Px4-autopilot: Uart Issue of PH4-mini with 1.8.0dev firmware
The second uart(UART4_RX_I2C2 and UART4_TX_I2C2 pins) of PH4-mini should be multiplexed. By setting the parameter SYS_COMPANION to corresponding type, we can connect an osd, a SIK telemetry or a secondary GPS on it.
I have flashed the master firmware to PH4-mini via QGC on 27 Sep 2018. When I connecting an osd or a SIK telemetry to the second uart of PH4-mini, I found they don't work. I check SYS_COMPANION in parameter list, I found that it is disable by default. I try to change it to corresponding type and save, but the saving don't take effect. The parameter SYS_COMPANION change back to disable after reboot.
I try the beta firmware too. The parameter SYS_COMPANION can be change and saved. The second uart works well.
By the way, The parameter SYS_USE_IO is enable by default even there is no IO ship on PH4-mini. To make the PWM OUTs working, I have to change it to disable manually. It is more convenient if the firmware recognize the FC type via rev or ver hardware, and set all parameters to correct type automatically.
 jamming
jamming
All 17 comments
I am working on the docs for this right now: https://github.com/PX4/px4_user_guide/pull/352
The summary is that SYS_COMPANION is no longer supported. Now you use a *_CFG or *_CONFIG parameter for a particular service or peripheral to set the port that it uses.
 hamishwillee
on 28 Sep 2018
hamishwillee
on 28 Sep 2018
In a resent PR SYS_USE_IO is set to 0 here https://github.com/PX4/Firmware/blob/master/ROMFS/px4fmu_common/init.d/rcS#L377 for the mini.
@jamming OK to close?
 davids5
on 11 Oct 2018
davids5
on 11 Oct 2018
I am working on the docs for this right now: PX4/px4_user_guide#352
The summary is that SYS_COMPANION is no longer supported. Now you use a *_CFG or *_CONFIG parameter for a particular service or peripheral to set the port that it uses.
@hamishwillee Is the the case for 1.8.0 stable?
davids5
on 18 Oct 2018
@hamishwillee Is the the case for 1.8.0 stable?
@davids5 No. The docs reflect master.
hamishwillee
on 19 Oct 2018
@dagar @davids5 this issue still exist for PH4mini with master according to @jamming
 jinger26
on 3 Dec 2018
jinger26
on 3 Dec 2018
@jinger26 - @dagar and I are unclear on what the issue is. The schematic calls the connector TELEM4, the product has a label that says UART & I2C B. Since there is not TELEM3 calling the port on the product TELEM 4 would not make sense. @dagar is looking into changing the metadata that QGC uses to label it the same as on the product. 'UART & I2C B' We also need a way to tell QGC that the connectors on the
V5 mini are a subset of the V5.
davids5
on 3 Dec 2018
@jinger26 Allso The https://docs.px4.io/en/assembly/quick_start_pixhawk4_mini.html has the wrong picture. @hamishwillee
davids5
on 3 Dec 2018
@davids5 There are heaps of images on that page - which one specifically is wrong, and in what way? @jinger26 provided this page - all I did was help with subediting.
hamishwillee
on 3 Dec 2018
@hamishwillee
davids5
on 3 Dec 2018
THanks @davids5 . @jinger26 This is going to have to come from you - I don't have any other imagery.
I'm happy to add the image to the book if you can email me the right version
hamishwillee
on 3 Dec 2018
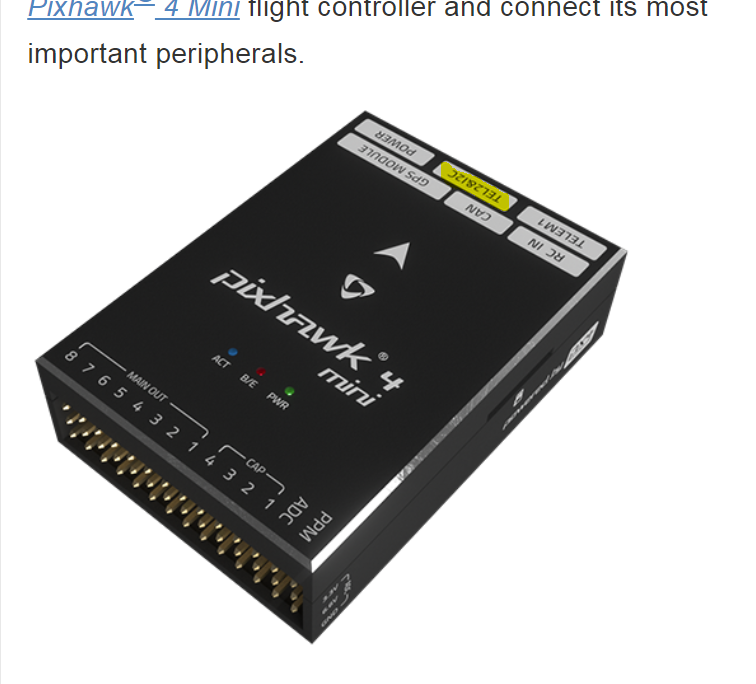
UART&I2CB should be a multipurpose port, we can connect different peripherals(Telemetry, Additional GPS, OSD, etc ) on it.
