Mujoco-py: fatal error: mjmodel.h: No such file or directory
Below is the error, i believe others are having this issue but I couldnt find a solution. Also trying this from a Mac.
Failed building wheel for mujoco-py
Running setup.py clean for mujoco-py
Failed to build mujoco-py
Installing collected packages: mujoco-py
Running setup.py install for mujoco-py ... error
Complete output from command "/Users/marctheshark/Documents/MODELING AND SIMULATION/Machine Learning/Final Project/venv/bin/python" -u -c "import setuptools, tokenize;__file__='/private/var/folders/p9/4tsd_xb54pq4fdbvckmx7ry80000gn/T/pip-install-j08pcfid/mujoco-py/setup.py';f=getattr(tokenize, 'open', open)(__file__);code=f.read().replace('\r\n', '\n');f.close();exec(compile(code, __file__, 'exec'))" install --record /private/var/folders/p9/4tsd_xb54pq4fdbvckmx7ry80000gn/T/pip-record-k64zsvxg/install-record.txt --single-version-externally-managed --compile --install-headers "/Users/marctheshark/Documents/MODELING AND SIMULATION/Machine Learning/Final Project/venv/include/site/python3.7/mujoco-py":
running install
running build
Removing old mujoco_py cext /private/var/folders/p9/4tsd_xb54pq4fdbvckmx7ry80000gn/T/pip-install-j08pcfid/mujoco-py/mujoco_py/generated/cymj_1.50.1.62_37_macextensionbuilder_37.so
running build_ext
building 'mujoco_py.cymj' extension
/usr/local/bin/gcc-8 -Wno-unused-result -Wsign-compare -Wunreachable-code -fno-common -dynamic -DNDEBUG -g -fwrapv -O3 -Wall -arch x86_64 -g -DONMAC -Imujoco_py -I/private/var/folders/p9/4tsd_xb54pq4fdbvckmx7ry80000gn/T/pip-install-j08pcfid/mujoco-py/mujoco_py -I/Users/marctheshark/.mujoco/mjpro150/include -I/Users/marctheshark/Documents/MODELING AND SIMULATION/Machine Learning/Final Project/venv/lib/python3.7/site-packages/numpy/core/include -I/Users/marctheshark/Documents/MODELING AND SIMULATION/Machine Learning/Final Project/venv/include -I/Library/Frameworks/Python.framework/Versions/3.7/include/python3.7m -c /private/var/folders/p9/4tsd_xb54pq4fdbvckmx7ry80000gn/T/pip-install-j08pcfid/mujoco-py/mujoco_py/cymj.c -o /private/var/folders/p9/4tsd_xb54pq4fdbvckmx7ry80000gn/T/pip-install-j08pcfid/mujoco-py/mujoco_py/generated/_pyxbld_1.50.1.62_37_macextensionbuilder/temp.macosx-10.9-x86_64-3.7/private/var/folders/p9/4tsd_xb54pq4fdbvckmx7ry80000gn/T/pip-install-j08pcfid/mujoco-py/mujoco_py/cymj.o -fopenmp -w
/private/var/folders/p9/4tsd_xb54pq4fdbvckmx7ry80000gn/T/pip-install-j08pcfid/mujoco-py/mujoco_py/cymj.c:658:10: fatal error: mjmodel.h: No such file or directory
#include "mjmodel.h"
(venv) Marcs-MacBook-Pro:Final Project marctheshark$ pip3 install mujoco-py --user
Collecting mujoco-py
Using cached https://files.pythonhosted.org/packages/74/87/02595fadd8ec1a9146745c5c3ea9ff4e3d290fd4216a4a36bc88cba3f522/mujoco-py-1.50.1.62.tar.gz
Requirement already satisfied: glfw>=1.4.0 in ./venv/lib/python3.7/site-packages (from mujoco-py) (1.7.0)
Requirement already satisfied: numpy>=1.11 in ./venv/lib/python3.7/site-packages (from mujoco-py) (1.15.2)
Requirement already satisfied: Cython>=0.27.2 in ./venv/lib/python3.7/site-packages (from mujoco-py) (0.29)
Requirement already satisfied: imageio>=2.1.2 in ./venv/lib/python3.7/site-packages (from mujoco-py) (2.4.1)
Requirement already satisfied: cffi>=1.10 in ./venv/lib/python3.7/site-packages (from mujoco-py) (1.11.5)
Requirement already satisfied: lockfile>=0.12.2 in ./venv/lib/python3.7/site-packages (from mujoco-py) (0.12.2)
Requirement already satisfied: pillow in ./venv/lib/python3.7/site-packages (from imageio>=2.1.2->mujoco-py) (5.3.0)
Requirement already satisfied: pycparser in ./venv/lib/python3.7/site-packages (from cffi>=1.10->mujoco-py) (2.19)
Building wheels for collected packages: mujoco-py
Running setup.py bdist_wheel for mujoco-py ... error
Complete output from command "/Users/marctheshark/Documents/MODELING AND SIMULATION/Machine Learning/Final Project/venv/bin/python" -u -c "import setuptools, tokenize;__file__='/private/var/folders/p9/4tsd_xb54pq4fdbvckmx7ry80000gn/T/pip-install-87ikc8y0/mujoco-py/setup.py';f=getattr(tokenize, 'open', open)(__file__);code=f.read().replace('\r\n', '\n');f.close();exec(compile(code, __file__, 'exec'))" bdist_wheel -d /private/var/folders/p9/4tsd_xb54pq4fdbvckmx7ry80000gn/T/pip-wheel-1mcafkgm --python-tag cp37:
running bdist_wheel
running build
Removing old mujoco_py cext /private/var/folders/p9/4tsd_xb54pq4fdbvckmx7ry80000gn/T/pip-install-87ikc8y0/mujoco-py/mujoco_py/generated/cymj_1.50.1.62_37_macextensionbuilder_37.so
Compiling /private/var/folders/p9/4tsd_xb54pq4fdbvckmx7ry80000gn/T/pip-install-87ikc8y0/mujoco-py/mujoco_py/cymj.pyx because it changed.
