Marlin: [2.0.X] Compilation fails
Everything was set up correctly but compilation of the firmware fails.
Error message tells me:
#error "SENSORLESS_HOMING requires X_MIN_ENDSTOP_INVERTING when homing to X_MIN."
But i have it inverted:
#define X_MIN_ENDSTOP_INVERTING true
Chosen board:
#define MOTHERBOARD BOARD_RAMPS4DUE_EFB
Screenshot of config and error message:

 th33xitus
th33xitus
All 11 comments
Disable ENDSTOP_INTERRUPTS_FEATURE and try to compile.
If it still does not work, post your Configuration.h + Configuration_adv.h.
 Ludy87
on 28 Apr 2018
Ludy87
on 28 Apr 2018
The error will only appear if X_MIN_ENDSTOP_INVERTING is false. It's possible that you've edited a different configuration file from the one in the root folder. Quit Arduino IDE and re-start it. Double-check that the correct file (Marlin/Configuration.h) has in fact been edited. Then re-build. The error should go away if those conditions are confirmed.
 thinkyhead
on 28 Apr 2018
thinkyhead
on 28 Apr 2018
@thinkyhead I can assure you, that the files i am changing are in the right folders.
How do i know? I made a change in the config, saved it, looked at the "last modified timestamp" in my explorer and it tells me the current time. So it is definitely the right config-files i am editing here.
Error doesn't go away.
Here are my configuration files:
configuration.h_configuration_adv.h.zip
Commit i used:
a474a7e
Also i get another problem with compiling while having TMC2130 and SD_SUPPORT enabled both at a time. You want me to make a new bugreport for it or is it okay to discuss it here as well?
Having TMC2130 and SD_SUPPORT enables gives me the following error message while trying to compile:
DUE software SPI is required but is incompatible with TMC2130 hardware SPI. Enable TMC_USE_SW_SPI to fix.
Enabling software SPI is actually not an option since i want to use hardware SPI.
But i would love to use SD_SUPPORT as well.
th33xitus
on 28 Apr 2018
Well that is interesting! This prints both error lines:
#if X_MIN_ENDSTOP_INVERTING == true
#error "X_MIN_ENDSTOP_INVERTING == true"
#endif
#if DISABLED(X_MIN_ENDSTOP_INVERTING)
#error "X_MIN_ENDSTOP_INVERTING is also somehow 'DISABLED'!"
#endif
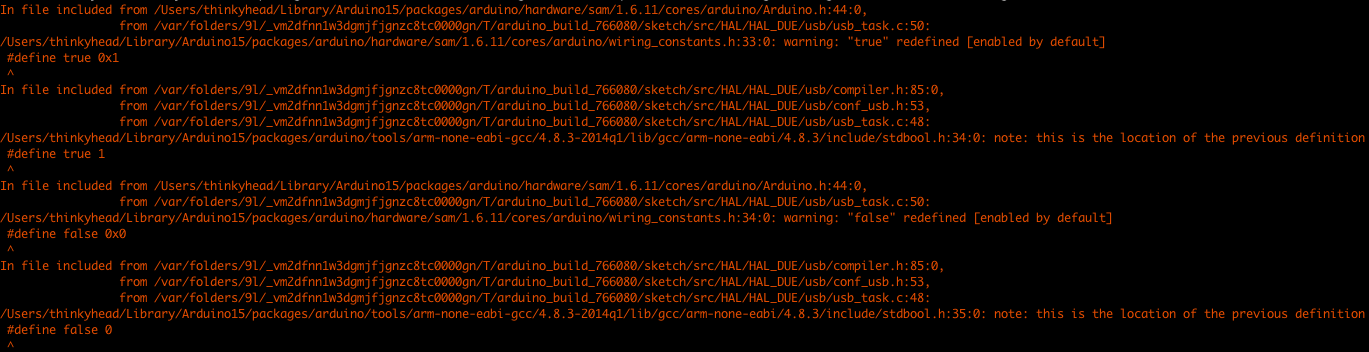
My guess at this point is that something in the DUE platform is messing with the DISABLED macro. Some more investigation to follow…
thinkyhead
on 28 Apr 2018
Okay :stuck_out_tongue:
I "bruteforced" the compilation with just deleting the corresponding sanity check for sensorless homing and then it compiled fine. But i get an instant driver error on startup. Didn't figure out the exact driver error i get since i wasn't able to get my OctoPrint connected to the Due (doesn't recognizes the USB-port for whatever reason) so i couldn't get the console output yet.
