient/CMakeLists.txt
91>CMake does not need to re-run because C:/Users/icub/sb/build/robotology/YARP/src/devices/multipleanalogsensorsclient/CMakeFiles/generate.stamp is up-to-date.
91>yarp_plugin_yarpmod_multipleanalogsensorsclient.cpp
94>Building Custom Rule C:/Users/icub/sb/robotology/YARP/src/devices/navigation2DClient/CMakeLists.txt
92>Building Custom Rule C:/Users/icub/sb/robotology/YARP/src/devices/multipleanalogsensorsremapper/CMakeLists.txt
93>Building Custom Rule C:/Users/icub/sb/robotology/YARP/src/devices/multipleanalogsensorsserver/CMakeLists.txt
92>CMake does not need to re-run because C:/Users/icub/sb/build/robotology/YARP/src/devices/multipleanalogsensorsremapper/CMakeFiles/generate.stamp is up-to-date.
94>CMake does not need to re-run because C:/Users/icub/sb/build/robotology/YARP/src/devices/navigation2DClient/CMakeFiles/generate.stamp is up-to-date.
93>CMake does not need to re-run because C:/Users/icub/sb/build/robotology/YARP/src/devices/multipleanalogsensorsserver/CMakeFiles/generate.stamp is up-to-date.
92>yarp_plugin_yarpmod_multipleanalogsensorsremapper.cpp
94>yarp_plugin_yarpmod_navigation2DClient.cpp
93>yarp_plugin_yarpmod_multipleanalogsensorsserver.cpp
91>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Port.h(248): warning C4996: 'yarp::os::Contactable::setCallbackLock': Use setCallbackLock with std::mutex instead
91>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Contactable.h(338): note: see declaration of 'yarp::os::Contactable::setCallbackLock'
91>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/BufferedPort.h(290): warning C4996: 'yarp::os::Contactable::setCallbackLock': Use setCallbackLock with std::mutex instead
91>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Contactable.h(338): note: see declaration of 'yarp::os::Contactable::setCallbackLock'
91>C:\Users\icub\sb\robotology\YARP\src\devices\multipleanalogsensorsclient\MultipleAnalogSensorsClient.h(26): note: see reference to class template instantiation 'yarp::os::BufferedPort<SensorStreamingData>' being compiled
91>C:\Users\icub\sb\build\robotology\YARP\src\devices\multipleanalogsensorsclient\yarp_plugin_yarpmod_multipleanalogsensorsclient.cpp(33): warning C4267: 'return': conversion from 'size_t' to 'int', possible loss of data
87>Done building project "yarp_localization2DClient.vcxproj".
95>------ Build started: Project: yarp_navigation2DServer, Configuration: Release x64 ------
92>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Port.h(248): warning C4996: 'yarp::os::Contactable::setCallbackLock': Use setCallbackLock with std::mutex instead
92>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Contactable.h(338): note: see declaration of 'yarp::os::Contactable::setCallbackLock'
91>MultipleAnalogSensorsClient.cpp
94>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Port.h(248): warning C4996: 'yarp::os::Contactable::setCallbackLock': Use setCallbackLock with std::mutex instead
94>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Contactable.h(338): note: see declaration of 'yarp::os::Contactable::setCallbackLock'
93>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Port.h(248): warning C4996: 'yarp::os::Contactable::setCallbackLock': Use setCallbackLock with std::mutex instead
93>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Contactable.h(338): note: see declaration of 'yarp::os::Contactable::setCallbackLock'
92>C:\Users\icub\sb\build\robotology\YARP\src\devices\multipleanalogsensorsremapper\yarp_plugin_yarpmod_multipleanalogsensorsremapper.cpp(33): warning C4267: 'return': conversion from 'size_t' to 'int', possible loss of data
81>Done building project "yarp_controlboardremapper.vcxproj".
96>------ Build started: Project: yarp_pipe, Configuration: Release x64 ------
94>C:\Users\icub\sb\robotology\YARP\src\libYARP_dev\src\yarp/dev/Map2DLocation.h(101): warning C4251: 'yarp::dev::Map2DLocation::map_id': class 'std::basic_string<char,std::char_traits<char>,std::allocator<char>>' needs to have dll-interface to be used by clients of struct 'yarp::dev::Map2DLocation'
94>C:\Program Files (x86)\Microsoft Visual Studio\2017\Enterprise\VC\Tools\MSVC\14.16.27023\include\xstring(4373): note: see declaration of 'std::basic_string<char,std::char_traits<char>,std::allocator<char>>'
94>C:\Users\icub\sb\robotology\YARP\src\libYARP_dev\src\yarp/dev/Map2DArea.h(96): warning C4251: 'yarp::dev::Map2DArea::map_id': class 'std::basic_string<char,std::char_traits<char>,std::allocator<char>>' needs to have dll-interface to be used by clients of class 'yarp::dev::Map2DArea'
94>C:\Program Files (x86)\Microsoft Visual Studio\2017\Enterprise\VC\Tools\MSVC\14.16.27023\include\xstring(4373): note: see declaration of 'std::basic_string<char,std::char_traits<char>,std::allocator<char>>'
94>C:\Users\icub\sb\robotology\YARP\src\libYARP_dev\src\yarp/dev/Map2DArea.h(97): warning C4251: 'yarp::dev::Map2DArea::points': class 'std::vector<yarp::math::Vec2D<double>,std::allocator<_Ty>>' needs to have dll-interface to be used by clients of class 'yarp::dev::Map2DArea'
94> with
94> [
94> _Ty=yarp::math::Vec2D<double>
94> ]
94>C:\Users\icub\sb\robotology\YARP\src\libYARP_dev\src\yarp/dev/Map2DArea.h(35): note: see declaration of 'std::vector<yarp::math::Vec2D<double>,std::allocator<_Ty>>'
94> with
94> [
94> _Ty=yarp::math::Vec2D<double>
94> ]
94>C:\Users\icub\sb\robotology\YARP\src\libYARP_dev\src\yarp/dev/MapGrid2D.h(44): warning C4251: 'yarp::dev::MapGrid2D::m_map_occupancy': class 'yarp::sig::ImageOf<yarp::sig::PixelMono>' needs to have dll-interface to be used by clients of class 'yarp::dev::MapGrid2D'
94>C:\Users\icub\sb\robotology\YARP\src\libYARP_sig\src\yarp/sig/Image.h(632): note: see declaration of 'yarp::sig::ImageOf<yarp::sig::PixelMono>'
94>C:\Users\icub\sb\robotology\YARP\src\libYARP_dev\src\yarp/dev/MapGrid2D.h(45): warning C4251: 'yarp::dev::MapGrid2D::m_map_flags': class 'yarp::sig::ImageOf<yarp::sig::PixelMono>' needs to have dll-interface to be used by clients of class 'yarp::dev::MapGrid2D'
94>C:\Users\icub\sb\robotology\YARP\src\libYARP_sig\src\yarp/sig/Image.h(632): note: see declaration of 'yarp::sig::ImageOf<yarp::sig::PixelMono>'
94>C:\Users\icub\sb\build\robotology\YARP\src\devices\navigation2DClient\yarp_plugin_yarpmod_navigation2DClient.cpp(33): warning C4267: 'return': conversion from 'size_t' to 'int', possible loss of data
94>Navigation2DClient.cpp
93>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/BufferedPort.h(290): warning C4996: 'yarp::os::Contactable::setCallbackLock': Use setCallbackLock with std::mutex instead
93>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Contactable.h(338): note: see declaration of 'yarp::os::Contactable::setCallbackLock'
93>C:\Users\icub\sb\robotology\YARP\src\devices\multipleanalogsensorsserver\MultipleAnalogSensorsServer.h(47): note: see reference to class template instantiation 'yarp::os::BufferedPort<SensorStreamingData>' being compiled
93>C:\Users\icub\sb\build\robotology\YARP\src\devices\multipleanalogsensorsserver\yarp_plugin_yarpmod_multipleanalogsensorsserver.cpp(33): warning C4267: 'return': conversion from 'size_t' to 'int', possible loss of data
93>MultipleAnalogSensorsServer.cpp
92>MultipleAnalogSensorsRemapper.cpp
95>Building Custom Rule C:/Users/icub/sb/robotology/YARP/src/devices/navigation2DServer/CMakeLists.txt
95>CMake does not need to re-run because C:/Users/icub/sb/build/robotology/YARP/src/devices/navigation2DServer/CMakeFiles/generate.stamp is up-to-date.
95>yarp_plugin_yarpmod_navigation2DServer.cpp
91>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Port.h(248): warning C4996: 'yarp::os::Contactable::setCallbackLock': Use setCallbackLock with std::mutex instead
91>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Contactable.h(338): note: see declaration of 'yarp::os::Contactable::setCallbackLock'
91>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/BufferedPort.h(290): warning C4996: 'yarp::os::Contactable::setCallbackLock': Use setCallbackLock with std::mutex instead
91>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Contactable.h(338): note: see declaration of 'yarp::os::Contactable::setCallbackLock'
91>c:\users\icub\sb\robotology\yarp\src\devices\multipleanalogsensorsclient\MultipleAnalogSensorsClient.h(26): note: see reference to class template instantiation 'yarp::os::BufferedPort<SensorStreamingData>' being compiled
89> Creating library C:/Users/icub/sb/build/robotology/YARP/lib/Release/yarp_map2DClient.lib and object C:/Users/icub/sb/build/robotology/YARP/lib/Release/yarp_map2DClient.exp
91>Generating Code...
96>Building Custom Rule C:/Users/icub/sb/robotology/YARP/src/devices/DevicePipe/CMakeLists.txt
96>CMake does not need to re-run because C:/Users/icub/sb/build/robotology/YARP/src/devices/DevicePipe/CMakeFiles/generate.stamp is up-to-date.
92>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Port.h(248): warning C4996: 'yarp::os::Contactable::setCallbackLock': Use setCallbackLock with std::mutex instead
94>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Port.h(248): warning C4996: 'yarp::os::Contactable::setCallbackLock': Use setCallbackLock with std::mutex instead
93>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Port.h(248): warning C4996: 'yarp::os::Contactable::setCallbackLock': Use setCallbackLock with std::mutex instead
88>Done building project "yarp_localization2DServer.vcxproj".
