Px4-autopilot: Check magnetic field vector norm
I am experiencing magnetometer glitches described there.
П-shape glitches are followed by the message Mag#0 fail: STALE!, but "spikes" do not.
Problems are likely to be hardware and have nothing to do with PX4 Firmware. However, when these pikes take place, PX4 does not deal with them in any way and feed this obviously wrong data into EKF. This led to multiple UAV crushes.
I would assume running an extra check isn't hard to implement: if the instant change of magfield vector exceeds some threshold, assume this is a fail. This way user can at least get an information that there's something wrong with the magnetometer.
 Roman-
Roman-
All 9 comments
However, when these pikes take place, PX4 does not deal with them in any way and feed this obviously wrong data into EKF.
The EKF has internal checks for sanity of measurements so depending on your tuning it will most likely reject the mag spikes you describe
This led to multiple UAV crushes.
Can share some of the logfiles where the mag spikes have led to crashes?
 CarlOlsson
on 15 Jun 2020
CarlOlsson
on 15 Jun 2020
Can share some of the logfiles where the mag spikes have led to crashes?
https://logs.px4.io/plot_app?log=b6d7df79-7457-449f-87dd-227afc70e44c
Roman-
on 15 Jun 2020
Sorry, I've forgotten to specify:
I'm using Firmware v1.10.
I have disabled the internal mag (mag#1) in config, so after external mag#0 failover there were no valid magnetometers remained. Surely adding extra checks won't fix that, but I would like to see warning messages before taking off.
Roman-
on 15 Jun 2020
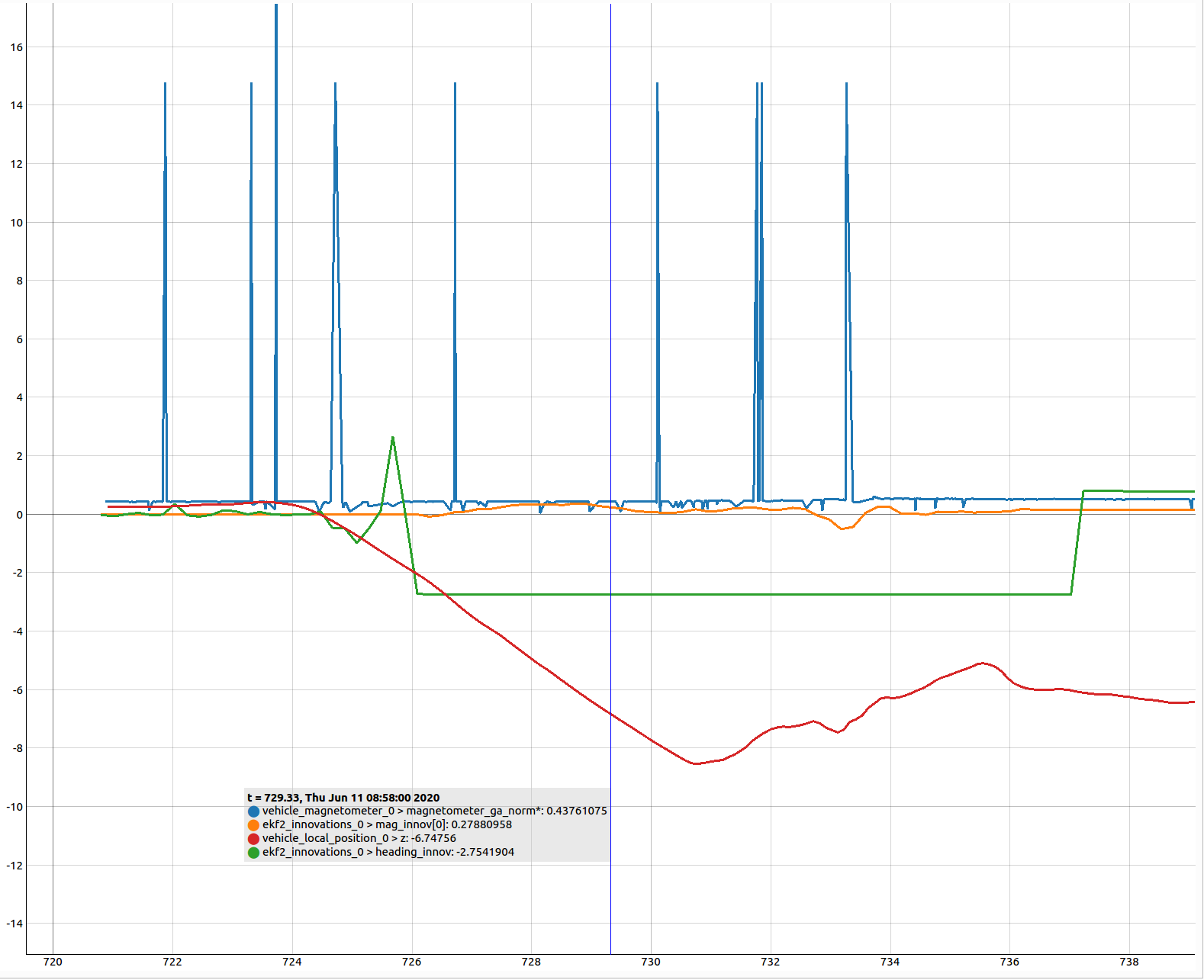
The logging rate is very low so it is a bit hard to say what happened. But from the logfile it isn't obvious to me that the reason of the crash are the mag spikes. These should be rejected by the EKF but you the estimator still diverges right after takeoff.
