Jax: Time-efficient higher-order forward mode?
Have you guys given any thought to how to efficiently compute higher-order derivatives of scalar-input functions? I have a use for 4th- and 5th-order derivatives of a scalar-input, vector-output function, namely, regularizing ODEs to be easy to solve.
I'm not sure, but I think that in principle, the Nth-order derivative of a scalar-input function can be computed for about only N times the cost of evaluating the original function, if intermediate values are cached. We think we have a partial solution using https://github.com/JuliaDiff/TaylorSeries.jl, but I'd rather do it in JAX.
The following toy example takes time exponential in the order of the derivative:
from jax import jvp
import jax.numpy as np
def fwd_deriv(f):
def df(x):
return jvp(f, (x,), (1.0,))[1]
return df
def f(t):
return 0.3 * np.sin(t) * t**10
g = f
for i in range(10):
g = fwd_deriv(g)
print(g(1.1))
Is there a simple way to set things up with jvps and vjps to be more time-efficient, or do you think it would require a different type of autodiff entirely?
 duvenaud
duvenaud
All 18 comments
Great question.
One potential quick fix is that if you use @jit then XLA's common-subexpression elimination (CSE) might do some of this for you. But exponentially blowing up the computation we hand to XLA isn't a good idea even if XLA can CSE it back down.
Here's an adapted version of your script that shows the blowup:
from __future__ import print_function
from jax import jvp
import jax.numpy as np
from jax import make_jaxpr
def fwd_deriv(f):
def df(x):
return jvp(f, (x,), (1.0,))[1]
return df
def f(t):
return 0.3 * np.sin(t) * t**10
g = f
for i in range(5):
g = fwd_deriv(g)
print(g(1.1))
jaxpr = make_jaxpr(g)(1.1)
# print(jaxpr) # uncomment to show the blowup
print(len(jaxpr.eqns))
Here are the first two jaxprs:
6.657216
{ lambda b o n g k m e ; ; a.
let c = cos a
d = mul b c
f = mul d e
h = pow a g
i = mul f h
j = sin a
l = mul j k
p = pow a o
q = mul n p
r = safe_mul m q
s = mul l r
t = add_any i s
in t }
57.3042
{ lambda bs j bp s m br bc bo be bf c p bq bg h t b bm r z ; ; a.
let d = sin a
e = mul c d
f = neg e
g = mul b f
i = mul g h
k = pow a j
l = mul i k
n = cos a
o = mul m n
q = mul o p
u = pow a t
v = mul s u
w = safe_mul r v
x = mul q w
y = add_any l x
ba = cos a
bb = mul z ba
bd = mul bb bc
bh = pow a bg
bi = mul bf bh
bj = safe_mul be bi
bk = mul bd bj
bl = sin a
bn = mul bl bm
bt = pow a bs
bu = mul br bt
bv = safe_mul bq bu
bw = mul bp bv
bx = safe_mul bo bw
by = mul bn bx
bz = add_any bk by
ca = add_any y bz
in ca }
I thought reusing intermediate values was also an original motivation of our recursively-defined derivatives code, i.e.
def pushfwd(f, x, vs):
if vs:
v, vs = vs[0], vs[1:]
return jvp(lambda z: pushfwd(f, z, vs), (x,), (v,))[1]
else:
return f(x)
but it doesn't seem to help here.
 mattjj
on 21 Mar 2019
mattjj
on 21 Mar 2019
I forgot to add: I don't know the answer, but let's try to figure it out!
mattjj
on 21 Mar 2019
Some more info on the nature of the blowup, following on from that last script:
from collections import Counter
counts = Counter(eqn.primitive.name for eqn in jaxpr.eqns)
print(counts.most_common())
[('mul', 224),
('safe_mul', 80),
('pow', 32),
('neg', 32),
('add_any', 31),
('cos', 16),
('sin', 16)]
Now with more plotting!
from jax import jvp, make_jaxpr
import jax.numpy as np
from collections import Counter, defaultdict
import matplotlib.pyplot as plt
def fwd_deriv(f):
def df(x):
return jvp(f, (x,), (1.0,))[1]
return df
def f(t):
return 0.3 * np.sin(t) * t**10
dmax = 8
g = f
primitive_counts = defaultdict(list)
for i in range(dmax):
g = fwd_deriv(g)
print(g(1.1))
jaxpr = make_jaxpr(g)(1.1)
c = Counter(eqn.primitive.name for eqn in jaxpr.eqns)
for name, count in c.most_common():
primitive_counts[name].append(count)
fig, ax = plt.subplots()
for name, counts in primitive_counts.items():
counts = [0] * (dmax - len(counts)) + counts
ax.plot(counts, label=name)
ax.legend()

So I suspect that everything may be exponential, but some things are more exponential than others.
mattjj
on 21 Mar 2019
We discussed this a bit in our chat. We think the answer is to add a CSE pass that happens after every level of differentiation. But we might also need some other simplifications, like collecting terms x + x + x = 3x.