97>------ Build started: Project: yarp_remote_controlboard, Configuration: Release x64 ------
94>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Contactable.h(338): note: see declaration of 'yarp::os::Contactable::setCallbackLock'
94>C:\Users\icub\sb\robotology\YARP\src\libYARP_dev\src\yarp/dev/Map2DLocation.h(101): warning C4251: 'yarp::dev::Map2DLocation::map_id': class 'std::basic_string<char,std::char_traits<char>,std::allocator<char>>' needs to have dll-interface to be used by clients of struct 'yarp::dev::Map2DLocation'
94>C:\Program Files (x86)\Microsoft Visual Studio\2017\Enterprise\VC\Tools\MSVC\14.16.27023\include\xstring(4373): note: see declaration of 'std::basic_string<char,std::char_traits<char>,std::allocator<char>>'
94>C:\Users\icub\sb\robotology\YARP\src\libYARP_dev\src\yarp/dev/Map2DArea.h(96): warning C4251: 'yarp::dev::Map2DArea::map_id': class 'std::basic_string<char,std::char_traits<char>,std::allocator<char>>' needs to have dll-interface to be used by clients of class 'yarp::dev::Map2DArea'
94>C:\Program Files (x86)\Microsoft Visual Studio\2017\Enterprise\VC\Tools\MSVC\14.16.27023\include\xstring(4373): note: see declaration of 'std::basic_string<char,std::char_traits<char>,std::allocator<char>>'
94>C:\Users\icub\sb\robotology\YARP\src\libYARP_dev\src\yarp/dev/Map2DArea.h(97): warning C4251: 'yarp::dev::Map2DArea::points': class 'std::vector<yarp::math::Vec2D<double>,std::allocator<_Ty>>' needs to have dll-interface to be used by clients of class 'yarp::dev::Map2DArea'
94> with
94> [
94> _Ty=yarp::math::Vec2D<double>
94> ]
94>C:\Users\icub\sb\robotology\YARP\src\libYARP_dev\src\yarp/dev/Map2DArea.h(35): note: see declaration of 'std::vector<yarp::math::Vec2D<double>,std::allocator<_Ty>>'
94> with
94> [
94> _Ty=yarp::math::Vec2D<double>
94> ]
94>C:\Users\icub\sb\robotology\YARP\src\libYARP_dev\src\yarp/dev/MapGrid2D.h(44): warning C4251: 'yarp::dev::MapGrid2D::m_map_occupancy': class 'yarp::sig::ImageOf<yarp::sig::PixelMono>' needs to have dll-interface to be used by clients of class 'yarp::dev::MapGrid2D'
94>C:\Users\icub\sb\robotology\YARP\src\libYARP_sig\src\yarp/sig/Image.h(632): note: see declaration of 'yarp::sig::ImageOf<yarp::sig::PixelMono>'
94>C:\Users\icub\sb\robotology\YARP\src\libYARP_dev\src\yarp/dev/MapGrid2D.h(45): warning C4251: 'yarp::dev::MapGrid2D::m_map_flags': class 'yarp::sig::ImageOf<yarp::sig::PixelMono>' needs to have dll-interface to be used by clients of class 'yarp::dev::MapGrid2D'
94>C:\Users\icub\sb\robotology\YARP\src\libYARP_sig\src\yarp/sig/Image.h(632): note: see declaration of 'yarp::sig::ImageOf<yarp::sig::PixelMono>'
94>Generating Code...
92>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Contactable.h(338): note: see declaration of 'yarp::os::Contactable::setCallbackLock'
92>C:\Users\icub\sb\robotology\YARP\src\devices\multipleanalogsensorsremapper\MultipleAnalogSensorsRemapper.cpp(176): warning C4267: 'argument': conversion from 'size_t' to 'int', possible loss of data
92>C:\Users\icub\sb\robotology\YARP\src\devices\multipleanalogsensorsremapper\MultipleAnalogSensorsRemapper.cpp(211): note: see reference to function template instantiation 'bool MultipleAnalogSensorsRemapper::genericAttachAll<yarp::dev::IThreeAxisGyroscopes>(const MAS_SensorType,std::vector<yarp::dev::IThreeAxisGyroscopes *,std::allocator<_Ty>> &,const yarp::dev::PolyDriverList &,bool (__cdecl yarp::dev::IThreeAxisGyroscopes::* )(size_t,std::string &) const,size_t (__cdecl yarp::dev::IThreeAxisGyroscopes::* )(void) const)' being compiled
92> with
92> [
92> _Ty=yarp::dev::IThreeAxisGyroscopes *
92> ]
92>Generating Code...
96>yarp_plugin_yarpmod_pipe.cpp
96>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Port.h(248): warning C4996: 'yarp::os::Contactable::setCallbackLock': Use setCallbackLock with std::mutex instead
96>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Contactable.h(338): note: see declaration of 'yarp::os::Contactable::setCallbackLock'
96>C:\Users\icub\sb\build\robotology\YARP\src\devices\DevicePipe\yarp_plugin_yarpmod_pipe.cpp(33): warning C4267: 'return': conversion from 'size_t' to 'int', possible loss of data
89>yarp_map2DClient.vcxproj -> C:\Users\icub\sb\build\robotology\YARP\lib\yarp\Release\yarp_map2DClient.dll
93>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Contactable.h(338): note: see declaration of 'yarp::os::Contactable::setCallbackLock'
93>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/BufferedPort.h(290): warning C4996: 'yarp::os::Contactable::setCallbackLock': Use setCallbackLock with std::mutex instead
93>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Contactable.h(338): note: see declaration of 'yarp::os::Contactable::setCallbackLock'
93>c:\users\icub\sb\robotology\yarp\src\devices\multipleanalogsensorsserver\MultipleAnalogSensorsServer.h(47): note: see reference to class template instantiation 'yarp::os::BufferedPort<SensorStreamingData>' being compiled
93>Generating Code...
95>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Port.h(248): warning C4996: 'yarp::os::Contactable::setCallbackLock': Use setCallbackLock with std::mutex instead
95>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Contactable.h(338): note: see declaration of 'yarp::os::Contactable::setCallbackLock'
95>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/AbstractContactable.h(148): warning C4996: 'yarp::os::Contactable::setCallbackLock': Use setCallbackLock with std::mutex instead
95>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Contactable.h(338): note: see declaration of 'yarp::os::Contactable::setCallbackLock'
95>C:\Users\icub\sb\robotology\YARP\src\libYARP_dev\src\yarp/dev/Map2DLocation.h(101): warning C4251: 'yarp::dev::Map2DLocation::map_id': class 'std::basic_string<char,std::char_traits<char>,std::allocator<char>>' needs to have dll-interface to be used by clients of struct 'yarp::dev::Map2DLocation'
95>C:\Program Files (x86)\Microsoft Visual Studio\2017\Enterprise\VC\Tools\MSVC\14.16.27023\include\xstring(4373): note: see declaration of 'std::basic_string<char,std::char_traits<char>,std::allocator<char>>'
95>C:\Users\icub\sb\robotology\YARP\src\libYARP_dev\src\yarp/dev/Map2DArea.h(96): warning C4251: 'yarp::dev::Map2DArea::map_id': class 'std::basic_string<char,std::char_traits<char>,std::allocator<char>>' needs to have dll-interface to be used by clients of class 'yarp::dev::Map2DArea'
95>C:\Program Files (x86)\Microsoft Visual Studio\2017\Enterprise\VC\Tools\MSVC\14.16.27023\include\xstring(4373): note: see declaration of 'std::basic_string<char,std::char_traits<char>,std::allocator<char>>'
95>C:\Users\icub\sb\robotology\YARP\src\libYARP_dev\src\yarp/dev/Map2DArea.h(97): warning C4251: 'yarp::dev::Map2DArea::points': class 'std::vector<yarp::math::Vec2D<double>,std::allocator<_Ty>>' needs to have dll-interface to be used by clients of class 'yarp::dev::Map2DArea'
95> with
95> [
95> _Ty=yarp::math::Vec2D<double>
95> ]
95>C:\Users\icub\sb\robotology\YARP\src\libYARP_dev\src\yarp/dev/Map2DArea.h(35): note: see declaration of 'std::vector<yarp::math::Vec2D<double>,std::allocator<_Ty>>'
95> with
95> [
95> _Ty=yarp::math::Vec2D<double>
95> ]
95>C:\Users\icub\sb\robotology\YARP\src\libYARP_dev\src\yarp/dev/MapGrid2D.h(44): warning C4251: 'yarp::dev::MapGrid2D::m_map_occupancy': class 'yarp::sig::ImageOf<yarp::sig::PixelMono>' needs to have dll-interface to be used by clients of class 'yarp::dev::MapGrid2D'
95>C:\Users\icub\sb\robotology\YARP\src\libYARP_sig\src\yarp/sig/Image.h(632): note: see declaration of 'yarp::sig::ImageOf<yarp::sig::PixelMono>'
95>C:\Users\icub\sb\robotology\YARP\src\libYARP_dev\src\yarp/dev/MapGrid2D.h(45): warning C4251: 'yarp::dev::MapGrid2D::m_map_flags': class 'yarp::sig::ImageOf<yarp::sig::PixelMono>' needs to have dll-interface to be used by clients of class 'yarp::dev::MapGrid2D'
95>C:\Users\icub\sb\robotology\YARP\src\libYARP_sig\src\yarp/sig/Image.h(632): note: see declaration of 'yarp::sig::ImageOf<yarp::sig::PixelMono>'
95>C:\Users\icub\sb\build\robotology\YARP\src\devices\navigation2DServer\yarp_plugin_yarpmod_navigation2DServer.cpp(33): warning C4267: 'return': conversion from 'size_t' to 'int', possible loss of data
95>navigation2DServer.cpp
91> Creating library C:/Users/icub/sb/build/robotology/YARP/lib/Release/yarp_multipleanalogsensorsclient.lib and object C:/Users/icub/sb/build/robotology/YARP/lib/Release/yarp_multipleanalogsensorsclient.exp
96>DevicePipe.cpp
91>yarp_multipleanalogsensorsclient.vcxproj -> C:\Users\icub\sb\build\robotology\YARP\lib\yarp\Release\yarp_multipleanalogsensorsclient.dll
95>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Port.h(248): warning C4996: 'yarp::os::Contactable::setCallbackLock': Use setCallbackLock with std::mutex instead
95>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Contactable.h(338): note: see declaration of 'yarp::os::Contactable::setCallbackLock'
95>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/AbstractContactable.h(148): warning C4996: 'yarp::os::Contactable::setCallbackLock': Use setCallbackLock with std::mutex instead
95>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Contactable.h(338): note: see declaration of 'yarp::os::Contactable::setCallbackLock'
95>C:\Users\icub\sb\robotology\YARP\src\libYARP_dev\src\yarp/dev/Map2DLocation.h(101): warning C4251: 'yarp::dev::Map2DLocation::map_id': class 'std::basic_string<char,std::char_traits<char>,std::allocator<char>>' needs to have dll-interface to be used by clients of struct 'yarp::dev::Map2DLocation'
