Hello All! Been having some strange behavior on 5"quad in NAV WP mode regarding altitude flyaway.
Current Behavior
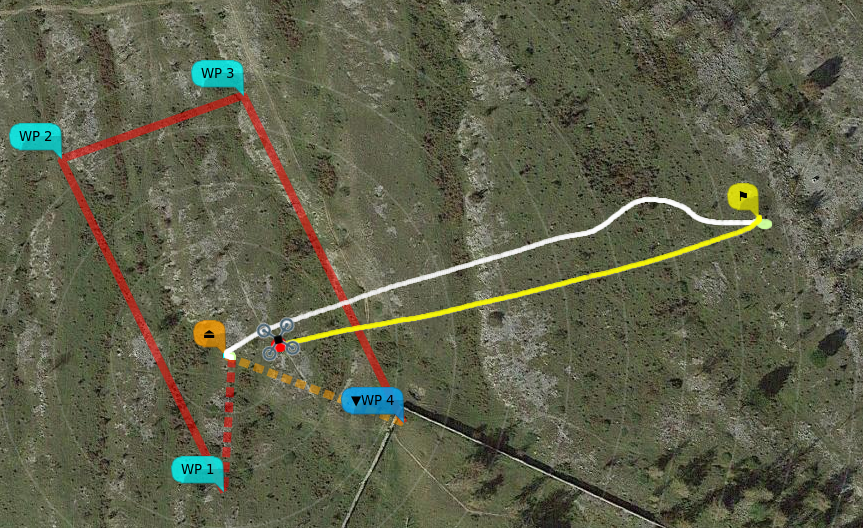
Created Survey Pattern in http://www.iforce2d.net/surveyplanner/ and uploaded to FC via Mission Control and sanity checked WP altitudes (100m = 10000cm).
FLIGHT SEQUENCE: ARM, takeoff, into NAV POS HOLD then NAV WP. Upon selection of NAV WP mode high rate of climb noted as expected, but didn't stop climbing at target altitude. It kept climbing. It rather caught me off guard as I had misread the OSD altitude.
Selected RTH and with the slow descent rates I had selected ran out of battery before controlled landing.
Blackbox log...
https://www.dropbox.com/s/a2uzpsagiy8ffin/LOG00002.TXT?dl=0
OBSERVATIONS:
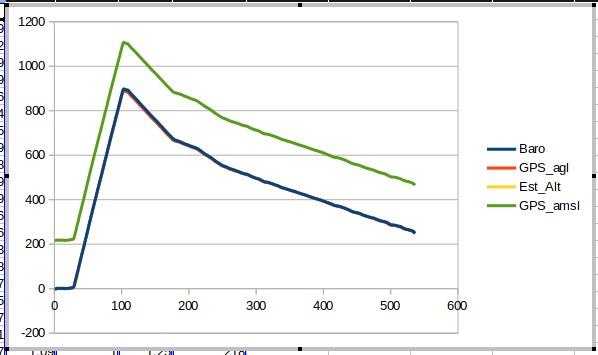
navTgtPos[2] remains constant in NAV WP mode at "5.73m" irrespective of BARO and navPos[2] reading accurately and considerably higher.
navTgtVel[2] also remains constant in NAV WP mode at a very leisurely "0.43m/s" although the actual rate of climb was "11.83m/s" (navVel[2]).
Expected behavior
I'd expected a climb to 100m and Survey execution in NAV WP
Any ideas from you lovely people?
INAV/MATEKF405 2.5.1 Jun 16 2020 / 12:41:44 (098a574b3)
GCC-9.2.1 20191025 (release) [ARM/arm-9-branch revision 277599]
 MartianLocust
MartianLocust
All 10 comments
Issue-Label Bot is automatically applying the label BUG to this issue, with a confidence of 0.84. Please mark this comment with :thumbsup: or :thumbsdown: to give our bot feedback!
Links: app homepage, dashboard and code for this bot.