CSE is easy enough to add. We'll try it out and report back!
mattjj
on 21 Mar 2019
Wow, thanks for looking into this so quickly!
duvenaud
on 21 Mar 2019
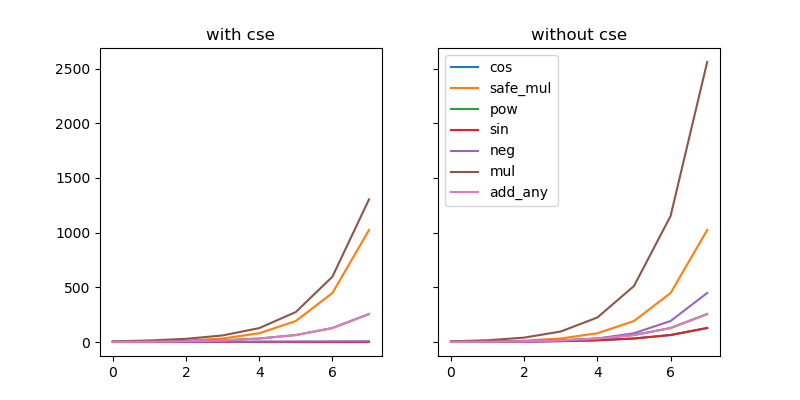
In fb22275 over on the jaxch-cse branch I just pushed, @dougalm and @axch and I sketched out a really basic CSE based on simply memoizing Primitive.bind.
Currently the notion of equality is too specific and so we're not getting enough cache hits. In particular, while we've crushed sin/cos/neg down to be constant (instead of exponential), we're generating too many muls and adds:
from collections import Counter, defaultdict
import matplotlib.pyplot as plt
import jax.numpy as np
from jax import jvp, make_jaxpr
from jax import core
def fwd_deriv(f):
def df(x):
return jvp(f, (x,), (1.0,))[1]
return df
def f(t):
return 0.3 * np.sin(t) * t**10
dmax = 8
fig, [ax1, ax2] = plt.subplots(1, 2, sharey=True, sharex=True, figsize=(8, 4))
for enable_cse, ax in [(True, ax1), (False, ax2)]:
core.enable_cse = enable_cse
primitive_counts = defaultdict(list)
g = f
for i in range(dmax):
g = fwd_deriv(g)
print(g(1.1))
jaxpr = make_jaxpr(g)(1.1)
print(len(jaxpr.eqns))
c = Counter(eqn.primitive.name for eqn in jaxpr.eqns)
for name, count in c.most_common():
primitive_counts[name].append(count)
for name, counts in primitive_counts.items():
counts = [0] * (dmax - len(counts)) + counts
ax.plot(counts, label=name)
ax.set_title("{} cse".format("with" if enable_cse else "without"))
ax.legend()
fig.savefig('hi.png')
(There could be an issue in how I'm doing this count: forming a jaxpr could itself be foiling this simple CSE, and so I should switch to counting hits/misses directly on the cache without using make_jaxpr at all.)
There may be simple things we can do to improve the value equality testing. Or we might need to add invariance to commutation and maybe even association (which we know how to do).
The good news is that all the tests pass. It's easy to make memoization sound!
We're split on whether we should just push forward this simple "memoize bind" model of CSE, or whether we should add an explicit tracer/final-style transformation for it. Not sure yet what the tradeoffs are. The latter involves more boilerplate, more runtime overhead, and doesn't automatically cover the whole system, but may be easier to reason about and offer more control.
By the way, an alternative to doing CSE is "Taylor series propagation", which we could also implement in JAX. That would basically mean making a new Tracer that is kind of like JVPTracer, except instead of modeling values of the form a + b * eps, the tracer payload would model values of the form a + b * eps + c * eps^2, or more generally any order. So we'd have a TaylorSeriesTracer(order=N), and JVPTracer = TaylorSeriesTracer(order=1). The fundamental issue that would tackle is (borrowing from an @axch explanation) that currently jvp(jvp(f)) evaluates f on ((a + a1 * eps) + (a1 + a11 * eps) * eps), meaning we have 4 terms where really we should have 3 because the two instances of a1 can be collected. That means jvp**5 takes 32 terms where we only really need 6.