UART Mapping example for PH4-mini
QGC side CPU side
•SERIAL0 -> USB
•SERIAL1 -> UART2 (Telem1)
•SERIAL2 -> UART4 (Telem2, Additional GPS, OSD, etc )
•SERIAL3 -> UART1 (GPS)
•SERIAL4 -> UART6 (RCIN port)
•SERIAL5 -> UART7 (debug)
The Telem1 port has RTS/CTS pins, the other UARTs do not have RTS/CTS.
PH4-mini pinout

jamming
on 4 Dec 2018
@hamishwillee, @jamming provided some images in the link above. Will that work?
davids5
on 4 Dec 2018
@davids5 No, but the PR from @pfjare did: https://github.com/PX4/px4_user_guide/pull/396 :-)
Fixed: https://docs.px4.io/en/flight_controller/pixhawk4_mini.html
hamishwillee
on 5 Dec 2018
Rewriting Holybro's feedback here:
If "UART&I2CB" is not configurable, then the port loses its original design purpose (to enable multipurpose functionalities that could be set by users, i.e. dual GPS); right now the firmware does not assign default value to UART4, nor have a parameter that users can access to configure in QGC.
Also parameters not in sync with doc parameter reference page (https://dev.px4.io/en/advanced/parameter_reference.html). The doc reflects master, and Pixhawk 4/mini are shipped with lastest stable, I think @hamishwillee has a WIP PR on this version control; and @LorenzMeier mentioned on the dev-call to file a request under QGC for a robust caching/storage system for all parameters.
jinger26
on 6 Dec 2018
, I think @hamishwillee has a WIP PR on this version control;
I have an issue that specifies what I need. The work has to be done in Jenkins by @dagar. Essentially this will allow us to build (and cross link) complete doc sets for each release. I do not know when this is scheduled.
But this will not automatically result in docs builds for older releases. I took a tag 10 days ago https://github.com/PX4/Devguide/releases/tag/v1.8.2. If that doesn't have the correct parameters "current stable parameters" then someone will need to find the docs version that has them and we could perhaps take a branch from that.
Note also that I don't plan to update past docs with new improvements by default. So fixes to the images etc that went into master after a branch might not appear in the old version of the docs. I can address this on a case by case basis - but I'd prefer not to do much because there is more than enough work to do.
Note that whatever it ships with, our expectation is that people would update to newer firmware versions.
hamishwillee
on 7 Dec 2018
This issue has been automatically marked as stale because it has not had recent activity. It will be closed if no further activity occurs. Thank you for your contributions.
![stale[bot] picture](https://avatars3.githubusercontent.com/in/1724?v=4&s=40) stale[bot]
on 24 Jun 2019
stale[bot]
on 24 Jun 2019
Closing as stale.
stale[bot]
on 8 Jul 2019
Related issues
 rkintada
·
158Comments
rkintada
·
158Comments
 kd0aij
·
46Comments
kd0aij
·
46Comments
 LJ0707
·
29Comments
LJ0707
·
29Comments
 jinchengde
·
31Comments
jinchengde
·
31Comments
 MaEtUgR
·
62Comments
MaEtUgR
·
62Comments
Most helpful comment
@davids5 No, but the PR from @pfjare did: https://github.com/PX4/px4_user_guide/pull/396 :-)
Fixed: https://docs.px4.io/en/flight_controller/pixhawk4_mini.html