[1/1] Cythonizing /private/var/folders/p9/4tsd_xb54pq4fdbvckmx7ry80000gn/T/pip-install-87ikc8y0/mujoco-py/mujoco_py/cymj.pyx
warning: mujoco_py/generated/../pxd/mjmodel.pxd:99:4: 'mjtDisableBit' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:114:4: 'mjtEnableBit' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:121:4: 'mjtJoint' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:127:4: 'mjtGeom' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:149:4: 'mjtCamLight' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:157:4: 'mjtTexture' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:163:4: 'mjtIntegrator' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:168:4: 'mjtCollision' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:174:4: 'mjtCone' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:179:4: 'mjtJacobian' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:185:4: 'mjtSolver' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:191:4: 'mjtImp' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:198:4: 'mjtRef' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:203:4: 'mjtEq' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:211:4: 'mjtWrap' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:220:4: 'mjtTrn' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:230:4: 'mjtDyn' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:237:4: 'mjtGain' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:242:4: 'mjtBias' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:248:4: 'mjtObj' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:274:4: 'mjtConstraint' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:285:4: 'mjtConstraintState' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:294:4: 'mjtSensor' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:338:4: 'mjtStage' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:345:4: 'mjtDataType' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:99:4: 'mjtDisableBit' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:114:4: 'mjtEnableBit' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:121:4: 'mjtJoint' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:127:4: 'mjtGeom' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:149:4: 'mjtCamLight' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:157:4: 'mjtTexture' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:163:4: 'mjtIntegrator' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:168:4: 'mjtCollision' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:174:4: 'mjtCone' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:179:4: 'mjtJacobian' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:185:4: 'mjtSolver' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:191:4: 'mjtImp' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:198:4: 'mjtRef' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:203:4: 'mjtEq' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:211:4: 'mjtWrap' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:220:4: 'mjtTrn' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:230:4: 'mjtDyn' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:237:4: 'mjtGain' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:242:4: 'mjtBias' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:248:4: 'mjtObj' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:274:4: 'mjtConstraint' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:285:4: 'mjtConstraintState' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:294:4: 'mjtSensor' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:338:4: 'mjtStage' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:345:4: 'mjtDataType' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:75:4: 'mjtNum' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:77:10: 'mjPI' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:78:10: 'mjMAXVAL' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:79:10: 'mjMINMU' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:80:10: 'mjMINIMP' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:81:10: 'mjMAXIMP' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:82:10: 'mjMAXCONPAIR' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:83:10: 'mjMAXVFS' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:84:10: 'mjMAXVFSNAME' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:87:10: 'mjNEQDATA' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:88:10: 'mjNDYN' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:89:10: 'mjNGAIN' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:90:10: 'mjNBIAS' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:91:10: 'mjNREF' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:92:10: 'mjNIMP' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:93:10: 'mjNSOLVER' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:96:4: 'mjtByte' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:100:8: 'mjDSBL_CONSTRAINT' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:101:8: 'mjDSBL_EQUALITY' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:102:8: 'mjDSBL_FRICTIONLOSS' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:103:8: 'mjDSBL_LIMIT' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:104:8: 'mjDSBL_CONTACT' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:105:8: 'mjDSBL_PASSIVE' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:106:8: 'mjDSBL_GRAVITY' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:107:8: 'mjDSBL_CLAMPCTRL' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:108:8: 'mjDSBL_WARMSTART' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:109:8: 'mjDSBL_FILTERPARENT' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:110:8: 'mjDSBL_ACTUATION' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:111:8: 'mjDSBL_REFSAFE' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:112:10: 'mjNDISABLE' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:115:8: 