95>C:\Program Files (x86)\Microsoft Visual Studio\2017\Enterprise\VC\Tools\MSVC\14.16.27023\include\xstring(4373): note: see declaration of 'std::basic_string<char,std::char_traits<char>,std::allocator<char>>'
95>C:\Users\icub\sb\robotology\YARP\src\libYARP_dev\src\yarp/dev/Map2DArea.h(96): warning C4251: 'yarp::dev::Map2DArea::map_id': class 'std::basic_string<char,std::char_traits<char>,std::allocator<char>>' needs to have dll-interface to be used by clients of class 'yarp::dev::Map2DArea'
95>C:\Program Files (x86)\Microsoft Visual Studio\2017\Enterprise\VC\Tools\MSVC\14.16.27023\include\xstring(4373): note: see declaration of 'std::basic_string<char,std::char_traits<char>,std::allocator<char>>'
95>C:\Users\icub\sb\robotology\YARP\src\libYARP_dev\src\yarp/dev/Map2DArea.h(97): warning C4251: 'yarp::dev::Map2DArea::points': class 'std::vector<yarp::math::Vec2D<double>,std::allocator<_Ty>>' needs to have dll-interface to be used by clients of class 'yarp::dev::Map2DArea'
95> with
95> [
95> _Ty=yarp::math::Vec2D<double>
95> ]
95>C:\Users\icub\sb\robotology\YARP\src\libYARP_dev\src\yarp/dev/Map2DArea.h(35): note: see declaration of 'std::vector<yarp::math::Vec2D<double>,std::allocator<_Ty>>'
95> with
95> [
95> _Ty=yarp::math::Vec2D<double>
95> ]
95>C:\Users\icub\sb\robotology\YARP\src\libYARP_dev\src\yarp/dev/MapGrid2D.h(44): warning C4251: 'yarp::dev::MapGrid2D::m_map_occupancy': class 'yarp::sig::ImageOf<yarp::sig::PixelMono>' needs to have dll-interface to be used by clients of class 'yarp::dev::MapGrid2D'
95>C:\Users\icub\sb\robotology\YARP\src\libYARP_sig\src\yarp/sig/Image.h(632): note: see declaration of 'yarp::sig::ImageOf<yarp::sig::PixelMono>'
95>C:\Users\icub\sb\robotology\YARP\src\libYARP_dev\src\yarp/dev/MapGrid2D.h(45): warning C4251: 'yarp::dev::MapGrid2D::m_map_flags': class 'yarp::sig::ImageOf<yarp::sig::PixelMono>' needs to have dll-interface to be used by clients of class 'yarp::dev::MapGrid2D'
95>C:\Users\icub\sb\robotology\YARP\src\libYARP_sig\src\yarp/sig/Image.h(632): note: see declaration of 'yarp::sig::ImageOf<yarp::sig::PixelMono>'
93> Creating library C:/Users/icub/sb/build/robotology/YARP/lib/Release/yarp_multipleanalogsensorsserver.lib and object C:/Users/icub/sb/build/robotology/YARP/lib/Release/yarp_multipleanalogsensorsserver.exp
97>Building Custom Rule C:/Users/icub/sb/robotology/YARP/src/devices/RemoteControlBoard/CMakeLists.txt
97>CMake does not need to re-run because C:/Users/icub/sb/build/robotology/YARP/src/devices/RemoteControlBoard/CMakeFiles/generate.stamp is up-to-date.
97>yarp_plugin_yarpmod_remote_controlboard.cpp
94> Creating library C:/Users/icub/sb/build/robotology/YARP/lib/Release/yarp_navigation2DClient.lib and object C:/Users/icub/sb/build/robotology/YARP/lib/Release/yarp_navigation2DClient.exp
94>yarp_navigation2DClient.vcxproj -> C:\Users\icub\sb\build\robotology\YARP\lib\yarp\Release\yarp_navigation2DClient.dll
96>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Port.h(248): warning C4996: 'yarp::os::Contactable::setCallbackLock': Use setCallbackLock with std::mutex instead
96>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Contactable.h(338): note: see declaration of 'yarp::os::Contactable::setCallbackLock'
95>Generating Code...
93>yarp_multipleanalogsensorsserver.vcxproj -> C:\Users\icub\sb\build\robotology\YARP\lib\yarp\Release\yarp_multipleanalogsensorsserver.dll
96>Generating Code...
97>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Port.h(248): warning C4996: 'yarp::os::Contactable::setCallbackLock': Use setCallbackLock with std::mutex instead
95> Creating library C:/Users/icub/sb/build/robotology/YARP/lib/Release/yarp_navigation2DServer.lib and object C:/Users/icub/sb/build/robotology/YARP/lib/Release/yarp_navigation2DServer.exp
97>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Contactable.h(338): note: see declaration of 'yarp::os::Contactable::setCallbackLock'
89>Done building project "yarp_map2DClient.vcxproj".
98>------ Build started: Project: yarp_remote_grabber, Configuration: Release x64 ------
97>C:\Users\icub\sb\robotology\YARP\src\libYARP_dev\src\idl_generated_code\yarp/dev/impl/jointData.h(50): warning C4251: 'yarp::dev::impl::jointData::controlMode': class 'yarp::sig::VectorOf<int>' needs to have dll-interface to be used by clients of class 'yarp::dev::impl::jointData'
97>C:\Users\icub\sb\robotology\YARP\src\libYARP_dev\src\idl_generated_code\yarp/dev/impl/jointData.h(50): note: see declaration of 'yarp::sig::VectorOf<int>'
97>C:\Users\icub\sb\robotology\YARP\src\libYARP_dev\src\idl_generated_code\yarp/dev/impl/jointData.h(52): warning C4251: 'yarp::dev::impl::jointData::interactionMode': class 'yarp::sig::VectorOf<int>' needs to have dll-interface to be used by clients of class 'yarp::dev::impl::jointData'
97>C:\Users\icub\sb\robotology\YARP\src\libYARP_dev\src\idl_generated_code\yarp/dev/impl/jointData.h(50): note: see declaration of 'yarp::sig::VectorOf<int>'
97>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/BufferedPort.h(290): warning C4996: 'yarp::os::Contactable::setCallbackLock': Use setCallbackLock with std::mutex instead
97>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Contactable.h(338): note: see declaration of 'yarp::os::Contactable::setCallbackLock'
97>c:\users\icub\sb\robotology\yarp\src\devices\remotecontrolboard\stateExtendedReader.h(44): note: see reference to class template instantiation 'yarp::os::BufferedPort<yarp::dev::impl::jointData>' being compiled
97>C:\Users\icub\sb\build\robotology\YARP\src\devices\RemoteControlBoard\yarp_plugin_yarpmod_remote_controlboard.cpp(33): warning C4267: 'return': conversion from 'size_t' to 'int', possible loss of data
97>RemoteControlBoard.cpp
92> Creating library C:/Users/icub/sb/build/robotology/YARP/lib/Release/yarp_multipleanalogsensorsremapper.lib and object C:/Users/icub/sb/build/robotology/YARP/lib/Release/yarp_multipleanalogsensorsremapper.exp
92>yarp_multipleanalogsensorsremapper.vcxproj -> C:\Users\icub\sb\build\robotology\YARP\lib\yarp\Release\yarp_multipleanalogsensorsremapper.dll
96> Creating library C:/Users/icub/sb/build/robotology/YARP/lib/Release/yarp_pipe.lib and object C:/Users/icub/sb/build/robotology/YARP/lib/Release/yarp_pipe.exp
96>yarp_pipe.vcxproj -> C:\Users\icub\sb\build\robotology\YARP\lib\yarp\Release\yarp_pipe.dll
95>yarp_navigation2DServer.vcxproj -> C:\Users\icub\sb\build\robotology\YARP\lib\yarp\Release\yarp_navigation2DServer.dll
98>Building Custom Rule C:/Users/icub/sb/robotology/YARP/src/devices/RemoteFrameGrabber/CMakeLists.txt
98>CMake does not need to re-run because C:/Users/icub/sb/build/robotology/YARP/src/devices/RemoteFrameGrabber/CMakeFiles/generate.stamp is up-to-date.
98>yarp_plugin_yarpmod_remote_grabber.cpp
97>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Port.h(248): warning C4996: 'yarp::os::Contactable::setCallbackLock': Use setCallbackLock with std::mutex instead
97>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Contactable.h(338): note: see declaration of 'yarp::os::Contactable::setCallbackLock'
91>Done building project "yarp_multipleanalogsensorsclient.vcxproj".
99>------ Build started: Project: yarp_robotDescriptionClient, Configuration: Release x64 ------
97>C:\Users\icub\sb\robotology\YARP\src\libYARP_dev\src\idl_generated_code\yarp/dev/impl/jointData.h(50): warning C4251: 'yarp::dev::impl::jointData::controlMode': class 'yarp::sig::VectorOf<int>' needs to have dll-interface to be used by clients of class 'yarp::dev::impl::jointData'
97>C:\Users\icub\sb\robotology\YARP\src\libYARP_dev\src\idl_generated_code\yarp/dev/impl/jointData.h(50): note: see declaration of 'yarp::sig::VectorOf<int>'
97>C:\Users\icub\sb\robotology\YARP\src\libYARP_dev\src\idl_generated_code\yarp/dev/impl/jointData.h(52): warning C4251: 'yarp::dev::impl::jointData::interactionMode': class 'yarp::sig::VectorOf<int>' needs to have dll-interface to be used by clients of class 'yarp::dev::impl::jointData'
97>C:\Users\icub\sb\robotology\YARP\src\libYARP_dev\src\idl_generated_code\yarp/dev/impl/jointData.h(50): note: see declaration of 'yarp::sig::VectorOf<int>'
97>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/BufferedPort.h(290): warning C4996: 'yarp::os::Contactable::setCallbackLock': Use setCallbackLock with std::mutex instead
97>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Contactable.h(338): note: see declaration of 'yarp::os::Contactable::setCallbackLock'
97>c:\users\icub\sb\robotology\yarp\src\devices\remotecontrolboard\stateExtendedReader.h(44): note: see reference to class template instantiation 'yarp::os::BufferedPort<yarp::dev::impl::jointData>' being compiled
97>stateExtendedReader.cpp
98>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Port.h(248): warning C4996: 'yarp::os::Contactable::setCallbackLock': Use setCallbackLock with std::mutex instead
98>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Contactable.h(338): note: see declaration of 'yarp::os::Contactable::setCallbackLock'
98>C:\Users\icub\sb\robotology\YARP\src\devices\RemoteFrameGrabber\RemoteFrameGrabber.h(509): warning C4996: 'yarp::dev::IFrameGrabberControls::setBrightness': Use setFeature(YARP_FEATURE_BRIGHTNESS, v) instead
94>Done building project "yarp_navigation2DClient.vcxproj".