But ultimately implementing that is just going to be a limited form of CSE: basically when we evaluate each primitive we'll do some CSE to collect those 32 terms down to 6 (for the case of jvp**5). If we're going to implement CSE anyway, we should just do it properly on a way that extends to everything in the system. Moreover, just implementing a TaylorSeriesTracer leaves open the hardest part: how you merge together lower-order TaylorSeriesTracers that arose from separately kicked-off jvp transformations.
So to summarize, as far as I currently know, Taylor series propagation is only useful if your system can't implement a good CSE that can be interleaved with AD passes. And it opens up issues that may be harder to solve than general CSE. We think JAX can do better!
mattjj
on 22 Mar 2019
(I'm juggling some SPMD stuff right now, and @dougalm is working on differentiable scan, so we haven't spent much time on this so far, but we'll come back to it as we can!)
mattjj
on 22 Mar 2019
Not directly related, but check out the jarrett-jvps branch jarrett-jvps-2 branch where we just sketched out an implementation of this optimization.
Here's the punchline:
from jax import jarrett, vjp, make_jaxpr
import jax.numpy as np
def f(x):
return np.sin(np.sin(np.sin(x)))
f2 = jarrett(f)
print f(3)
print f2(3)
print
_, f_vjp = vjp(f, 3.)
_, f2_vjp = vjp(f2, 3.)
print f_vjp(1.)
print f2_vjp(1.)
print
print make_jaxpr(f_vjp)(1.)
print make_jaxpr(f2_vjp)(1.)
0.14018878
0.14018878
(array(-0.9704719, dtype=float32),)
(array(-0.9704719, dtype=float32),)
{ lambda e i g ; ; a.
let b = pack * a
(c d) = id b
f = mul d e
h = mul f g
j = mul h i
k = pack j
(l) = id k
m = pack l
in m }
{ lambda e ; ; a.
let b = pack * a
(c d) = id b
f = mul d e
g = pack f
(h) = id g
i = pack h
in i }
For a chain of elementwise unary ops, we only have to store one linearization point, regardless of the depth of the chain. That means if you have a network with gelu activations, as in
def gelu(x):
return 0.5*x*(1+np.tanh(np.sqrt(2/np.pi)*(x+0.044715 * lax.pow(x, 3))))
in reverse-mode you only store one activations-sized constant per layer (as opposed to one per nonlinear op in the activation function).
EDIT: though gelu has binary operations too, and so far that PR only does things to unary operations.
EDIT 2: Actually the version in jarrett-jvps-2 is much better! It handles arbitrary arity in many fewer lines of code, with user control of the tradeoffs. I updated the above text. See also #525.
mattjj
on 23 Mar 2019
Some progress over here: https://github.com/google/jax/compare/cse
EDIT: updated numbers
from collections import Counter
def deriv(f):
return lambda x: jvp(f, (x,), (1.,))[1]
def f(x):
return 0.3 * np.sin(x) * x ** 10
g = f
for i in range(8):
jaxpr = make_jaxpr(g)(3.)