'mjENBL_OVERRIDE' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:116:8: 'mjENBL_ENERGY' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:117:8: 'mjENBL_FWDINV' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:118:8: 'mjENBL_SENSORNOISE' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:119:10: 'mjNENABLE' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:122:8: 'mjJNT_FREE' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:123:8: 'mjJNT_BALL' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:124:8: 'mjJNT_SLIDE' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:125:8: 'mjJNT_HINGE' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:129:8: 'mjGEOM_PLANE' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:130:8: 'mjGEOM_HFIELD' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:131:8: 'mjGEOM_SPHERE' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:132:8: 'mjGEOM_CAPSULE' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:133:8: 'mjGEOM_ELLIPSOID' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:134:8: 'mjGEOM_CYLINDER' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:135:8: 'mjGEOM_BOX' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:136:8: 'mjGEOM_MESH' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:138:8: 'mjNGEOMTYPES' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:141:8: 'mjGEOM_ARROW' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:142:8: 'mjGEOM_ARROW1' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:143:8: 'mjGEOM_ARROW2' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:144:8: 'mjGEOM_LABEL' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:146:8: 'mjGEOM_NONE' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:150:8: 'mjCAMLIGHT_FIXED' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:151:8: 'mjCAMLIGHT_TRACK' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:152:8: 'mjCAMLIGHT_TRACKCOM' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:153:8: 'mjCAMLIGHT_TARGETBODY' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:154:8: 'mjCAMLIGHT_TARGETBODYCOM' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:158:8: 'mjTEXTURE_2D' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:159:8: 'mjTEXTURE_CUBE' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:160:8: 'mjTEXTURE_SKYBOX' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:164:8: 'mjINT_EULER' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:165:8: 'mjINT_RK4' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:169:8: 'mjCOL_ALL' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:170:8: 'mjCOL_PAIR' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:171:8: 'mjCOL_DYNAMIC' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:175:8: 'mjCONE_PYRAMIDAL' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:176:8: 'mjCONE_ELLIPTIC' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:180:8: 'mjJAC_DENSE' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:181:8: 'mjJAC_SPARSE' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:182:8: 'mjJAC_AUTO' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:186:8: 'mjSOL_PGS' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:187:8: 'mjSOL_CG' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:188:8: 'mjSOL_NEWTON' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:192:8: 'mjIMP_CONSTANT' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:193:8: 'mjIMP_SIGMOID' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:194:8: 'mjIMP_LINEAR' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:195:8: 'mjIMP_USER' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:199:8: 'mjREF_SPRING' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:200:8: 'mjREF_USER' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:204:8: 'mjEQ_CONNECT' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:205:8: 'mjEQ_WELD' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:206:8: 'mjEQ_JOINT' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:207:8: 'mjEQ_TENDON' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:208:8: 'mjEQ_DISTANCE' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:212:8: 'mjWRAP_NONE' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:213:8: 'mjWRAP_JOINT' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:214:8: 'mjWRAP_PULLEY' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:215:8: 'mjWRAP_SITE' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:216:8: 'mjWRAP_SPHERE' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:217:8: 'mjWRAP_CYLINDER' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:221:8: 'mjTRN_JOINT' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:222:8: 'mjTRN_JOINTINPARENT' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:223:8: 'mjTRN_SLIDERCRANK' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:224:8: 'mjTRN_TENDON' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:225:8: 'mjTRN_SITE' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:227:8: 'mjTRN_UNDEFINED' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:231:8: 'mjDYN_NONE' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:232:8: 'mjDYN_INTEGRATOR' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:233:8: 'mjDYN_FILTER' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:234:8: 'mjDYN_USER' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:238:8: 'mjGAIN_FIXED' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:239:8: 'mjGAIN_USER' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:243:8: 'mjBIAS_NONE' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:244:8: 'mjBIAS_AFFINE' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:245:8: 'mjBIAS_USER' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:249:8: 'mjOBJ_UNKNOWN' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:250:8: 'mjOBJ_BODY' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:251:8: 'mjOBJ_XBODY' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:252:8: 