100>------ Build started: Project: yarp_robotDescriptionServer, Configuration: Release x64 ------
98>C:\Users\icub\sb\robotology\YARP\src\libYARP_dev\src\yarp/dev/FrameGrabberInterfaces.h(379): note: see declaration of 'yarp::dev::IFrameGrabberControls::setBrightness'
98>C:\Users\icub\sb\robotology\YARP\src\devices\RemoteFrameGrabber\RemoteFrameGrabber.h(513): warning C4996: 'yarp::dev::IFrameGrabberControls::getBrightness': Use getFeature(YARP_FEATURE_BRIGHTNESS, v) instead
98>C:\Users\icub\sb\robotology\YARP\src\libYARP_dev\src\yarp/dev/FrameGrabberInterfaces.h(451): note: see declaration of 'yarp::dev::IFrameGrabberControls::getBrightness'
98>C:\Users\icub\sb\robotology\YARP\src\devices\RemoteFrameGrabber\RemoteFrameGrabber.h(517): warning C4996: 'yarp::dev::IFrameGrabberControls::setExposure': Use setFeature(YARP_FEATURE_EXPOSURE, v) instead
98>C:\Users\icub\sb\robotology\YARP\src\libYARP_dev\src\yarp/dev/FrameGrabberInterfaces.h(386): note: see declaration of 'yarp::dev::IFrameGrabberControls::setExposure'
98>C:\Users\icub\sb\robotology\YARP\src\devices\RemoteFrameGrabber\RemoteFrameGrabber.h(521): warning C4996: 'yarp::dev::IFrameGrabberControls::getExposure': Use getFeature(YARP_FEATURE_EXPOSURE, v) instead
98>C:\Users\icub\sb\robotology\YARP\src\libYARP_dev\src\yarp/dev/FrameGrabberInterfaces.h(457): note: see declaration of 'yarp::dev::IFrameGrabberControls::getExposure'
98>C:\Users\icub\sb\robotology\YARP\src\devices\RemoteFrameGrabber\RemoteFrameGrabber.h(526): warning C4996: 'yarp::dev::IFrameGrabberControls::setSharpness': Use setFeature(YARP_FEATURE_SHARPNESS, v) instead
98>C:\Users\icub\sb\robotology\YARP\src\libYARP_dev\src\yarp/dev/FrameGrabberInterfaces.h(393): note: see declaration of 'yarp::dev::IFrameGrabberControls::setSharpness'
98>C:\Users\icub\sb\robotology\YARP\src\devices\RemoteFrameGrabber\RemoteFrameGrabber.h(530): warning C4996: 'yarp::dev::IFrameGrabberControls::getSharpness': Use getFeature(YARP_FEATURE_SHARPNESS, v) instead
98>C:\Users\icub\sb\robotology\YARP\src\libYARP_dev\src\yarp/dev/FrameGrabberInterfaces.h(463): note: see declaration of 'yarp::dev::IFrameGrabberControls::getSharpness'
98>C:\Users\icub\sb\robotology\YARP\src\devices\RemoteFrameGrabber\RemoteFrameGrabber.h(535): warning C4996: 'yarp::dev::IFrameGrabberControls::setWhiteBalance': Use setFeature(YARP_FEATURE_WHITE_BALANCE, blue, red) instead
98>C:\Users\icub\sb\robotology\YARP\src\libYARP_dev\src\yarp/dev/FrameGrabberInterfaces.h(401): note: see declaration of 'yarp::dev::IFrameGrabberControls::setWhiteBalance'
98>C:\Users\icub\sb\robotology\YARP\src\devices\RemoteFrameGrabber\RemoteFrameGrabber.h(539): warning C4996: 'yarp::dev::IFrameGrabberControls::getWhiteBalance': Use getFeature(YARP_FEATURE_WHITE_BALANCE, blue, red) instead
98>C:\Users\icub\sb\robotology\YARP\src\libYARP_dev\src\yarp/dev/FrameGrabberInterfaces.h(471): note: see declaration of 'yarp::dev::IFrameGrabberControls::getWhiteBalance'
98>C:\Users\icub\sb\robotology\YARP\src\devices\RemoteFrameGrabber\RemoteFrameGrabber.h(544): warning C4996: 'yarp::dev::IFrameGrabberControls::setHue': Use setFeature(YARP_FEATURE_HUE, v) instead
98>C:\Users\icub\sb\robotology\YARP\src\libYARP_dev\src\yarp/dev/FrameGrabberInterfaces.h(408): note: see declaration of 'yarp::dev::IFrameGrabberControls::setHue'
98>C:\Users\icub\sb\robotology\YARP\src\devices\RemoteFrameGrabber\RemoteFrameGrabber.h(548): warning C4996: 'yarp::dev::IFrameGrabberControls::getHue': Use getFeature(YARP_FEATURE_HUE, v) instead
98>C:\Users\icub\sb\robotology\YARP\src\libYARP_dev\src\yarp/dev/FrameGrabberInterfaces.h(477): note: see declaration of 'yarp::dev::IFrameGrabberControls::getHue'
98>C:\Users\icub\sb\robotology\YARP\src\devices\RemoteFrameGrabber\RemoteFrameGrabber.h(553): warning C4996: 'yarp::dev::IFrameGrabberControls::setSaturation': Use setFeature(YARP_FEATURE_SATURATION, v) instead
98>C:\Users\icub\sb\robotology\YARP\src\libYARP_dev\src\yarp/dev/FrameGrabberInterfaces.h(415): note: see declaration of 'yarp::dev::IFrameGrabberControls::setSaturation'
98>C:\Users\icub\sb\robotology\YARP\src\devices\RemoteFrameGrabber\RemoteFrameGrabber.h(557): warning C4996: 'yarp::dev::IFrameGrabberControls::getSaturation': Use getFeature(YARP_FEATURE_SATURATION, v) instead
98>C:\Users\icub\sb\robotology\YARP\src\libYARP_dev\src\yarp/dev/FrameGrabberInterfaces.h(483): note: see declaration of 'yarp::dev::IFrameGrabberControls::getSaturation'
98>C:\Users\icub\sb\robotology\YARP\src\devices\RemoteFrameGrabber\RemoteFrameGrabber.h(562): warning C4996: 'yarp::dev::IFrameGrabberControls::setGamma': Use setFeature(YARP_FEATURE_GAMMA, v) instead
98>C:\Users\icub\sb\robotology\YARP\src\libYARP_dev\src\yarp/dev/FrameGrabberInterfaces.h(422): note: see declaration of 'yarp::dev::IFrameGrabberControls::setGamma'
98>C:\Users\icub\sb\robotology\YARP\src\devices\RemoteFrameGrabber\RemoteFrameGrabber.h(566): warning C4996: 'yarp::dev::IFrameGrabberControls::getGamma': Use getFeature(YARP_FEATURE_GAMMA, v) instead
98>C:\Users\icub\sb\robotology\YARP\src\libYARP_dev\src\yarp/dev/FrameGrabberInterfaces.h(489): note: see declaration of 'yarp::dev::IFrameGrabberControls::getGamma'
98>C:\Users\icub\sb\robotology\YARP\src\devices\RemoteFrameGrabber\RemoteFrameGrabber.h(571): warning C4996: 'yarp::dev::IFrameGrabberControls::setShutter': Use setFeature(YARP_FEATURE_SHUTTER, v) instead
98>C:\Users\icub\sb\robotology\YARP\src\libYARP_dev\src\yarp/dev/FrameGrabberInterfaces.h(429): note: see declaration of 'yarp::dev::IFrameGrabberControls::setShutter'
98>C:\Users\icub\sb\robotology\YARP\src\devices\RemoteFrameGrabber\RemoteFrameGrabber.h(575): warning C4996: 'yarp::dev::IFrameGrabberControls::getShutter': Use getFeature(YARP_FEATURE_SHUTTER, v) instead
98>C:\Users\icub\sb\robotology\YARP\src\libYARP_dev\src\yarp/dev/FrameGrabberInterfaces.h(495): note: see declaration of 'yarp::dev::IFrameGrabberControls::getShutter'
98>C:\Users\icub\sb\robotology\YARP\src\devices\RemoteFrameGrabber\RemoteFrameGrabber.h(580): warning C4996: 'yarp::dev::IFrameGrabberControls::setGain': Use setFeature(YARP_FEATURE_GAIN, v) instead
98>C:\Users\icub\sb\robotology\YARP\src\libYARP_dev\src\yarp/dev/FrameGrabberInterfaces.h(436): note: see declaration of 'yarp::dev::IFrameGrabberControls::setGain'
98>C:\Users\icub\sb\robotology\YARP\src\devices\RemoteFrameGrabber\RemoteFrameGrabber.h(584): warning C4996: 'yarp::dev::IFrameGrabberControls::getGain': Use getFeature(YARP_FEATURE_GAIN, v) instead
98>C:\Users\icub\sb\robotology\YARP\src\libYARP_dev\src\yarp/dev/FrameGrabberInterfaces.h(501): note: see declaration of 'yarp::dev::IFrameGrabberControls::getGain'
98>C:\Users\icub\sb\robotology\YARP\src\devices\RemoteFrameGrabber\RemoteFrameGrabber.h(589): warning C4996: 'yarp::dev::IFrameGrabberControls::setIris': Use setFeature(YARP_FEATURE_IRIS, v) instead
98>C:\Users\icub\sb\robotology\YARP\src\libYARP_dev\src\yarp/dev/FrameGrabberInterfaces.h(443): note: see declaration of 'yarp::dev::IFrameGrabberControls::setIris'
98>C:\Users\icub\sb\robotology\YARP\src\devices\RemoteFrameGrabber\RemoteFrameGrabber.h(593): warning C4996: 'yarp::dev::IFrameGrabberControls::getIris': Use getFeature(YARP_FEATURE_IRIS, v) instead
98>C:\Users\icub\sb\robotology\YARP\src\libYARP_dev\src\yarp/dev/FrameGrabberInterfaces.h(507): note: see declaration of 'yarp::dev::IFrameGrabberControls::getIris'
98>C:\Users\icub\sb\robotology\YARP\src\devices\RemoteFrameGrabber\RemoteFrameGrabber.h(404): warning C4267: '=': conversion from 'size_t' to 'int', possible loss of data
98>C:\Users\icub\sb\robotology\YARP\src\devices\RemoteFrameGrabber\RemoteFrameGrabber.h(405): warning C4267: '=': conversion from 'size_t' to 'int', possible loss of data
98>C:\Users\icub\sb\build\robotology\YARP\src\devices\RemoteFrameGrabber\yarp_plugin_yarpmod_remote_grabber.cpp(33): warning C4267: 'return': conversion from 'size_t' to 'int', possible loss of data
98>RemoteFrameGrabber.cpp
97>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Port.h(248): warning C4996: 'yarp::os::Contactable::setCallbackLock': Use setCallbackLock with std::mutex instead
97>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Contactable.h(338): note: see declaration of 'yarp::os::Contactable::setCallbackLock'
97>C:\Users\icub\sb\robotology\YARP\src\libYARP_dev\src\idl_generated_code\yarp/dev/impl/jointData.h(50): warning C4251: 'yarp::dev::impl::jointData::controlMode': class 'yarp::sig::VectorOf<int>' needs to have dll-interface to be used by clients of class 'yarp::dev::impl::jointData'
97>C:\Users\icub\sb\robotology\YARP\src\libYARP_dev\src\idl_generated_code\yarp/dev/impl/jointData.h(50): note: see declaration of 'yarp::sig::VectorOf<int>'
97>C:\Users\icub\sb\robotology\YARP\src\libYARP_dev\src\idl_generated_code\yarp/dev/impl/jointData.h(52): warning C4251: 'yarp::dev::impl::jointData::interactionMode': class 'yarp::sig::VectorOf<int>' needs to have dll-interface to be used by clients of class 'yarp::dev::impl::jointData'
97>C:\Users\icub\sb\robotology\YARP\src\libYARP_dev\src\idl_generated_code\yarp/dev/impl/jointData.h(50): note: see declaration of 'yarp::sig::VectorOf<int>'
97>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/BufferedPort.h(290): warning C4996: 'yarp::os::Contactable::setCallbackLock': Use setCallbackLock with std::mutex instead
97>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Contactable.h(338): note: see declaration of 'yarp::os::Contactable::setCallbackLock'
97>c:\users\icub\sb\robotology\yarp\src\devices\remotecontrolboard\stateExtendedReader.h(44): note: see reference to class template instantiation 'yarp::os::BufferedPort<yarp::dev::impl::jointData>' being compiled
97>Generating Code...