But i guess it's better to wait anyways so you guys can take a look and might fix the stuff which is broken instead of me doing workarounds with disabling sanitychecks and such stuff :smiley:
th33xitus
on 28 Apr 2018
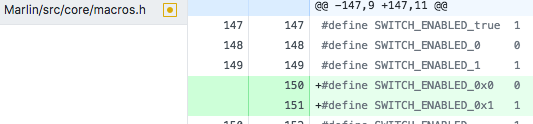
The Due platform defines false as 0x0 and true as 0x1…
…so this change has to be made to macros.h:
thinkyhead
on 28 Apr 2018
Now merged into bugfix-2.0.x.
thinkyhead
on 28 Apr 2018
@thinkyhead
Thank you for the fast solution. It actually compiled without any error now!
I will test the firmware in a few minutes, i have to reassemble my TMC2130 configuration again and then i will see.
Do you have any solution for the SD_SUPPORT and TMC2130 HW SPI conflict?
EDIT: I see you already closed this topic, you want me to make a new one? I guess so?
th33xitus
on 28 Apr 2018
you want me to make a new one?
Not if the "SD_SUPPORT and TMC2130 HW SPI conflict" issue already has a topic. Instead, post there. Anyway, no, I'm not working on that issue. That's outside my purview.
thinkyhead
on 28 Apr 2018
I downloaded the latest marlin, and still got that error. I commented it, and i'll report back when i finaly get the printer in. SKR V1.3 TMC2209 btw.
#if ENABLED(DELTA) && !BOTH(STEALTHCHOP_XY, STEALTHCHOP_Z)
#error "SENSORLESS_HOMING on DELTA currently requires STEALTHCHOP_XY and STEALTHCHOP_Z."
//#elif X_SENSORLESS && X_HOME_DIR == -1 && (X_MIN_ENDSTOP_INVERTING != X_ENDSTOP_INVERTING || DISABLED(ENDSTOPPULLUP_XMIN))
//#error "SENSORLESS_HOMING requires X_MIN_ENDSTOP_INVERTING and ENDSTOPPULLUP_XMIN when homing to X_MIN."
#elif X_SENSORLESS && X_HOME_DIR == 1 && (X_MAX_ENDSTOP_INVERTING != X_ENDSTOP_INVERTING || DISABLED(ENDSTOPPULLUP_XMAX))
#error "SENSORLESS_HOMING requires X_MAX_ENDSTOP_INVERTING and ENDSTOPPULLUP_XMAX when homing to X_MAX."
//#elif Y_SENSORLESS && Y_HOME_DIR == -1 && (Y_MIN_ENDSTOP_INVERTING != Y_ENDSTOP_INVERTING || DISABLED(ENDSTOPPULLUP_YMIN))
//#error "SENSORLESS_HOMING requires Y_MIN_ENDSTOP_INVERTING and ENDSTOPPULLUP_YMIN when homing to Y_MIN."
#elif Y_SENSORLESS && Y_HOME_DIR == 1 && (Y_MAX_ENDSTOP_INVERTING != Y_ENDSTOP_INVERTING || DISABLED(ENDSTOPPULLUP_YMAX))
#error "SENSORLESS_HOMING requires Y_MAX_ENDSTOP_INVERTING and ENDSTOPPULLUP_YMAX when homing to Y_MAX."
//#elif Z_SENSORLESS && Z_HOME_DIR == -1 && (Z_MIN_ENDSTOP_INVERTING != Z_ENDSTOP_INVERTING || DISABLED(ENDSTOPPULLUP_ZMIN))
//#error "SENSORLESS_HOMING requires Z_MIN_ENDSTOP_INVERTING and ENDSTOPPULLUP_ZMIN when homing to Z_MIN."
 StealthNinja1O1
on 27 Jun 2019
StealthNinja1O1
on 27 Jun 2019
This issue has been automatically locked since there has not been any recent activity after it was closed. Please open a new issue for related bugs.
![github-actions[bot] picture](https://avatars2.githubusercontent.com/in/15368?v=4&s=40) github-actions[bot]
on 5 Jul 2020
github-actions[bot]
on 5 Jul 2020
Related issues
 Tamonir
·
3Comments
Tamonir
·
3Comments
 Kaibob2
·
4Comments
Kaibob2
·
4Comments
 manianac
·
4Comments
manianac
·
4Comments
 Anion-anion
·
3Comments
Anion-anion
·
3Comments
 heming3501
·
4Comments
heming3501
·
4Comments
Most helpful comment
Now merged into
bugfix-2.0.x.