'mjOBJ_JOINT' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:253:8: 'mjOBJ_DOF' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:254:8: 'mjOBJ_GEOM' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:255:8: 'mjOBJ_SITE' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:256:8: 'mjOBJ_CAMERA' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:257:8: 'mjOBJ_LIGHT' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:258:8: 'mjOBJ_MESH' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:259:8: 'mjOBJ_HFIELD' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:260:8: 'mjOBJ_TEXTURE' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:261:8: 'mjOBJ_MATERIAL' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:262:8: 'mjOBJ_PAIR' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:263:8: 'mjOBJ_EXCLUDE' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:264:8: 'mjOBJ_EQUALITY' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:265:8: 'mjOBJ_TENDON' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:266:8: 'mjOBJ_ACTUATOR' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:267:8: 'mjOBJ_SENSOR' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:268:8: 'mjOBJ_NUMERIC' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:269:8: 'mjOBJ_TEXT' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:270:8: 'mjOBJ_TUPLE' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:271:8: 'mjOBJ_KEY' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:275:8: 'mjCNSTR_EQUALITY' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:276:8: 'mjCNSTR_FRICTION_DOF' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:277:8: 'mjCNSTR_FRICTION_TENDON' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:278:8: 'mjCNSTR_LIMIT_JOINT' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:279:8: 'mjCNSTR_LIMIT_TENDON' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:280:8: 'mjCNSTR_CONTACT_FRICTIONLESS' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:281:8: 'mjCNSTR_CONTACT_PYRAMIDAL' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:282:8: 'mjCNSTR_CONTACT_ELLIPTIC' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:286:8: 'mjCNSTRSTATE_SATISFIED' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:287:8: 'mjCNSTRSTATE_QUADRATIC' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:288:8: 'mjCNSTRSTATE_LINEARNEG' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:289:8: 'mjCNSTRSTATE_LINEARPOS' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:290:8: 'mjCNSTRSTATE_CONE' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:296:8: 'mjSENS_TOUCH' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:297:8: 'mjSENS_ACCELEROMETER' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:298:8: 'mjSENS_VELOCIMETER' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:299:8: 'mjSENS_GYRO' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:300:8: 'mjSENS_FORCE' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:301:8: 'mjSENS_TORQUE' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:302:8: 'mjSENS_MAGNETOMETER' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:303:8: 'mjSENS_RANGEFINDER' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:306:8: 'mjSENS_JOINTPOS' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:307:8: 'mjSENS_JOINTVEL' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:308:8: 'mjSENS_TENDONPOS' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:309:8: 'mjSENS_TENDONVEL' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:310:8: 'mjSENS_ACTUATORPOS' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:311:8: 'mjSENS_ACTUATORVEL' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:312:8: 'mjSENS_ACTUATORFRC' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:315:8: 'mjSENS_BALLQUAT' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:316:8: 'mjSENS_BALLANGVEL' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:319:8: 'mjSENS_FRAMEPOS' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:320:8: 'mjSENS_FRAMEQUAT' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:321:8: 'mjSENS_FRAMEXAXIS' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:322:8: 'mjSENS_FRAMEYAXIS' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:323:8: 'mjSENS_FRAMEZAXIS' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:324:8: 'mjSENS_FRAMELINVEL' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:325:8: 'mjSENS_FRAMEANGVEL' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:326:8: 'mjSENS_FRAMELINACC' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:327:8: 'mjSENS_FRAMEANGACC' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:330:8: 'mjSENS_SUBTREECOM' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:331:8: 'mjSENS_SUBTREELINVEL' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:332:8: 'mjSENS_SUBTREEANGMOM' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:335:8: 'mjSENS_USER' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:339:8: 'mjSTAGE_NONE' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:340:8: 'mjSTAGE_POS' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:341:8: 'mjSTAGE_VEL' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:342:8: 'mjSTAGE_ACC' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:346:8: 'mjDATATYPE_REAL' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:347:8: 'mjDATATYPE_POSITIVE' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:348:8: 'mjDATATYPE_AXIS' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:349:8: 'mjDATATYPE_QUAT' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:75:4: 'mjtNum' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:77:10: 'mjPI' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:78:10: 'mjMAXVAL' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:79:10: 'mjMINMU' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:80:10: 'mjMINIMP' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:81:10: 