Px4-autopilot: Auto-estimate hover throttle
Setting the correct hover throttle seems to be a consistent issue for users and is a source of a common frustration. We need to implement an estimator that takes current vertical velocity and estimates hover throttle for a given system. Once it is estimated, the parameter should be set so that on next takeoff it is already correct.
This is also relevant for commercial models where people add/remove large cameras and will certainly forget to adjust the vehicle settings.
 LorenzMeier
LorenzMeier
All 10 comments
What about the voltage drop over a flight?
 dagar
on 10 Jul 2019
dagar
on 10 Jul 2019
@cmic0 Can you give links to you dev branch, prototype script and ref papers of your hover throttle estimator please?
 bresch
on 11 Jul 2019
bresch
on 11 Jul 2019
@dagar Voltage drop compensation only works if you have it calibrated (feedforward compensation). Here we want an estimator that basically learns the hover thrust such that the user doesn't even need to specify the hover thrust via a parameter and that self-adjusts during flight.
bresch
on 11 Jul 2019
@dagar Voltage drop compensation only works if you have it calibrated (feedforward compensation). Here we want an estimator that basically learns the hover thrust such that the user doesn't even need to specify the hover thrust via a parameter and that self-adjusts during flight.
I'm talking about the hover thrust changing over the course of a flight as a result of the battery discharge (on typical hobby ESCs). The estimated (and committed) hover thrust by the end of a flight will then be off on the next flight with a fresh battery. Yes it will be adjusted again, but it might not be correct at takeoff. Mainly just curious if that's a consideration. I suppose requiring or encouraging battery compensation in addition is reasonable.
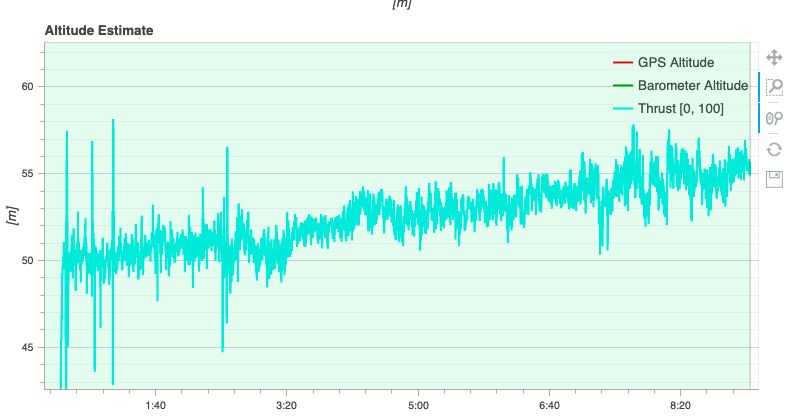
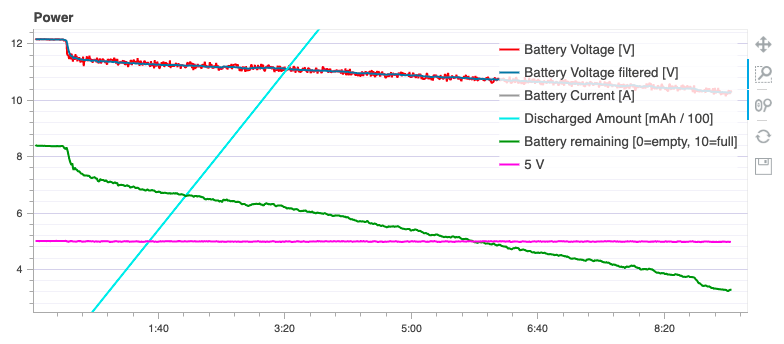
https://logs.px4.io/plot_app?log=b33c30d5-3816-4cfd-9ca4-2296948ca7bb
dagar
on 11 Jul 2019
Changes in density altitude (different days, different weather, different locations) could play a significant roll here as well.
 Antiheavy
on 12 Jul 2019
Antiheavy
on 12 Jul 2019
This is also a consideration for any cargo drone with a payload.
 jkflying
on 16 Jul 2019
jkflying
on 16 Jul 2019
Notes from the devcall (correct me if I get it wrong):
- This should probably not be implemented in the controller but in some estimator, e.g. land_detector.
- This is work in progress and will need quite some testing.
- This hopefully makes it into v1.10.
 julianoes
on 24 Jul 2019
julianoes
on 24 Jul 2019
This issue has been automatically marked as stale because it has not had recent activity. Thank you for your contributions.
![stale[bot] picture](https://avatars3.githubusercontent.com/in/1724?v=4&s=40) stale[bot]
on 22 Oct 2019
stale[bot]
on 22 Oct 2019
I'll start to work again on that in about 1-2 weeks. Current WIP here: https://github.com/Auterion/Flight_Control_Prototyping_Scripts/pull/3
bresch
on 23 Oct 2019
This issue has been automatically marked as stale because it has not had recent activity. Thank you for your contributions.
stale[bot]
on 21 Jan 2020
Related issues
 RomanBapst
·
5Comments
RomanBapst
·
5Comments
 felix-west
·
4Comments
felix-west
·
4Comments
 prothen
·
5Comments
prothen
·
5Comments
 JacobCrabill
·
4Comments
JacobCrabill
·
4Comments
 FaboNo
·
5Comments
FaboNo
·
5Comments
Most helpful comment
This is also a consideration for any cargo drone with a payload.