CarlOlsson
on 15 Jun 2020
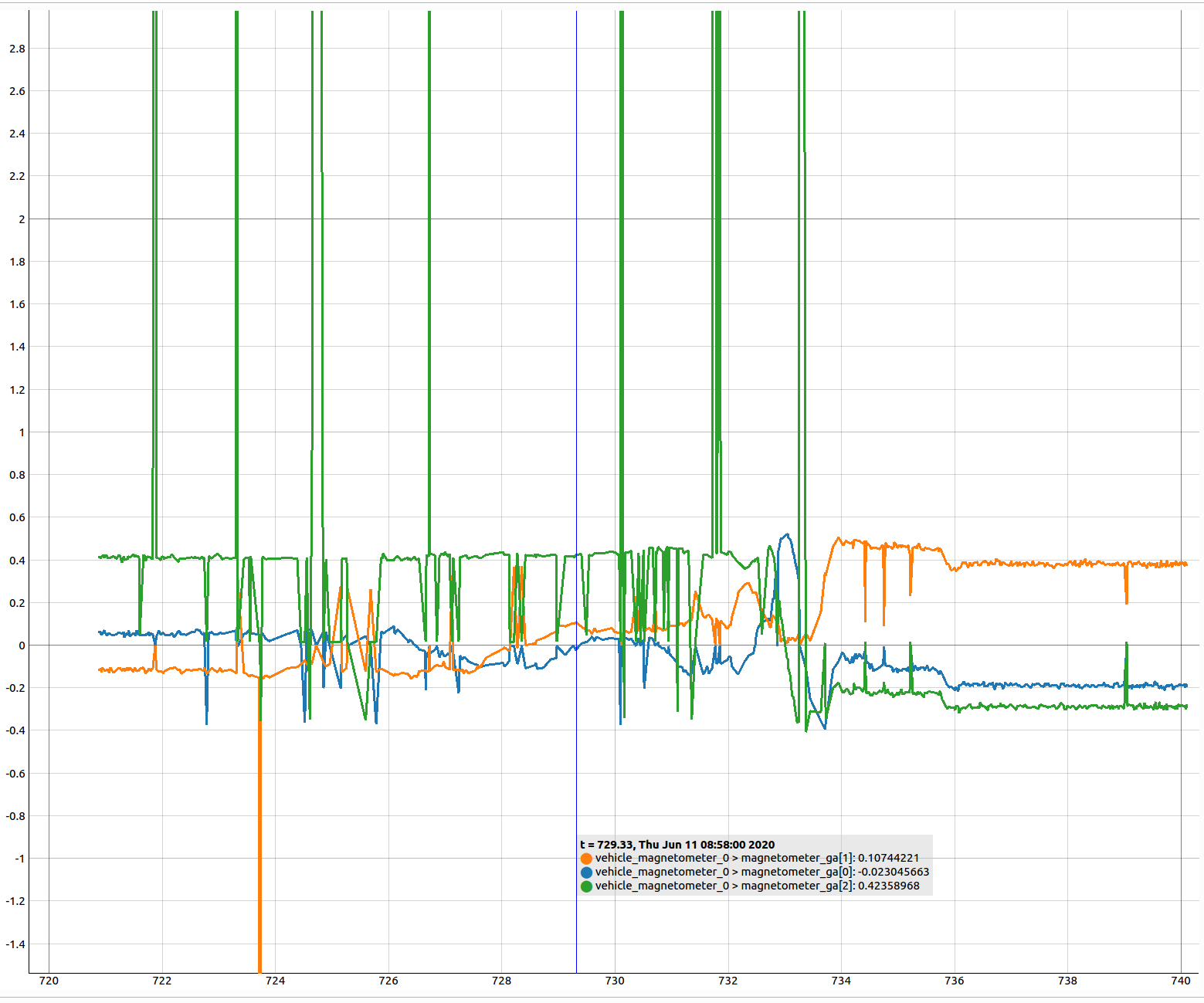
Not only the mag norm is bad for a split second but the mag data is continuously bad for the majority of the logfile
Yeah, some detection for this bad data sounds like a good idea
CarlOlsson
on 15 Jun 2020
@Roman- I added that check in November 2019 but it's unfortunately not in your version of the code.