'mjMAXIMP' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:82:10: 'mjMAXCONPAIR' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:83:10: 'mjMAXVFS' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:84:10: 'mjMAXVFSNAME' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:87:10: 'mjNEQDATA' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:88:10: 'mjNDYN' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:89:10: 'mjNGAIN' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:90:10: 'mjNBIAS' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:91:10: 'mjNREF' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:92:10: 'mjNIMP' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:93:10: 'mjNSOLVER' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:96:4: 'mjtByte' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:100:8: 'mjDSBL_CONSTRAINT' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:101:8: 'mjDSBL_EQUALITY' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:102:8: 'mjDSBL_FRICTIONLOSS' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:103:8: 'mjDSBL_LIMIT' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:104:8: 'mjDSBL_CONTACT' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:105:8: 'mjDSBL_PASSIVE' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:106:8: 'mjDSBL_GRAVITY' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:107:8: 'mjDSBL_CLAMPCTRL' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:108:8: 'mjDSBL_WARMSTART' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:109:8: 'mjDSBL_FILTERPARENT' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:110:8: 'mjDSBL_ACTUATION' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:111:8: 'mjDSBL_REFSAFE' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:112:10: 'mjNDISABLE' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:115:8: 'mjENBL_OVERRIDE' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:116:8: 'mjENBL_ENERGY' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:117:8: 'mjENBL_FWDINV' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:118:8: 'mjENBL_SENSORNOISE' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:119:10: 'mjNENABLE' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:122:8: 'mjJNT_FREE' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:123:8: 'mjJNT_BALL' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:124:8: 'mjJNT_SLIDE' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:125:8: 'mjJNT_HINGE' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:129:8: 'mjGEOM_PLANE' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:130:8: 'mjGEOM_HFIELD' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:131:8: 'mjGEOM_SPHERE' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:132:8: 'mjGEOM_CAPSULE' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:133:8: 'mjGEOM_ELLIPSOID' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:134:8: 'mjGEOM_CYLINDER' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:135:8: 'mjGEOM_BOX' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:136:8: 'mjGEOM_MESH' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:138:8: 'mjNGEOMTYPES' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:141:8: 'mjGEOM_ARROW' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:142:8: 'mjGEOM_ARROW1' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:143:8: 'mjGEOM_ARROW2' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:144:8: 'mjGEOM_LABEL' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:146:8: 'mjGEOM_NONE' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:150:8: 'mjCAMLIGHT_FIXED' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:151:8: 'mjCAMLIGHT_TRACK' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:152:8: 'mjCAMLIGHT_TRACKCOM' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:153:8: 'mjCAMLIGHT_TARGETBODY' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:154:8: 'mjCAMLIGHT_TARGETBODYCOM' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:158:8: 'mjTEXTURE_2D' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:159:8: 'mjTEXTURE_CUBE' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:160:8: 'mjTEXTURE_SKYBOX' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:164:8: 'mjINT_EULER' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:165:8: 'mjINT_RK4' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:169:8: 'mjCOL_ALL' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:170:8: 'mjCOL_PAIR' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:171:8: 'mjCOL_DYNAMIC' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:175:8: 'mjCONE_PYRAMIDAL' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:176:8: 'mjCONE_ELLIPTIC' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:180:8: 'mjJAC_DENSE' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:181:8: 'mjJAC_SPARSE' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:182:8: 'mjJAC_AUTO' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:186:8: 'mjSOL_PGS' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:187:8: 'mjSOL_CG' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:188:8: 'mjSOL_NEWTON' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:192:8: 'mjIMP_CONSTANT' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:193:8: 'mjIMP_SIGMOID' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:194:8: 'mjIMP_LINEAR' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:195:8: 'mjIMP_USER' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:199:8: 'mjREF_SPRING' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:200:8: 'mjREF_USER' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:204:8: 'mjEQ_CONNECT' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:205:8: 'mjEQ_WELD' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:206:8: 'mjEQ_JOINT' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:207:8: 'mjEQ_TENDON' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:208:8: 