Yarp: imuBoschBNO055 has wrong conversion formulas for gyro and magnetometer
In the imuBoschBNO055 implementation there are these conversion formulas:
// Fill in accel values
data_tmp[3] = (double)raw_data[0] / 100.0;
data_tmp[4] = (double)raw_data[1] / 100.0;
data_tmp[5] = (double)raw_data[2] / 100.0;
// Fill in Gyro values
data_tmp[6] = (double)raw_data[6] / 100.0;
data_tmp[7] = (double)raw_data[7] / 100.0;
data_tmp[8] = (double)raw_data[8] / 100.0;
// Fill in Magnetometer values
data_tmp[9] = (double)raw_data[3] / 100.0;
data_tmp[10] = (double)raw_data[4] / 100.0;
data_tmp[11] = (double)raw_data[5] / 100.0;
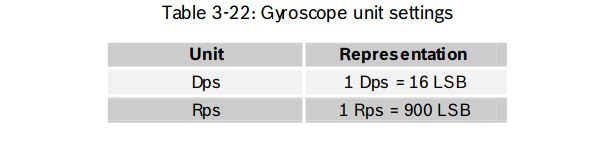
Looking in the Bosch documentation the unit measure are for gyro:
and for magnetometer:
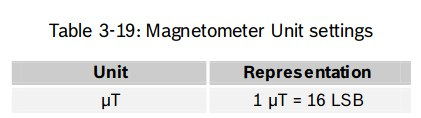
Then it seems that the values have to be divided by 16.0 instead 100.0.
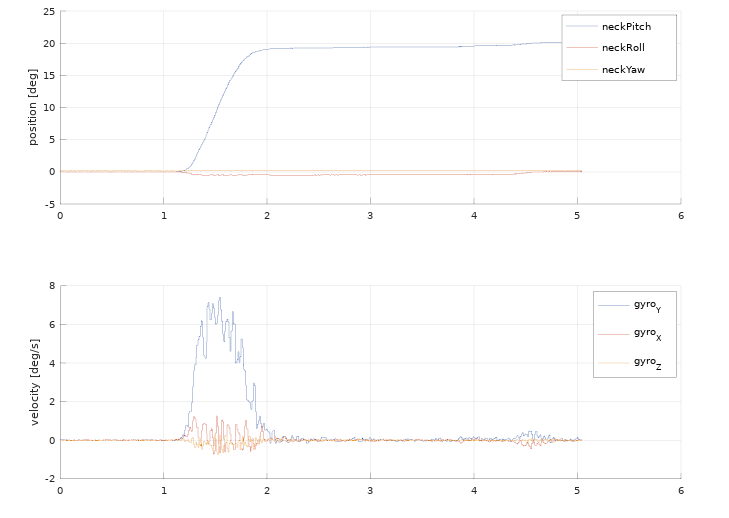
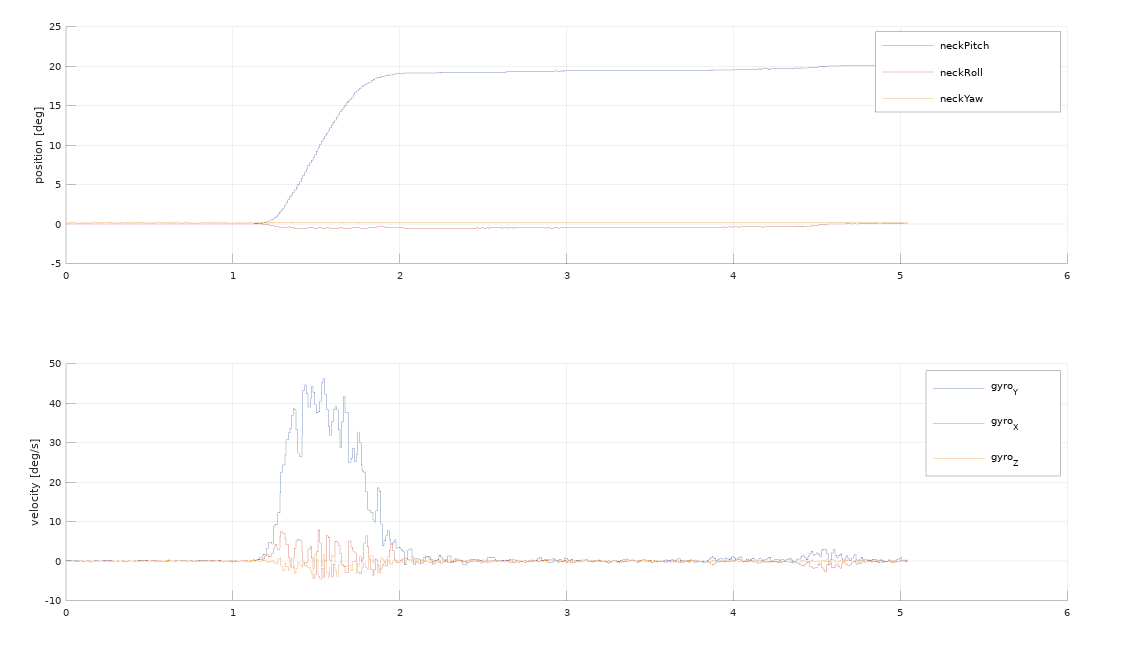
I ran a simple test moving the joint 0 of the head up to 20 deg @ 20 deg/s recording the gyro
BEFORE (using 100 as scaling factor)
AFTER (using 16 as scaling factor)
 Nicogene
Nicogene
All 5 comments
How do you know that the AFTER plot is correct?
Ah, I got it. The average speed of the min jerk movement is 20 deg/s, so the peak needs to be greater of that.
 traversaro
on 5 Jun 2019
traversaro
on 5 Jun 2019
cc @prashanthr05 @nunoguedelha
traversaro
on 5 Jun 2019
This bug affects all the iCub robots containing an imuBosch_BNO055. In particular, the gyro and magnetometer data contained in /icub/inertial have been always not correct, for all YARP/icub-main releases.
The problem does not affect older iCub that use an XSens IMU.
traversaro
on 5 Jun 2019
Another confirmation using the iKinGazeCtrl:
BEFORE
AFTER
Nicogene
on 5 Jun 2019
There are a few issue that could be actually caused by this:
traversaro
on 5 Jun 2019
Related issues
traversaro
·
3Comments
 diegoferigo
·
3Comments
diegoferigo
·
3Comments
 CarlottaSartore
·
3Comments
CarlottaSartore
·
3Comments
 xEnVrE
·
3Comments
xEnVrE
·
3Comments
 jeljaik
·
3Comments
jeljaik
·
3Comments