99>Building Custom Rule C:/Users/icub/sb/robotology/YARP/src/devices/RobotDescriptionClient/CMakeLists.txt
99>CMake does not need to re-run because C:/Users/icub/sb/build/robotology/YARP/src/devices/RobotDescriptionClient/CMakeFiles/generate.stamp is up-to-date.
96>Done building project "yarp_pipe.vcxproj".
101>------ Build started: Project: yarp_serial, Configuration: Release x64 ------
99>yarp_plugin_yarpmod_robotDescriptionClient.cpp
95>Done building project "yarp_navigation2DServer.vcxproj".
102>------ Build started: Project: yarp_test_grabber, Configuration: Release x64 ------
98>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Port.h(248): warning C4996: 'yarp::os::Contactable::setCallbackLock': Use setCallbackLock with std::mutex instead
98>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Contactable.h(338): note: see declaration of 'yarp::os::Contactable::setCallbackLock'
100>Building Custom Rule C:/Users/icub/sb/robotology/YARP/src/devices/RobotDescriptionServer/CMakeLists.txt
98>c:\users\icub\sb\robotology\yarp\src\devices\remoteframegrabber\RemoteFrameGrabber.h(509): warning C4996: 'yarp::dev::IFrameGrabberControls::setBrightness': Use setFeature(YARP_FEATURE_BRIGHTNESS, v) instead
100>CMake does not need to re-run because C:/Users/icub/sb/build/robotology/YARP/src/devices/RobotDescriptionServer/CMakeFiles/generate.stamp is up-to-date.
100>yarp_plugin_yarpmod_robotDescriptionServer.cpp
98>C:\Users\icub\sb\robotology\YARP\src\libYARP_dev\src\yarp/dev/FrameGrabberInterfaces.h(379): note: see declaration of 'yarp::dev::IFrameGrabberControls::setBrightness'
98>c:\users\icub\sb\robotology\yarp\src\devices\remoteframegrabber\RemoteFrameGrabber.h(513): warning C4996: 'yarp::dev::IFrameGrabberControls::getBrightness': Use getFeature(YARP_FEATURE_BRIGHTNESS, v) instead
98>C:\Users\icub\sb\robotology\YARP\src\libYARP_dev\src\yarp/dev/FrameGrabberInterfaces.h(451): note: see declaration of 'yarp::dev::IFrameGrabberControls::getBrightness'
98>c:\users\icub\sb\robotology\yarp\src\devices\remoteframegrabber\RemoteFrameGrabber.h(517): warning C4996: 'yarp::dev::IFrameGrabberControls::setExposure': Use setFeature(YARP_FEATURE_EXPOSURE, v) instead
98>C:\Users\icub\sb\robotology\YARP\src\libYARP_dev\src\yarp/dev/FrameGrabberInterfaces.h(386): note: see declaration of 'yarp::dev::IFrameGrabberControls::setExposure'
98>c:\users\icub\sb\robotology\yarp\src\devices\remoteframegrabber\RemoteFrameGrabber.h(521): warning C4996: 'yarp::dev::IFrameGrabberControls::getExposure': Use getFeature(YARP_FEATURE_EXPOSURE, v) instead
98>C:\Users\icub\sb\robotology\YARP\src\libYARP_dev\src\yarp/dev/FrameGrabberInterfaces.h(457): note: see declaration of 'yarp::dev::IFrameGrabberControls::getExposure'
98>c:\users\icub\sb\robotology\yarp\src\devices\remoteframegrabber\RemoteFrameGrabber.h(526): warning C4996: 'yarp::dev::IFrameGrabberControls::setSharpness': Use setFeature(YARP_FEATURE_SHARPNESS, v) instead
98>C:\Users\icub\sb\robotology\YARP\src\libYARP_dev\src\yarp/dev/FrameGrabberInterfaces.h(393): note: see declaration of 'yarp::dev::IFrameGrabberControls::setSharpness'
98>c:\users\icub\sb\robotology\yarp\src\devices\remoteframegrabber\RemoteFrameGrabber.h(530): warning C4996: 'yarp::dev::IFrameGrabberControls::getSharpness': Use getFeature(YARP_FEATURE_SHARPNESS, v) instead
98>C:\Users\icub\sb\robotology\YARP\src\libYARP_dev\src\yarp/dev/FrameGrabberInterfaces.h(463): note: see declaration of 'yarp::dev::IFrameGrabberControls::getSharpness'
98>c:\users\icub\sb\robotology\yarp\src\devices\remoteframegrabber\RemoteFrameGrabber.h(535): warning C4996: 'yarp::dev::IFrameGrabberControls::setWhiteBalance': Use setFeature(YARP_FEATURE_WHITE_BALANCE, blue, red) instead
98>C:\Users\icub\sb\robotology\YARP\src\libYARP_dev\src\yarp/dev/FrameGrabberInterfaces.h(401): note: see declaration of 'yarp::dev::IFrameGrabberControls::setWhiteBalance'
98>c:\users\icub\sb\robotology\yarp\src\devices\remoteframegrabber\RemoteFrameGrabber.h(539): warning C4996: 'yarp::dev::IFrameGrabberControls::getWhiteBalance': Use getFeature(YARP_FEATURE_WHITE_BALANCE, blue, red) instead
98>C:\Users\icub\sb\robotology\YARP\src\libYARP_dev\src\yarp/dev/FrameGrabberInterfaces.h(471): note: see declaration of 'yarp::dev::IFrameGrabberControls::getWhiteBalance'
98>c:\users\icub\sb\robotology\yarp\src\devices\remoteframegrabber\RemoteFrameGrabber.h(544): warning C4996: 'yarp::dev::IFrameGrabberControls::setHue': Use setFeature(YARP_FEATURE_HUE, v) instead
98>C:\Users\icub\sb\robotology\YARP\src\libYARP_dev\src\yarp/dev/FrameGrabberInterfaces.h(408): note: see declaration of 'yarp::dev::IFrameGrabberControls::setHue'
98>c:\users\icub\sb\robotology\yarp\src\devices\remoteframegrabber\RemoteFrameGrabber.h(548): warning C4996: 'yarp::dev::IFrameGrabberControls::getHue': Use getFeature(YARP_FEATURE_HUE, v) instead
98>C:\Users\icub\sb\robotology\YARP\src\libYARP_dev\src\yarp/dev/FrameGrabberInterfaces.h(477): note: see declaration of 'yarp::dev::IFrameGrabberControls::getHue'
98>c:\users\icub\sb\robotology\yarp\src\devices\remoteframegrabber\RemoteFrameGrabber.h(553): warning C4996: 'yarp::dev::IFrameGrabberControls::setSaturation': Use setFeature(YARP_FEATURE_SATURATION, v) instead
98>C:\Users\icub\sb\robotology\YARP\src\libYARP_dev\src\yarp/dev/FrameGrabberInterfaces.h(415): note: see declaration of 'yarp::dev::IFrameGrabberControls::setSaturation'
98>c:\users\icub\sb\robotology\yarp\src\devices\remoteframegrabber\RemoteFrameGrabber.h(557): warning C4996: 'yarp::dev::IFrameGrabberControls::getSaturation': Use getFeature(YARP_FEATURE_SATURATION, v) instead
98>C:\Users\icub\sb\robotology\YARP\src\libYARP_dev\src\yarp/dev/FrameGrabberInterfaces.h(483): note: see declaration of 'yarp::dev::IFrameGrabberControls::getSaturation'
98>c:\users\icub\sb\robotology\yarp\src\devices\remoteframegrabber\RemoteFrameGrabber.h(562): warning C4996: 'yarp::dev::IFrameGrabberControls::setGamma': Use setFeature(YARP_FEATURE_GAMMA, v) instead
98>C:\Users\icub\sb\robotology\YARP\src\libYARP_dev\src\yarp/dev/FrameGrabberInterfaces.h(422): note: see declaration of 'yarp::dev::IFrameGrabberControls::setGamma'
98>c:\users\icub\sb\robotology\yarp\src\devices\remoteframegrabber\RemoteFrameGrabber.h(566): warning C4996: 'yarp::dev::IFrameGrabberControls::getGamma': Use getFeature(YARP_FEATURE_GAMMA, v) instead
98>C:\Users\icub\sb\robotology\YARP\src\libYARP_dev\src\yarp/dev/FrameGrabberInterfaces.h(489): note: see declaration of 'yarp::dev::IFrameGrabberControls::getGamma'
98>c:\users\icub\sb\robotology\yarp\src\devices\remoteframegrabber\RemoteFrameGrabber.h(571): warning C4996: 'yarp::dev::IFrameGrabberControls::setShutter': Use setFeature(YARP_FEATURE_SHUTTER, v) instead