print(g(3.), Counter(eqn.primitive for eqn in jaxpr.eqns).most_common())
g = deriv(g)
Without CSE (i.e. on master):
(array(2499.8987, dtype=float32), [(mul, 2), (sin, 1), (pow, 1)])
(array(-9204.425, dtype=float32), [(mul, 6), (pow, 2), (add_any, 1), (cos, 1), (safe_mul, 1), (sin, 1)])
(array(-94417.05, dtype=float32), [(mul, 16), (safe_mul, 4), (pow, 4), (add_any, 3), (cos, 2), (sin, 2), (neg, 1)])
(array(-466920.22, dtype=float32), [(mul, 40), (safe_mul, 12), (pow, 8), (add_any, 7), (cos, 4), (neg, 4), (sin, 4)])
(array(-1628770.6, dtype=float32), [(mul, 96), (safe_mul, 32), (pow, 16), (add_any, 15), (neg, 12), (cos, 8), (sin, 8)])
(array(-4033757.8, dtype=float32), [(mul, 224), (safe_mul, 80), (pow, 32), (neg, 32), (add_any, 31), (cos, 16), (sin, 16)])
(array(-5534321.5, dtype=float32), [(mul, 512), (safe_mul, 192), (neg, 80), (pow, 64), (add_any, 63), (cos, 32), (sin, 32)])
(array(5498716., dtype=float32), [(mul, 1152), (safe_mul, 448), (neg, 192), (pow, 128), (add_any, 127), (cos, 64), (sin, 64)])
With CSE (i.e. on that branch):
(array(2499.8987, dtype=float32), [(mul, 2), (sin, 1), (pow, 1)])
(array(-9204.425, dtype=float32), [(mul, 6), (pow, 2), (add_any, 1), (cos, 1), (safe_mul, 1), (sin, 1)])
(array(-94417.05, dtype=float32), [(mul, 14), (safe_mul, 4), (pow, 4), (add_any, 3), (cos, 1), (neg, 1), (sin, 1)])
(array(-466920.22, dtype=float32), [(mul, 29), (safe_mul, 12), (pow, 8), (add_any, 7), (neg, 2), (cos, 1), (sin, 1)])
(array(-1628770.6, dtype=float32), [(mul, 60), (safe_mul, 32), (pow, 16), (add_any, 15), (neg, 3), (cos, 1), (sin, 1)])
(array(-4033757.8, dtype=float32), [(mul, 127), (safe_mul, 80), (pow, 32), (add_any, 31), (neg, 4), (cos, 1), (sin, 1)])
(array(-5534321.5, dtype=float32), [(mul, 274), (safe_mul, 192), (pow, 64), (add_any, 63), (neg, 5), (cos, 1), (sin, 1)])
(array(5498716., dtype=float32), [(mul, 597), (safe_mul, 448), (pow, 128), (add_any, 127), (neg, 6), (cos, 1), (sin, 1)])
Might be doing something dumb with that pack/unpack stuff. Also I should add this is only lightly tested so might not actually be correct yet :) I was using both primal and tangent outputs of jvp instead, i.e. my fwd_deriv function wasn't doing what we wanted.
That branch is using an explicit cse JAX-style transformation, rather than memoizing all bind calls. Still exploring which strategy is better. But this one is the first that let us make it robust to associativity and commutativity of addition (and, currently, multiplication as well).
mattjj
on 25 Mar 2019
I've been saying "CSE" when I mean "CSE with algebraic simplifications". It's actually the simplifications that are the most important. The implementation so far handles commutativity and associativity of add and mul separately, but the most important thing for higher-order autodiff is handling them together with distributivity (i.e. a ring). Working on that with @dougalm now! We might end up separating a cse from an algsimp, not sure.
mattjj
on 25 Mar 2019
By the way, this works on the cse branch right now, but I haven't had time to touch it since the weekend:
def f(x):
return 0.3 * np.sin(x) * x ** 10
def deriv(f, x, t):
return jvp(f, (x,), (t,))[1]
def poly(t):
df = lambda x: deriv(f, x, t)
ddf = lambda x: deriv(df, x, t)
dddf = lambda x: deriv(ddf, x, t)
ddddf = lambda x: deriv(dddf, x, t)
return ddddf(2.)
print make_jaxpr(poly)(1.)
print make_jaxpr(polysimp.polysimp(lu.wrap_init(poly)).call_wrapped)((1.,))
{ lambda i hf gk cw dj fs ev di x eb cs hg bl r ca bc gs cz ge dz gj ex du b el be er gi fj gg cl fd ei k hh cc hj fw fz ey m bh gw bv ee hi gx cf gu gy cy cj fy fh bo de dk cm ff t fi ek bn dg ; ; a.