'mjEQ_DISTANCE' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:212:8: 'mjWRAP_NONE' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:213:8: 'mjWRAP_JOINT' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:214:8: 'mjWRAP_PULLEY' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:215:8: 'mjWRAP_SITE' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:216:8: 'mjWRAP_SPHERE' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:217:8: 'mjWRAP_CYLINDER' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:221:8: 'mjTRN_JOINT' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:222:8: 'mjTRN_JOINTINPARENT' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:223:8: 'mjTRN_SLIDERCRANK' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:224:8: 'mjTRN_TENDON' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:225:8: 'mjTRN_SITE' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:227:8: 'mjTRN_UNDEFINED' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:231:8: 'mjDYN_NONE' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:232:8: 'mjDYN_INTEGRATOR' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:233:8: 'mjDYN_FILTER' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:234:8: 'mjDYN_USER' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:238:8: 'mjGAIN_FIXED' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:239:8: 'mjGAIN_USER' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:243:8: 'mjBIAS_NONE' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:244:8: 'mjBIAS_AFFINE' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:245:8: 'mjBIAS_USER' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:249:8: 'mjOBJ_UNKNOWN' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:250:8: 'mjOBJ_BODY' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:251:8: 'mjOBJ_XBODY' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:252:8: 'mjOBJ_JOINT' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:253:8: 'mjOBJ_DOF' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:254:8: 'mjOBJ_GEOM' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:255:8: 'mjOBJ_SITE' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:256:8: 'mjOBJ_CAMERA' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:257:8: 'mjOBJ_LIGHT' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:258:8: 'mjOBJ_MESH' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:259:8: 'mjOBJ_HFIELD' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:260:8: 'mjOBJ_TEXTURE' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:261:8: 'mjOBJ_MATERIAL' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:262:8: 'mjOBJ_PAIR' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:263:8: 'mjOBJ_EXCLUDE' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:264:8: 'mjOBJ_EQUALITY' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:265:8: 'mjOBJ_TENDON' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:266:8: 'mjOBJ_ACTUATOR' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:267:8: 'mjOBJ_SENSOR' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:268:8: 'mjOBJ_NUMERIC' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:269:8: 'mjOBJ_TEXT' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:270:8: 'mjOBJ_TUPLE' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:271:8: 'mjOBJ_KEY' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:275:8: 'mjCNSTR_EQUALITY' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:276:8: 'mjCNSTR_FRICTION_DOF' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:277:8: 'mjCNSTR_FRICTION_TENDON' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:278:8: 'mjCNSTR_LIMIT_JOINT' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:279:8: 'mjCNSTR_LIMIT_TENDON' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:280:8: 'mjCNSTR_CONTACT_FRICTIONLESS' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:281:8: 'mjCNSTR_CONTACT_PYRAMIDAL' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:282:8: 'mjCNSTR_CONTACT_ELLIPTIC' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:286:8: 'mjCNSTRSTATE_SATISFIED' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:287:8: 'mjCNSTRSTATE_QUADRATIC' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:288:8: 'mjCNSTRSTATE_LINEARNEG' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:289:8: 'mjCNSTRSTATE_LINEARPOS' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:290:8: 'mjCNSTRSTATE_CONE' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:296:8: 'mjSENS_TOUCH' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:297:8: 'mjSENS_ACCELEROMETER' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:298:8: 'mjSENS_VELOCIMETER' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:299:8: 'mjSENS_GYRO' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:300:8: 'mjSENS_FORCE' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:301:8: 'mjSENS_TORQUE' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:302:8: 'mjSENS_MAGNETOMETER' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:303:8: 'mjSENS_RANGEFINDER' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:306:8: 'mjSENS_JOINTPOS' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:307:8: 'mjSENS_JOINTVEL' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:308:8: 'mjSENS_TENDONPOS' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:309:8: 'mjSENS_TENDONVEL' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:310:8: 'mjSENS_ACTUATORPOS' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:311:8: 'mjSENS_ACTUATORVEL' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:312:8: 'mjSENS_ACTUATORFRC' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:315:8: 'mjSENS_BALLQUAT' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:316:8: 'mjSENS_BALLANGVEL' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:319:8: 'mjSENS_FRAMEPOS' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:320:8: 'mjSENS_FRAMEQUAT' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:321:8: 