98>C:\Users\icub\sb\robotology\YARP\src\libYARP_dev\src\yarp/dev/FrameGrabberInterfaces.h(429): note: see declaration of 'yarp::dev::IFrameGrabberControls::setShutter'
98>c:\users\icub\sb\robotology\yarp\src\devices\remoteframegrabber\RemoteFrameGrabber.h(575): warning C4996: 'yarp::dev::IFrameGrabberControls::getShutter': Use getFeature(YARP_FEATURE_SHUTTER, v) instead
98>C:\Users\icub\sb\robotology\YARP\src\libYARP_dev\src\yarp/dev/FrameGrabberInterfaces.h(495): note: see declaration of 'yarp::dev::IFrameGrabberControls::getShutter'
98>c:\users\icub\sb\robotology\yarp\src\devices\remoteframegrabber\RemoteFrameGrabber.h(580): warning C4996: 'yarp::dev::IFrameGrabberControls::setGain': Use setFeature(YARP_FEATURE_GAIN, v) instead
98>C:\Users\icub\sb\robotology\YARP\src\libYARP_dev\src\yarp/dev/FrameGrabberInterfaces.h(436): note: see declaration of 'yarp::dev::IFrameGrabberControls::setGain'
98>c:\users\icub\sb\robotology\yarp\src\devices\remoteframegrabber\RemoteFrameGrabber.h(584): warning C4996: 'yarp::dev::IFrameGrabberControls::getGain': Use getFeature(YARP_FEATURE_GAIN, v) instead
98>C:\Users\icub\sb\robotology\YARP\src\libYARP_dev\src\yarp/dev/FrameGrabberInterfaces.h(501): note: see declaration of 'yarp::dev::IFrameGrabberControls::getGain'
98>c:\users\icub\sb\robotology\yarp\src\devices\remoteframegrabber\RemoteFrameGrabber.h(589): warning C4996: 'yarp::dev::IFrameGrabberControls::setIris': Use setFeature(YARP_FEATURE_IRIS, v) instead
98>C:\Users\icub\sb\robotology\YARP\src\libYARP_dev\src\yarp/dev/FrameGrabberInterfaces.h(443): note: see declaration of 'yarp::dev::IFrameGrabberControls::setIris'
98>c:\users\icub\sb\robotology\yarp\src\devices\remoteframegrabber\RemoteFrameGrabber.h(593): warning C4996: 'yarp::dev::IFrameGrabberControls::getIris': Use getFeature(YARP_FEATURE_IRIS, v) instead
98>C:\Users\icub\sb\robotology\YARP\src\libYARP_dev\src\yarp/dev/FrameGrabberInterfaces.h(507): note: see declaration of 'yarp::dev::IFrameGrabberControls::getIris'
98>c:\users\icub\sb\robotology\yarp\src\devices\remoteframegrabber\RemoteFrameGrabber.h(404): warning C4267: '=': conversion from 'size_t' to 'int', possible loss of data
98>c:\users\icub\sb\robotology\yarp\src\devices\remoteframegrabber\RemoteFrameGrabber.h(405): warning C4267: '=': conversion from 'size_t' to 'int', possible loss of data
98>Generating Code...
101>Building Custom Rule C:/Users/icub/sb/robotology/YARP/src/devices/ServerSerial/CMakeLists.txt
101>CMake does not need to re-run because C:/Users/icub/sb/build/robotology/YARP/src/devices/ServerSerial/CMakeFiles/generate.stamp is up-to-date.
102>Building Custom Rule C:/Users/icub/sb/robotology/YARP/src/devices/test_grabber/CMakeLists.txt
102>CMake does not need to re-run because C:/Users/icub/sb/build/robotology/YARP/src/devices/test_grabber/CMakeFiles/generate.stamp is up-to-date.
102>yarp_plugin_yarpmod_test_grabber.cpp
99>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Port.h(248): warning C4996: 'yarp::os::Contactable::setCallbackLock': Use setCallbackLock with std::mutex instead
99>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Contactable.h(338): note: see declaration of 'yarp::os::Contactable::setCallbackLock'
93>Done building project "yarp_multipleanalogsensorsserver.vcxproj".
103>------ Build started: Project: yarp_test_motor, Configuration: Release x64 ------
99>C:\Users\icub\sb\build\robotology\YARP\src\devices\RobotDescriptionClient\yarp_plugin_yarpmod_robotDescriptionClient.cpp(33): warning C4267: 'return': conversion from 'size_t' to 'int', possible loss of data
99>RobotDescriptionClient.cpp
97> Creating library C:/Users/icub/sb/build/robotology/YARP/lib/Release/yarp_remote_controlboard.lib and object C:/Users/icub/sb/build/robotology/YARP/lib/Release/yarp_remote_controlboard.exp
97>yarp_remote_controlboard.vcxproj -> C:\Users\icub\sb\build\robotology\YARP\lib\yarp\Release\yarp_remote_controlboard.dll
101>yarp_plugin_yarpmod_serial.cpp
98> Creating library C:/Users/icub/sb/build/robotology/YARP/lib/Release/yarp_remote_grabber.lib and object C:/Users/icub/sb/build/robotology/YARP/lib/Release/yarp_remote_grabber.exp
92>Done building project "yarp_multipleanalogsensorsremapper.vcxproj".
100>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Port.h(248): warning C4996: 'yarp::os::Contactable::setCallbackLock': Use setCallbackLock with std::mutex instead
104>------ Build started: Project: yarp_transformClient, Configuration: Release x64 ------
102>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Port.h(248): warning C4996: 'yarp::os::Contactable::setCallbackLock': Use setCallbackLock with std::mutex instead
102>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Contactable.h(338): note: see declaration of 'yarp::os::Contactable::setCallbackLock'
100>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Contactable.h(338): note: see declaration of 'yarp::os::Contactable::setCallbackLock'
103>Building Custom Rule C:/Users/icub/sb/robotology/YARP/src/devices/TestMotor/CMakeLists.txt
98>yarp_remote_grabber.vcxproj -> C:\Users\icub\sb\build\robotology\YARP\lib\yarp\Release\yarp_remote_grabber.dll
100>C:\Users\icub\sb\build\robotology\YARP\src\devices\RobotDescriptionServer\yarp_plugin_yarpmod_robotDescriptionServer.cpp(33): warning C4267: 'return': conversion from 'size_t' to 'int', possible loss of data
100>RobotDescriptionServer.cpp
103>CMake does not need to re-run because C:/Users/icub/sb/build/robotology/YARP/src/devices/TestMotor/CMakeFiles/generate.stamp is up-to-date.
103>yarp_plugin_yarpmod_test_motor.cpp
102>C:\Users\icub\sb\build\robotology\YARP\src\devices\test_grabber\yarp_plugin_yarpmod_test_grabber.cpp(33): warning C4267: 'return': conversion from 'size_t' to 'int', possible loss of data
102>TestFrameGrabber.cpp
99>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Port.h(248): warning C4996: 'yarp::os::Contactable::setCallbackLock': Use setCallbackLock with std::mutex instead
99>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Contactable.h(338): note: see declaration of 'yarp::os::Contactable::setCallbackLock'
99>Generating Code...
101>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Port.h(248): warning C4996: 'yarp::os::Contactable::setCallbackLock': Use setCallbackLock with std::mutex instead
101>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Contactable.h(338): note: see declaration of 'yarp::os::Contactable::setCallbackLock'
101>C:\Users\icub\sb\build\robotology\YARP\src\devices\ServerSerial\yarp_plugin_yarpmod_serial.cpp(33): warning C4267: 'return': conversion from 'size_t' to 'int', possible loss of data
104>Building Custom Rule C:/Users/icub/sb/robotology/YARP/src/devices/transformClient/CMakeLists.txt
104>CMake does not need to re-run because C:/Users/icub/sb/build/robotology/YARP/src/devices/transformClient/CMakeFiles/generate.stamp is up-to-date.
