Px4-autopilot: ekf2 airspeed check bit on a multicopter
This is from a quadcopter that as far as I know doesn't have an airspeed sensor.
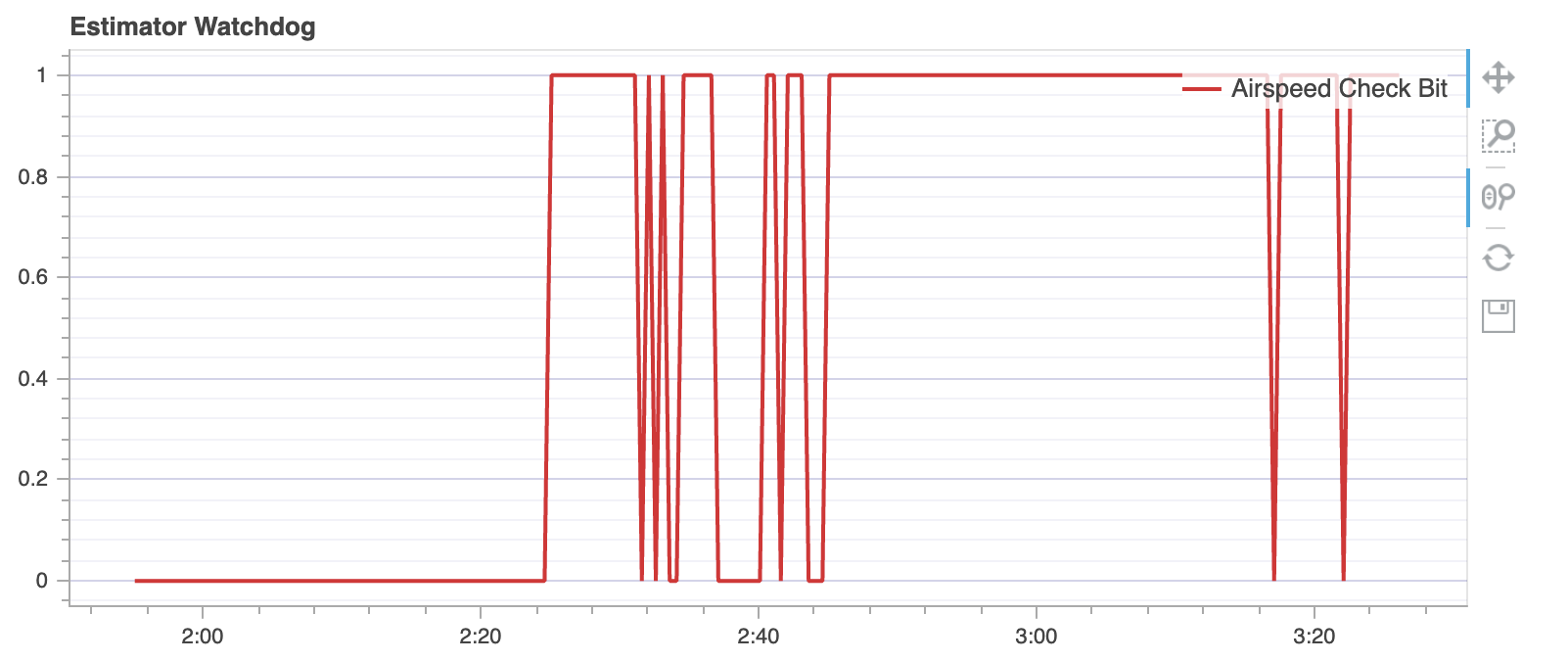
https://logs.px4.io/plot_app?log=0ad8c6f0-a7d5-47a1-be91-0da064561eea
 dagar
dagar
All 5 comments
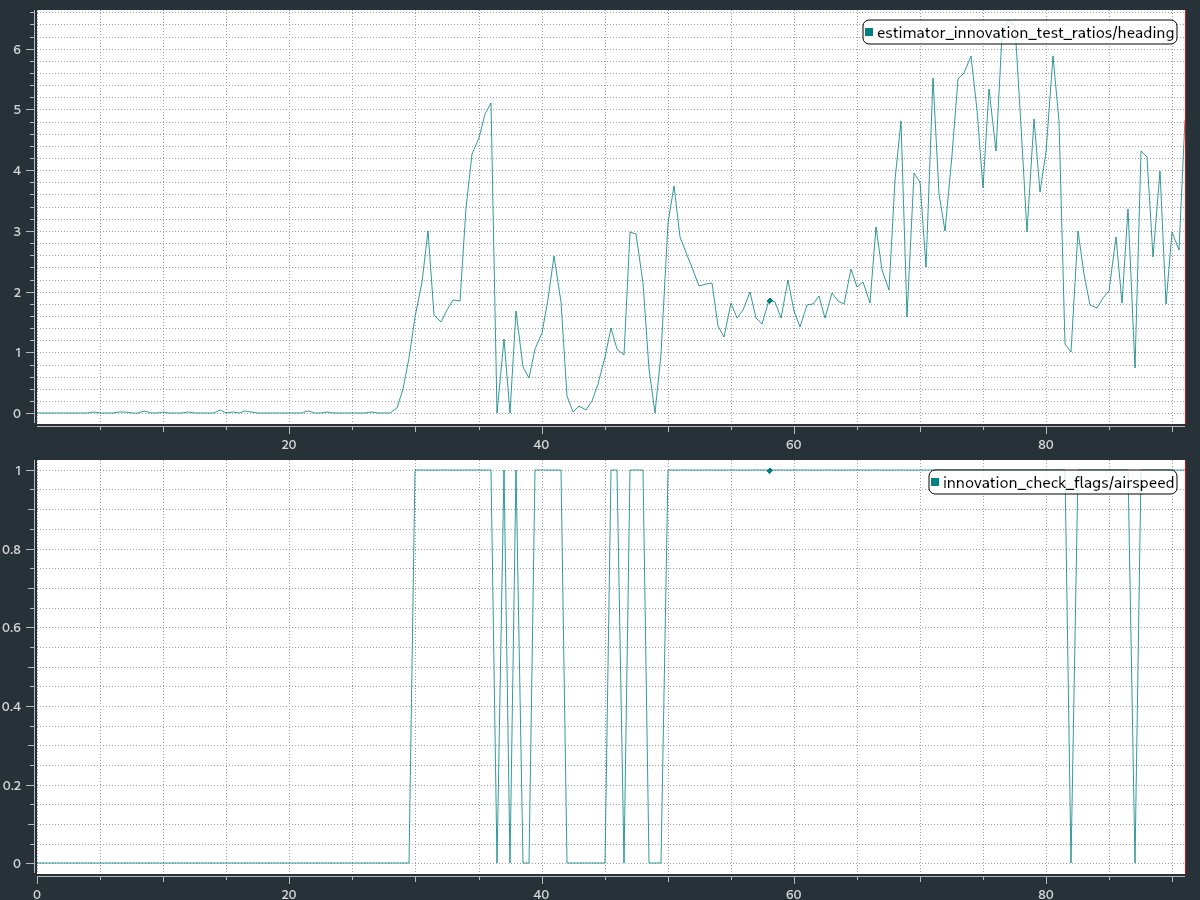
There's a mismatch between the ecl and firmware bitmasks (got broken here: https://github.com/PX4/PX4-ECL/pull/668).
The innovation that fails is the yaw observation
@dagar If we update the bitmask on Firmware, we'll have to fix all the tools parsing it as well and the same thing will happen next time... should we log 13 booleans instead of a bitmask?
 bresch
on 11 Dec 2020
bresch
on 11 Dec 2020
should we log 13 booleans instead of a bitmask?
Yes please! It'll burn a bit of flash storing the string for each field (need for listener and logger), but I think it's worth it.
dagar
on 11 Dec 2020
dagar
on 12 Dec 2020
@dagar where should we track this issue? (which project board?)
 mrpollo
on 15 Dec 2020
mrpollo
on 15 Dec 2020
We can consider this fixed by https://github.com/PX4/PX4-Autopilot/pull/16383.
dagar
on 29 Dec 2020
Related issues
 jonathan84clark
·
29Comments
jonathan84clark
·
29Comments
 Stifael
·
34Comments
Stifael
·
34Comments
 taileron
·
51Comments
taileron
·
51Comments
 LJ0707
·
29Comments
LJ0707
·
29Comments
 LanceFung
·
30Comments
LanceFung
·
30Comments
Most helpful comment
Yes please! It'll burn a bit of flash storing the string for each field (need for listener and logger), but I think it's worth it.