let c = mul a b
d = neg c
e = mul a d
f = mul a e
g = neg f
h = mul a g
j = mul h i
l = mul j k
n = mul a m
o = mul a n
p = neg o
q = mul a p
s = mul q r
u = safe_mul a t
v = mul s u
w = add_any l v
y = mul a x
z = mul a y
ba = neg z
bb = mul a ba
bd = mul bb bc
bf = safe_mul a be
bg = mul bd bf
bi = mul a bh
bj = neg bi
bk = mul a bj
bm = mul bk bl
bp = safe_mul a bo
bq = mul bn bp
br = safe_mul a bq
bs = mul bm br
bt = add_any bg bs
bu = add_any w bt
bw = mul a bv
bx = mul a bw
by = neg bx
bz = mul a by
cb = mul bz ca
cd = safe_mul a cc
ce = mul cb cd
cg = mul a cf
ch = neg cg
ci = mul a ch
ck = mul ci cj
cn = safe_mul a cm
co = mul cl cn
cp = safe_mul a co
cq = mul ck cp
cr = add_any ce cq
ct = mul a cs
cu = neg ct
cv = mul a cu
cx = mul cv cw
da = safe_mul a cz
db = mul cy da
dc = safe_mul a db
dd = mul cx dc
df = mul a de
dh = mul df dg
dl = safe_mul a dk
dm = mul dj dl
dn = safe_mul a dm
do = mul di dn
dp = safe_mul a do
dq = mul dh dp
dr = add_any dd dq
ds = add_any cr dr
dt = add_any bu ds
dv = mul a du
dw = mul a dv
dx = neg dw
dy = mul a dx
ea = mul dy dz
ec = safe_mul a eb
ed = mul ea ec
ef = mul a ee
eg = neg ef
eh = mul a eg
ej = mul eh ei
em = safe_mul a el
en = mul ek em
eo = safe_mul a en
ep = mul ej eo
eq = add_any ed ep
es = mul a er
et = neg es
eu = mul a et
ew = mul eu ev
ez = safe_mul a ey
fa = mul ex ez
fb = safe_mul a fa
fc = mul ew fb
fe = mul a fd
fg = mul fe ff
fk = safe_mul a fj
fl = mul fi fk
fm = safe_mul a fl
fn = mul fh fm
fo = safe_mul a fn
fp = mul fg fo
fq = add_any fc fp
fr = add_any eq fq
ft = mul a fs
fu = neg ft
fv = mul a fu
fx = mul fv fw
ga = safe_mul a fz
gb = mul fy ga
gc = safe_mul a gb
gd = mul fx gc
gf = mul a ge
gh = mul gf gg
gl = safe_mul a gk
gm = mul gj gl
gn = safe_mul a gm
go = mul gi gn
gp = safe_mul a go
gq = mul gh gp
gr = add_any gd gq
gt = mul a gs
gv = mul gt gu
gz = safe_mul a gy
ha = mul gx gz
hb = safe_mul a ha
hc = mul gw hb
hd = safe_mul a hc
he = mul gv hd
hk = safe_mul a hj
hl = mul hi hk
hm = safe_mul a hl
hn = mul hh hm
ho = safe_mul a hn
hp = mul hg ho
hq = safe_mul a hp
hr = mul hf hq
hs = add_any he hr
ht = add_any gr hs
hu = add_any fr ht
hv = add_any dt hu
in hv }
{ lambda b ; ; a.
let (c) = id a
d = mul b c
e = mul d c
f = mul e c
g = mul f c
in g }
We need to do that polynomial simplification on the tangents (that buys us everything that Taylor propagation does), plus it's probably a good idea to do CSE on the primals (to solve the "cosine problem").
Will update more when I can get back to this :)
mattjj
on 4 Apr 2019
Whoa, that's encouraging! Barak Pearlmutter would be impressed. I'm gaining hope that this might be ready in time for thus year's NIPS push.
duvenaud
on 4 Apr 2019
Remind me, when's the NIPS push? I think we can make it happen, though since us JAX folx are juggling a lot of competing priorities, it's good to have a sense for the urgency of things we want to achieve. (For example, I haven't picked this back up since my last comment.)
mattjj
on 10 Apr 2019
The submission deadline is May 23rd, so I'm already a little pessimistic, but if we don't have custom VJPs (to let us finish porting over neural ODEs) then it's a bit of a moot point anyways. However, I'm encouraged by the jax_taylor.py demo!
duvenaud
on 14 Apr 2019
Not to hi-jack the thread, but I have a very similar use case except its reversed: vector inputs and scalar output. So presumably an efficient way of doing jacfwd for your case can be somewhat easily ported over to an efficient jacrev for my use-case.
Just adding a +1 to show that I'm also interested in a solution to this (at least up to second order).
 proteneer
on 14 Apr 2019
proteneer
on 14 Apr 2019
Woo, we fixed this in #2363 ! Wow, that took some real effort :)
mattjj
on 18 Mar 2020
This was definitely a bit of a rabbit hole we stumbled into!
 jessebett
on 18 Mar 2020
jessebett
on 18 Mar 2020
Related issues
 sussillo
·
3Comments
sussillo
·
3Comments
 madvn
·
3Comments
madvn
·
3Comments
 yfji
·
3Comments
yfji
·
3Comments
 alexbw
·
3Comments
alexbw
·
3Comments
 clemisch
·
3Comments
clemisch
·
3Comments
Most helpful comment
This was definitely a bit of a rabbit hole we stumbled into!