104>yarp_plugin_yarpmod_transformClient.cpp
101>ServerSerial.cpp
102>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Port.h(248): warning C4996: 'yarp::os::Contactable::setCallbackLock': Use setCallbackLock with std::mutex instead
102>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Contactable.h(338): note: see declaration of 'yarp::os::Contactable::setCallbackLock'
102>C:\Users\icub\sb\robotology\YARP\src\devices\test_grabber\TestFrameGrabber.cpp(168): warning C4267: 'return': conversion from 'size_t' to 'int', possible loss of data
102>C:\Users\icub\sb\robotology\YARP\src\devices\test_grabber\TestFrameGrabber.cpp(172): warning C4267: 'return': conversion from 'size_t' to 'int', possible loss of data
102>C:\Users\icub\sb\robotology\YARP\src\devices\test_grabber\TestFrameGrabber.cpp(176): warning C4267: 'return': conversion from 'size_t' to 'int', possible loss of data
102>C:\Users\icub\sb\robotology\YARP\src\devices\test_grabber\TestFrameGrabber.cpp(180): warning C4267: 'return': conversion from 'size_t' to 'int', possible loss of data
102>C:\Users\icub\sb\robotology\YARP\src\devices\test_grabber\TestFrameGrabber.cpp(189): warning C4267: '=': conversion from 'size_t' to 'int', possible loss of data
102>C:\Users\icub\sb\robotology\YARP\src\devices\test_grabber\TestFrameGrabber.cpp(190): warning C4267: '=': conversion from 'size_t' to 'int', possible loss of data
102>C:\Users\icub\sb\robotology\YARP\src\devices\test_grabber\TestFrameGrabber.cpp(344): warning C4267: 'initializing': conversion from 'size_t' to 'int', possible loss of data
102>C:\Users\icub\sb\robotology\YARP\src\devices\test_grabber\TestFrameGrabber.cpp(347): warning C4267: 'argument': conversion from 'size_t' to 'int', possible loss of data
102>C:\Users\icub\sb\robotology\YARP\src\devices\test_grabber\TestFrameGrabber.cpp(353): warning C4267: 'argument': conversion from 'size_t' to 'int', possible loss of data
102>C:\Users\icub\sb\robotology\YARP\src\devices\test_grabber\TestFrameGrabber.cpp(354): warning C4267: 'argument': conversion from 'size_t' to 'int', possible loss of data
102>C:\Users\icub\sb\robotology\YARP\src\devices\test_grabber\TestFrameGrabber.cpp(363): warning C4267: 'initializing': conversion from 'size_t' to 'int', possible loss of data
102>C:\Users\icub\sb\robotology\YARP\src\devices\test_grabber\TestFrameGrabber.cpp(364): warning C4267: 'initializing': conversion from 'size_t' to 'int', possible loss of data
102>C:\Users\icub\sb\robotology\YARP\src\devices\test_grabber\TestFrameGrabber.cpp(481): warning C4244: '+=': conversion from 'double' to 'unsigned char', possible loss of data
102>C:\Users\icub\sb\robotology\YARP\src\devices\test_grabber\TestFrameGrabber.cpp(482): warning C4244: '+=': conversion from 'double' to 'unsigned char', possible loss of data
102>C:\Users\icub\sb\robotology\YARP\src\devices\test_grabber\TestFrameGrabber.cpp(483): warning C4244: '+=': conversion from 'double' to 'unsigned char', possible loss of data
102>Generating Code...
100>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Port.h(248): warning C4996: 'yarp::os::Contactable::setCallbackLock': Use setCallbackLock with std::mutex instead
100>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Contactable.h(338): note: see declaration of 'yarp::os::Contactable::setCallbackLock'
103>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Port.h(248): warning C4996: 'yarp::os::Contactable::setCallbackLock': Use setCallbackLock with std::mutex instead
103>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Contactable.h(338): note: see declaration of 'yarp::os::Contactable::setCallbackLock'
103>C:\Users\icub\sb\build\robotology\YARP\src\devices\TestMotor\yarp_plugin_yarpmod_test_motor.cpp(33): warning C4267: 'return': conversion from 'size_t' to 'int', possible loss of data
103>TestMotor.cpp
104>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Port.h(248): warning C4996: 'yarp::os::Contactable::setCallbackLock': Use setCallbackLock with std::mutex instead
104>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Contactable.h(338): note: see declaration of 'yarp::os::Contactable::setCallbackLock'
101>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Port.h(248): warning C4996: 'yarp::os::Contactable::setCallbackLock': Use setCallbackLock with std::mutex instead
101>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Contactable.h(338): note: see declaration of 'yarp::os::Contactable::setCallbackLock'
101>Generating Code...
104>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/BufferedPort.h(290): warning C4996: 'yarp::os::Contactable::setCallbackLock': Use setCallbackLock with std::mutex instead
104>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Contactable.h(338): note: see declaration of 'yarp::os::Contactable::setCallbackLock'
104>C:\Users\icub\sb\robotology\YARP\src\devices\transformClient\FrameTransformClient.h(46): note: see reference to class template instantiation 'yarp::os::BufferedPort<yarp::os::Bottle>' being compiled
104>C:\Users\icub\sb\build\robotology\YARP\src\devices\transformClient\yarp_plugin_yarpmod_transformClient.cpp(33): warning C4267: 'return': conversion from 'size_t' to 'int', possible loss of data
104>FrameTransformClient.cpp
100>Generating Code...
99> Creating library C:/Users/icub/sb/build/robotology/YARP/lib/Release/yarp_robotDescriptionClient.lib and object C:/Users/icub/sb/build/robotology/YARP/lib/Release/yarp_robotDescriptionClient.exp
99>yarp_robotDescriptionClient.vcxproj -> C:\Users\icub\sb\build\robotology\YARP\lib\yarp\Release\yarp_robotDescriptionClient.dll
102> Creating library C:/Users/icub/sb/build/robotology/YARP/lib/Release/yarp_test_grabber.lib and object C:/Users/icub/sb/build/robotology/YARP/lib/Release/yarp_test_grabber.exp
98>Done building project "yarp_remote_grabber.vcxproj".
105>------ Build started: Project: yarp_transformServer, Configuration: Release x64 ------
100> Creating library C:/Users/icub/sb/build/robotology/YARP/lib/Release/yarp_robotDescriptionServer.lib and object C:/Users/icub/sb/build/robotology/YARP/lib/Release/yarp_robotDescriptionServer.exp
103>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Port.h(248): warning C4996: 'yarp::os::Contactable::setCallbackLock': Use setCallbackLock with std::mutex instead
97>Done building project "yarp_remote_controlboard.vcxproj".
106>------ Build started: Project: yarp_virtualAnalogServer, Configuration: Release x64 ------
103>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Contactable.h(338): note: see declaration of 'yarp::os::Contactable::setCallbackLock'
103>Generating Code...
101> Creating library C:/Users/icub/sb/build/robotology/YARP/lib/Release/yarp_serial.lib and object C:/Users/icub/sb/build/robotology/YARP/lib/Release/yarp_serial.exp
101>yarp_serial.vcxproj -> C:\Users\icub\sb\build\robotology\YARP\lib\yarp\Release\yarp_serial.dll
102>yarp_test_grabber.vcxproj -> C:\Users\icub\sb\build\robotology\YARP\lib\yarp\Release\yarp_test_grabber.dll
100>yarp_robotDescriptionServer.vcxproj -> C:\Users\icub\sb\build\robotology\YARP\lib\yarp\Release\yarp_robotDescriptionServer.dll
104>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Port.h(248): warning C4996: 'yarp::os::Contactable::setCallbackLock': Use setCallbackLock with std::mutex instead
104>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Contactable.h(338): note: see declaration of 'yarp::os::Contactable::setCallbackLock'
104>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/BufferedPort.h(290): warning C4996: 'yarp::os::Contactable::setCallbackLock': Use setCallbackLock with std::mutex instead
104>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Contactable.h(338): note: see declaration of 'yarp::os::Contactable::setCallbackLock'
104>c:\users\icub\sb\robotology\yarp\src\devices\transformclient\FrameTransformClient.h(46): note: see reference to class template instantiation 'yarp::os::BufferedPort<yarp::os::Bottle>' being compiled
104>C:\Users\icub\sb\robotology\YARP\src\devices\transformClient\FrameTransformClient.cpp(84): warning C4267: 'initializing': conversion from 'size_t' to 'int', possible loss of data
105>Building Custom Rule C:/Users/icub/sb/robotology/YARP/src/devices/transformServer/CMakeLists.txt
105>CMake does not need to re-run because C:/Users/icub/sb/build/robotology/YARP/src/devices/transformServer/CMakeFiles/generate.stamp is up-to-date.
105>yarp_plugin_yarpmod_transformServer.cpp
104>Generating Code...
103> Creating library C:/Users/icub/sb/build/robotology/YARP/lib/Release/yarp_test_motor.lib and object C:/Users/icub/sb/build/robotology/YARP/lib/Release/yarp_test_motor.exp
105>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Port.h(248): warning C4996: 'yarp::os::Contactable::setCallbackLock': Use setCallbackLock with std::mutex instead
105>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Contactable.h(338): note: see declaration of 'yarp::os::Contactable::setCallbackLock'
105>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/AbstractContactable.h(148): warning C4996: 'yarp::os::Contactable::setCallbackLock': Use setCallbackLock with std::mutex instead
105>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Contactable.h(338): note: see declaration of 'yarp::os::Contactable::setCallbackLock'
105>C:\Users\icub\sb\robotology\YARP\src\devices\transformServer\FrameTransformServer.h(51): fatal error C1083: Cannot open include file: 'yarp/rosmsg/geometry_msgs/TransformStamped.h': No such file or directory
105>FrameTransformServer.cpp
106>Building Custom Rule C:/Users/icub/sb/robotology/YARP/src/devices/VirtualAnalogWrapper/CMakeLists.txt
106>CMake does not need to re-run because C:/Users/icub/sb/build/robotology/YARP/src/devices/VirtualAnalogWrapper/CMakeFiles/generate.stamp is up-to-date.
103>yarp_test_motor.vcxproj -> C:\Users\icub\sb\build\robotology\YARP\lib\yarp\Release\yarp_test_motor.dll
105>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Port.h(248): warning C4996: 'yarp::os::Contactable::setCallbackLock': Use setCallbackLock with std::mutex instead
105>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Contactable.h(338): note: see declaration of 'yarp::os::Contactable::setCallbackLock'
105>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/AbstractContactable.h(148): warning C4996: 'yarp::os::Contactable::setCallbackLock': Use setCallbackLock with std::mutex instead
105>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Contactable.h(338): note: see declaration of 'yarp::os::Contactable::setCallbackLock'
104> Creating library C:/Users/icub/sb/build/robotology/YARP/lib/Release/yarp_transformClient.lib and object C:/Users/icub/sb/build/robotology/YARP/lib/Release/yarp_transformClient.exp
105>c:\users\icub\sb\robotology\yarp\src\devices\transformserver\FrameTransformServer.h(51): fatal error C1083: Cannot open include file: 'yarp/rosmsg/geometry_msgs/TransformStamped.h': No such file or directory
105>Generating Code...
105>Done building project "yarp_transformServer.vcxproj" -- FAILED.
99>Done building project "yarp_robotDescriptionClient.vcxproj".
106>yarp_plugin_yarpmod_virtualAnalogServer.cpp
104>yarp_transformClient.vcxproj -> C:\Users\icub\sb\build\robotology\YARP\lib\yarp\Release\yarp_transformClient.dll
107>------ Build started: Project: yarpbatterygui, Configuration: Release x64 ------
107>Automatic MOC for target yarpbatterygui
102>Done building project "yarp_test_grabber.vcxproj".