https://github.com/PX4/ecl/blob/e4b44f704bb641fa93bedc81734c5249fcd9ed42/EKF/mag_control.cpp#L299-L335
from the PR: https://github.com/PX4/ecl/pull/662
 bresch
on 25 Jun 2020
bresch
on 25 Jun 2020
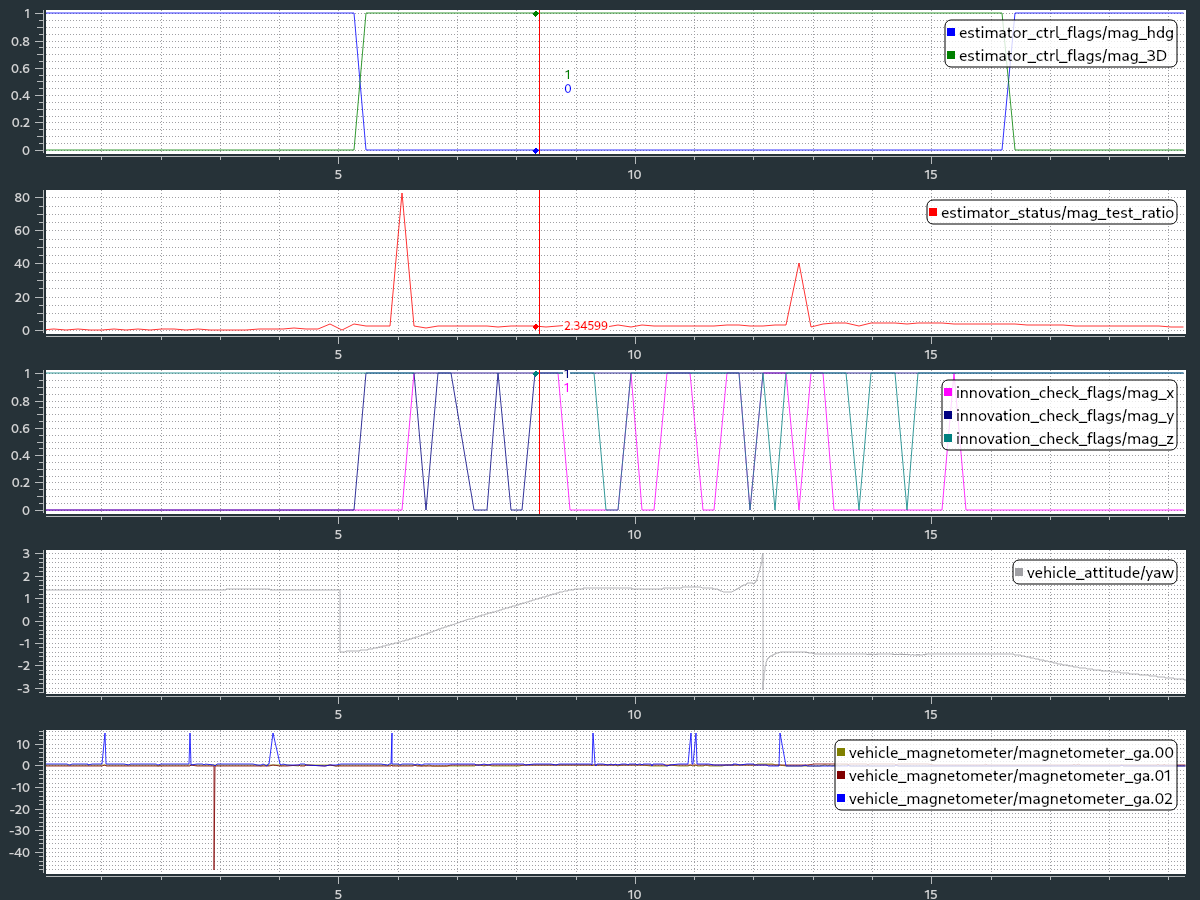
Also note that in your log, the mag fusion is rejected during most of the flight
bresch
on 25 Jun 2020
Thanks!
I am a little confused, the changes you've made in November 2019 weren't included in the release of December 2019 that I use.
Roman-
on 25 Jun 2020
@Roman- Yes, this is because we branched out before for intensive testing. This was the last ECL update for v1.10 https://github.com/PX4/Firmware/commit/5f040fe24c1e488c6b7aadefa37c168bfa96b190
bresch
on 25 Jun 2020
Related issues
 bosskwei
·
3Comments
bosskwei
·
3Comments
 zhanghouxin07
·
5Comments
zhanghouxin07
·
5Comments
 lgh5054
·
4Comments
lgh5054
·
4Comments
 julianoes
·
3Comments
julianoes
·
3Comments
julianoes
·
3Comments
julianoes
·
3Comments