'mjSENS_FRAMEXAXIS' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:322:8: 'mjSENS_FRAMEYAXIS' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:323:8: 'mjSENS_FRAMEZAXIS' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:324:8: 'mjSENS_FRAMELINVEL' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:325:8: 'mjSENS_FRAMEANGVEL' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:326:8: 'mjSENS_FRAMELINACC' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:327:8: 'mjSENS_FRAMEANGACC' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:330:8: 'mjSENS_SUBTREECOM' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:331:8: 'mjSENS_SUBTREELINVEL' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:332:8: 'mjSENS_SUBTREEANGMOM' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:335:8: 'mjSENS_USER' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:339:8: 'mjSTAGE_NONE' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:340:8: 'mjSTAGE_POS' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:341:8: 'mjSTAGE_VEL' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:342:8: 'mjSTAGE_ACC' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:346:8: 'mjDATATYPE_REAL' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:347:8: 'mjDATATYPE_POSITIVE' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:348:8: 'mjDATATYPE_AXIS' redeclared
warning: mujoco_py/generated/../pxd/mjmodel.pxd:349:8: 'mjDATATYPE_QUAT' redeclared
running build_ext
building 'mujoco_py.cymj' extension
creating /private/var/folders/p9/4tsd_xb54pq4fdbvckmx7ry80000gn/T/pip-install-87ikc8y0/mujoco-py/mujoco_py/generated/_pyxbld_1.50.1.62_37_macextensionbuilder
creating /private/var/folders/p9/4tsd_xb54pq4fdbvckmx7ry80000gn/T/pip-install-87ikc8y0/mujoco-py/mujoco_py/generated/_pyxbld_1.50.1.62_37_macextensionbuilder/temp.macosx-10.9-x86_64-3.7
creating /private/var/folders/p9/4tsd_xb54pq4fdbvckmx7ry80000gn/T/pip-install-87ikc8y0/mujoco-py/mujoco_py/generated/_pyxbld_1.50.1.62_37_macextensionbuilder/temp.macosx-10.9-x86_64-3.7/private
creating /private/var/folders/p9/4tsd_xb54pq4fdbvckmx7ry80000gn/T/pip-install-87ikc8y0/mujoco-py/mujoco_py/generated/_pyxbld_1.50.1.62_37_macextensionbuilder/temp.macosx-10.9-x86_64-3.7/private/var
creating /private/var/folders/p9/4tsd_xb54pq4fdbvckmx7ry80000gn/T/pip-install-87ikc8y0/mujoco-py/mujoco_py/generated/_pyxbld_1.50.1.62_37_macextensionbuilder/temp.macosx-10.9-x86_64-3.7/private/var/folders
creating /private/var/folders/p9/4tsd_xb54pq4fdbvckmx7ry80000gn/T/pip-install-87ikc8y0/mujoco-py/mujoco_py/generated/_pyxbld_1.50.1.62_37_macextensionbuilder/temp.macosx-10.9-x86_64-3.7/private/var/folders/p9
creating /private/var/folders/p9/4tsd_xb54pq4fdbvckmx7ry80000gn/T/pip-install-87ikc8y0/mujoco-py/mujoco_py/generated/_pyxbld_1.50.1.62_37_macextensionbuilder/temp.macosx-10.9-x86_64-3.7/private/var/folders/p9/4tsd_xb54pq4fdbvckmx7ry80000gn
creating /private/var/folders/p9/4tsd_xb54pq4fdbvckmx7ry80000gn/T/pip-install-87ikc8y0/mujoco-py/mujoco_py/generated/_pyxbld_1.50.1.62_37_macextensionbuilder/temp.macosx-10.9-x86_64-3.7/private/var/folders/p9/4tsd_xb54pq4fdbvckmx7ry80000gn/T
creating /private/var/folders/p9/4tsd_xb54pq4fdbvckmx7ry80000gn/T/pip-install-87ikc8y0/mujoco-py/mujoco_py/generated/_pyxbld_1.50.1.62_37_macextensionbuilder/temp.macosx-10.9-x86_64-3.7/private/var/folders/p9/4tsd_xb54pq4fdbvckmx7ry80000gn/T/pip-install-87ikc8y0
creating /private/var/folders/p9/4tsd_xb54pq4fdbvckmx7ry80000gn/T/pip-install-87ikc8y0/mujoco-py/mujoco_py/generated/_pyxbld_1.50.1.62_37_macextensionbuilder/temp.macosx-10.9-x86_64-3.7/private/var/folders/p9/4tsd_xb54pq4fdbvckmx7ry80000gn/T/pip-install-87ikc8y0/mujoco-py
creating /private/var/folders/p9/4tsd_xb54pq4fdbvckmx7ry80000gn/T/pip-install-87ikc8y0/mujoco-py/mujoco_py/generated/_pyxbld_1.50.1.62_37_macextensionbuilder/temp.macosx-10.9-x86_64-3.7/private/var/folders/p9/4tsd_xb54pq4fdbvckmx7ry80000gn/T/pip-install-87ikc8y0/mujoco-py/mujoco_py
creating /private/var/folders/p9/4tsd_xb54pq4fdbvckmx7ry80000gn/T/pip-install-87ikc8y0/mujoco-py/mujoco_py/generated/_pyxbld_1.50.1.62_37_macextensionbuilder/temp.macosx-10.9-x86_64-3.7/private/var/folders/p9/4tsd_xb54pq4fdbvckmx7ry80000gn/T/pip-install-87ikc8y0/mujoco-py/mujoco_py/gl
/usr/local/bin/gcc-8 -Wno-unused-result -Wsign-compare -Wunreachable-code -fno-common -dynamic -DNDEBUG -g -fwrapv -O3 -Wall -arch x86_64 -g -DONMAC -Imujoco_py -I/private/var/folders/p9/4tsd_xb54pq4fdbvckmx7ry80000gn/T/pip-install-87ikc8y0/mujoco-py/mujoco_py -I/Users/marctheshark/.mujoco/mjpro150/include -I/Users/marctheshark/Documents/MODELING AND SIMULATION/Machine Learning/Final Project/venv/lib/python3.7/site-packages/numpy/core/include -I/Users/marctheshark/Documents/MODELING AND SIMULATION/Machine Learning/Final Project/venv/include -I/Library/Frameworks/Python.framework/Versions/3.7/include/python3.7m -c /private/var/folders/p9/4tsd_xb54pq4fdbvckmx7ry80000gn/T/pip-install-87ikc8y0/mujoco-py/mujoco_py/cymj.c -o /private/var/folders/p9/4tsd_xb54pq4fdbvckmx7ry80000gn/T/pip-install-87ikc8y0/mujoco-py/mujoco_py/generated/_pyxbld_1.50.1.62_37_macextensionbuilder/temp.macosx-10.9-x86_64-3.7/private/var/folders/p9/4tsd_xb54pq4fdbvckmx7ry80000gn/T/pip-install-87ikc8y0/mujoco-py/mujoco_py/cymj.o -fopenmp -w
/private/var/folders/p9/4tsd_xb54pq4fdbvckmx7ry80000gn/T/pip-install-87ikc8y0/mujoco-py/mujoco_py/cymj.c:658:10: fatal error: mjmodel.h: No such file or directory
#include "mjmodel.h"
^~~
compilation terminated.
error: command '/usr/local/bin/gcc-8' failed with exit status 1
 marctheshark3
marctheshark3
All 13 comments
@marctheshark3 the builder expects the headers to be in you $HOME/.mujoco/mjpro150/include folder -- can you check that those files are there?
 machinaut
on 19 Oct 2018
machinaut
on 19 Oct 2018
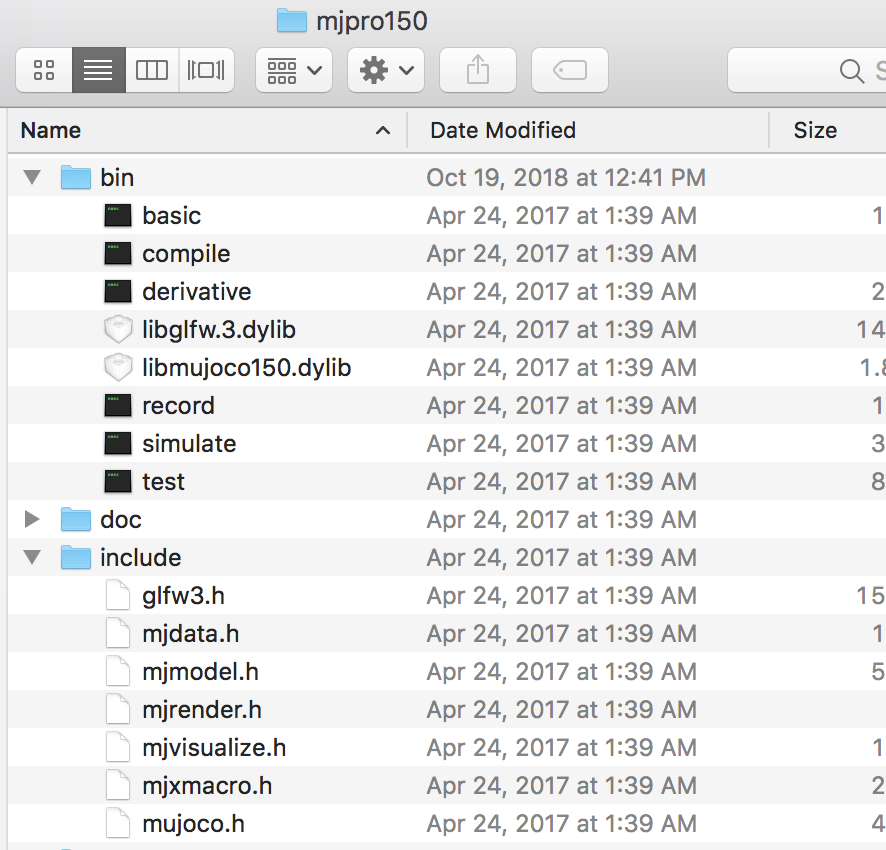
Yeah it is in there
marctheshark3
on 22 Oct 2018
@marctheshark3 I can't tell from the image if that folder is in $HOME/.mujoco/ but I'll trust you for that.