106>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Port.h(248): warning C4996: 'yarp::os::Contactable::setCallbackLock': Use setCallbackLock with std::mutex instead
106>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Contactable.h(338): note: see declaration of 'yarp::os::Contactable::setCallbackLock'
100>Done building project "yarp_robotDescriptionServer.vcxproj".
101>Done building project "yarp_serial.vcxproj".
106>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/BufferedPort.h(290): warning C4996: 'yarp::os::Contactable::setCallbackLock': Use setCallbackLock with std::mutex instead
106>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Contactable.h(338): note: see declaration of 'yarp::os::Contactable::setCallbackLock'
106>C:\Users\icub\sb\robotology\YARP\src\devices\VirtualAnalogWrapper\VirtualAnalogWrapper.h(109): note: see reference to class template instantiation 'yarp::os::BufferedPort<yarp::os::Bottle>' being compiled
106>C:\Users\icub\sb\build\robotology\YARP\src\devices\VirtualAnalogWrapper\yarp_plugin_yarpmod_virtualAnalogServer.cpp(33): warning C4267: 'return': conversion from 'size_t' to 'int', possible loss of data
106>VirtualAnalogWrapper.cpp
107>Generating qrc_res.cpp
107>Generating ui_display.h
107>C:\Program Files (x86)\Microsoft Visual Studio\2017\Enterprise\Common7\IDE\VC\VCTargets\Microsoft.CppCommon.targets(209,5): error MSB6006: "cmd.exe" exited with code -1073741515.
107>Done building project "yarpbatterygui.vcxproj" -- FAILED.
103>Done building project "yarp_test_motor.vcxproj".
106>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Port.h(248): warning C4996: 'yarp::os::Contactable::setCallbackLock': Use setCallbackLock with std::mutex instead
106>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Contactable.h(338): note: see declaration of 'yarp::os::Contactable::setCallbackLock'
106>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/BufferedPort.h(290): warning C4996: 'yarp::os::Contactable::setCallbackLock': Use setCallbackLock with std::mutex instead
106>C:\Users\icub\sb\robotology\YARP\src\libYARP_os\src\yarp/os/Contactable.h(338): note: see declaration of 'yarp::os::Contactable::setCallbackLock'
106>c:\users\icub\sb\robotology\yarp\src\devices\virtualanalogwrapper\VirtualAnalogWrapper.h(109): note: see reference to class template instantiation 'yarp::os::BufferedPort<yarp::os::Bottle>' being compiled
106>C:\Users\icub\sb\robotology\YARP\src\devices\VirtualAnalogWrapper\VirtualAnalogWrapper.cpp(124): warning C4267: '=': conversion from 'size_t' to 'int', possible loss of data
106>C:\Users\icub\sb\robotology\YARP\src\devices\VirtualAnalogWrapper\VirtualAnalogWrapper.cpp(161): warning C4267: '=': conversion from 'size_t' to '_Ty', possible loss of data
106> with
106> [
106> _Ty=int
106> ]
106>Generating Code...
104>Done building project "yarp_transformClient.vcxproj".
106> Creating library C:/Users/icub/sb/build/robotology/YARP/lib/Release/yarp_virtualAnalogServer.lib and object C:/Users/icub/sb/build/robotology/YARP/lib/Release/yarp_virtualAnalogServer.exp
106>yarp_virtualAnalogServer.vcxproj -> C:\Users\icub\sb\build\robotology\YARP\lib\yarp\Release\yarp_virtualAnalogServer.dll
106>Done building project "yarp_virtualAnalogServer.vcxproj".
108>------ Build started: Project: ALL_BUILD, Configuration: Release x64 ------
108>Building Custom Rule C:/Users/icub/sb/robotology/YARP/CMakeLists.txt
108>CMake does not need to re-run because C:/Users/icub/sb/build/robotology/YARP/CMakeFiles/generate.stamp is up-to-date.
========== Build: 83 succeeded, 25 failed, 0 up-to-date, 0 skipped ==========
 GiulioRomualdi
GiulioRomualdi
All 14 comments
The actual error is error MSB6006: "cmd.exe" exited with code -1073741515- . I guess that the ACE dll is not the PATH.
 traversaro
on 6 Mar 2020
traversaro
on 6 Mar 2020
How did you installed the dependencies?
This by the way is quite a common failure mode on Windows, and if we could drop the linking of ACE from the rosmgs generator it would be great.
traversaro
on 6 Mar 2020
See the following related lines in the robotology-superbuild docs (https://github.com/robotology/robotology-superbuild#system-libraries):
Furthermore, as during the build process some programs that use vcpkg-install dlls are executed, you need to make sure that the vcpkg dll are in the path, by appending to the PATH the C:/robotology/vcpkg/installed/x64-linux/bin and C:/robotology/vcpkg/installed/x64-linux/bin directories.
Obviously, this changes depending on how you installed the ACE dependencies. You can also use the robotology-dependencies installer available at https://github.com/robotology/robotology-superbuild/releases/tag/v2020.02 that installs automatically the pre-compiled version of vcpkg in C:/robotology/idjl and also offers an option to automatically update the PATH variables to avoid this problem, but I still need to document its use.
traversaro
on 6 Mar 2020
I'm using the vcpkg as described in https://github.com/robotology/robotology-superbuild#system-libraries
GiulioRomualdi
on 6 Mar 2020
@traversaro
Furthermore, as during the build process some programs that use vcpkg-install dlls are executed, you need to make sure that the vcpkg dll are in the path, by appending to the PATH the C:/robotology/vcpkg/installed/x64-linux/bin and C:/robotology/vcpkg/installed/x64-linux/bin directories.
That's wrong right? C:/robotology/vcpkg/installed/x64-windows/bin should be the corrected path.
Furthermore C:/robotology/vcpkg/installed/x64-linux/bin is repeated twice. Shouldn't be C:/robotology/vcpkg/installed/x64-windows/bin C:/robotology/vcpkg/installed/x64-windows/lib?
GiulioRomualdi
on 6 Mar 2020
If in the future you want to debug better the MSB6006 error, check how to check the output logs of the command that actually failed: https://stackoverflow.com/questions/13118947/error-msb6006-cmd-exe-exited-with-code-1 .
traversaro
on 6 Mar 2020
@traversaro
Furthermore, as during the build process some programs that use vcpkg-install dlls are executed, you need to make sure that the vcpkg dll are in the path, by appending to the PATH the C:/robotology/vcpkg/installed/x64-linux/bin and C:/robotology/vcpkg/installed/x64-linux/bin directories.
That's wrong right?
C:/robotology/vcpkg/installed/x64-windows/binshould be the corrected path.
FurthermoreC:/robotology/vcpkg/installed/x64-linux/binis repeated twice. Shouldn't beC:/robotology/vcpkg/installed/x64-windows/binC:/robotology/vcpkg/installed/x64-windows/lib?
That is correct, sorry for the typo. That is exactly why I typically ask for feedback on PRs. : )
If you append the correct paths, it works? Could you provide a PR to fix the docs? Thanks!
traversaro
on 6 Mar 2020
I think I have suspect on this issue, also based on the fact that by inspecting the laptop with @GiulioRomualdi it seems that the missing dll was vcruntime140_1.dll (see https://devblogs.microsoft.com/cppblog/making-cpp-exception-handling-smaller-x64/ and https://gitlab.kitware.com/cmake/cmake/issues/19829).
To confirm, what was the Visual Studio 2019 version on your machine?
traversaro
on 6 Mar 2020
Actually no. The visual studio installed in the machine is Visual Studio 2017
GiulioRomualdi
on 9 Mar 2020
Have you generated all the required messages by enabling ALLOW_IDL_GENERATION=ON in yarp ccmake?
 randaz81
on 9 Mar 2020
randaz81
on 9 Mar 2020
Have you generated all the required messages by enabling
ALLOW_IDL_GENERATION=ONin yarp ccmake?
The problem was that the dependency installer just supports Visual Studio 2019, and @GiulioRomualdi was able to get it work by installing the "Microsoft Visual C++ Redistributable for Visual Studio 2015, 2017 and 2019", that installed the missing vcruntime140_1.dll (see https://stackoverflow.com/questions/58828982/vcruntime140-1-dll-missing-after-building-solution-with-c and https://devblogs.microsoft.com/cppblog/making-cpp-exception-handling-smaller-x64/). I updated the docs in https://github.com/robotology/robotology-superbuild/releases/tag/v2020.02 to mention that Visual Studio 2019 is required, so I think we can close the issue now, what do you think @GiulioRomualdi ?
traversaro
on 9 Mar 2020
Yes, we can close it, thank you very much!
GiulioRomualdi
on 9 Mar 2020
to mention that Visual Studio 2019 is required,
Just to understand, so we currently support only VS2019?
 Nicogene
on 10 Mar 2020
Nicogene
on 10 Mar 2020
to mention that Visual Studio 2019 is required,
Just to understand, so we currently support only VS2019?
Officially yes, due to the fact that libraries compiled with VS2015 are compatible with executable compiled with VS2019, but not the reverse (see https://docs.microsoft.com/en-us/cpp/porting/binary-compat-2015-2017?view=vs-2019). As on GitHub actions for now only the v142 toolset (i.e. VS2019) is available, we are forced to just support that. In practice I think that as of this moment Microsoft did not break even "backward" compatibility, so using VS2017 will probably work fine (if you install the redistributable) but there is not guarantee that it will continue to work.
traversaro
on 10 Mar 2020
Related issues
 xEnVrE
·
3Comments
xEnVrE
·
3Comments
 lornat75
·
4Comments
traversaro
·
4Comments
lornat75
·
4Comments
traversaro
·
4Comments
 drdanz
·
3Comments
traversaro
·
3Comments
drdanz
·
3Comments
traversaro
·
3Comments
Most helpful comment
The problem was that the dependency installer just supports Visual Studio 2019, and @GiulioRomualdi was able to get it work by installing the "Microsoft Visual C++ Redistributable for Visual Studio 2015, 2017 and 2019", that installed the missing
vcruntime140_1.dll(see https://stackoverflow.com/questions/58828982/vcruntime140-1-dll-missing-after-building-solution-with-c and https://devblogs.microsoft.com/cppblog/making-cpp-exception-handling-smaller-x64/). I updated the docs in https://github.com/robotology/robotology-superbuild/releases/tag/v2020.02 to mention that Visual Studio 2019 is required, so I think we can close the issue now, what do you think @GiulioRomualdi ?