Do you get a new error with the latest version of mujoco-py? I pushed an update last week which should print out if it fails to find the mujoco library in the expected location,
machinaut
on 22 Oct 2018
Im having the same error. Any updates on this topic?
I double checked the paths and whether the headers exists in the $HOME/.mujoco/mjpro150/include directory.
 Fredeli
on 3 Mar 2019
Fredeli
on 3 Mar 2019
I had same problem and turned out that the dirs were correctly placed but the dir names were not as expected. The MuJoCo 2.0 version folder name starts with mujoco (which is what is added in the README file) however for 1.5 version folder name is expected to start with mjpro instead.
 ogail
on 25 Mar 2019
ogail
on 25 Mar 2019
Hi, I had the same problem. I deal with it by following way.
Check the paths ~/.mujoco/mujoco200 whether have an _include_ directory. If not, copy the _include_ whole folder to the correct directory.
 houyanxu
on 16 Apr 2019
houyanxu
on 16 Apr 2019
On Linux you probably wanna 7z x..., not 7z e...
 affficionado
on 19 May 2019
affficionado
on 19 May 2019

I am facing the same issue where the mjmodel.h file cannot be located. But the file does exist at the desired location

I am using ubuntu 16.04, python 3.5.2.
 adityagupte95
on 14 Jun 2019
adityagupte95
on 14 Jun 2019
@adityagupte95 for me moving everything inside ~/.mujoco/mujoco200/mujoco200_linux to ~/.mujoco/mujoco200/ and deleting the mujoco200_linux fixed the problem
 mahon94
on 5 Sep 2019
mahon94
on 5 Sep 2019
Most critically, I made a mistake of including /bin in the MJPRO_PATH for mujoco-py. See third-line below:
export LD_LIBRARY_PATH=$HOME/.mujoco/mujoco200/bin:$LD_LIBRARY_PATH
export MUJOCO_PY_MJPRO_PATH=$HOME/.mujoco/mujoco200/
export MUJOCO_PY_MJKEY_PATH=$HOME/.mujoco/mjkey.txt
worked. In addition I had to do
brew uninstall gcc
brew uninstall gcc@8
brew uninstall gcc@9
brew install gcc@6
Only the gcc@6 worked with this installation. OSX version is 10.14.6 (18G87)
Note this is also true on Linux. It seems that mujoco-py likes the path without the platform post-fix, where as DeepMind dm_controlsuite likes it with those post-fixes.
 geyang
on 21 Sep 2019
geyang
on 21 Sep 2019
@adityagupte95 for me moving everything inside ~/.mujoco/mujoco200/mujoco200_linux to ~/.mujoco/mujoco200/ and deleting the mujoco200_linux fixed the problem
Same! the tutorial is kinda confusing
 Kenivia
on 14 Oct 2019
Kenivia
on 14 Oct 2019
@adityagupte95 for me moving everything inside ~/.mujoco/mujoco200/mujoco200_linux to ~/.mujoco/mujoco200/ and deleting the mujoco200_linux fixed the problem
Great! Thanks a lot!
 ZQX323
on 7 May 2020
ZQX323
on 7 May 2020
@adityagupte95 for me moving everything inside ~/.mujoco/mujoco200/mujoco200_linux to ~/.mujoco/mujoco200/ and deleting the mujoco200_linux fixed the problem
Thanks a lot! Your solution worked for me.
 h3lio5
on 17 May 2020
h3lio5
on 17 May 2020
Related issues
 richardrl
·
16Comments
richardrl
·
16Comments
 foolyc
·
13Comments
foolyc
·
13Comments
 ravijo
·
35Comments
ravijo
·
35Comments
 hmishra2250
·
15Comments
hmishra2250
·
15Comments
 pat-coady
·
39Comments
pat-coady
·
39Comments
Most helpful comment
@adityagupte95 for me moving everything inside ~/.mujoco/mujoco200/mujoco200_linux to ~/.mujoco/mujoco200/ and deleting the mujoco200_linux fixed the problem