![issue-label-bot[bot] picture](https://avatars2.githubusercontent.com/in/27079?v=4&s=40) issue-label-bot[bot]
on 30 Jul 2020
issue-label-bot[bot]
on 30 Jul 2020
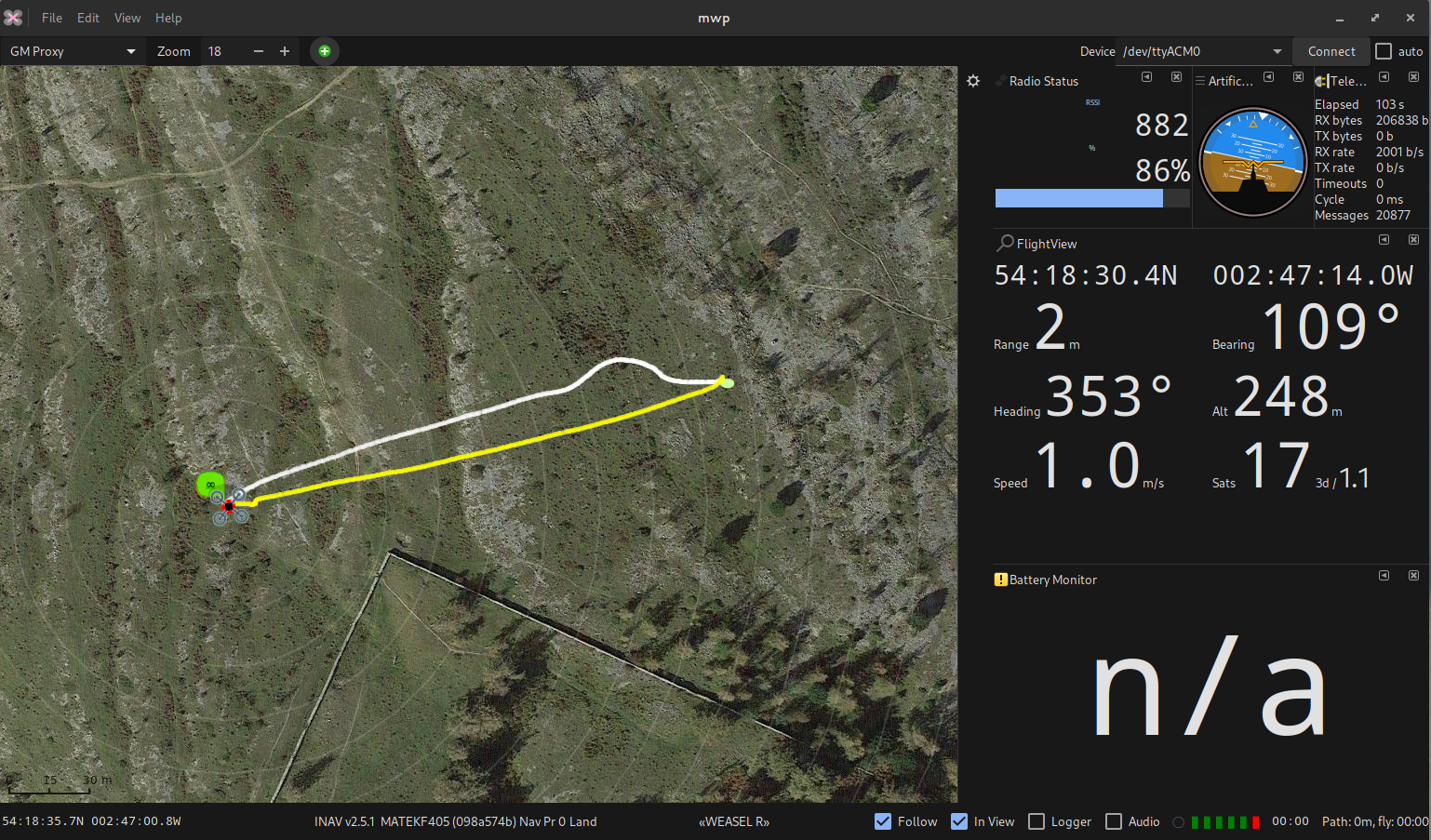
There is no WP mission loaded into volatile RAM; the BBL shows:
H waypoints:0,0
It seems like the craft is drifting and climbing at constant rate until PH then RTH is engaged. After the RTH, the craft reverts to PosHold before being put back into RTH/Land.
$ inav_modes.rb ~/dl/LOG00002.TXT
2.5.1 using states for 2.5.0
LOG00002.TXT: INAV 2.5.1 (098a574b3) MATEKF405
Iteration Time(s) Elapsed(s) State
0 250.8 ( 0.0) nav_state_undefined (0)
7840 254.8 ( 4.0) nav_state_poshold_3d_in_progress (7)
55936 279.4 ( 28.7) nav_state_idle (1)
199200 352.6 ( 101.9) nav_state_poshold_3d_in_progress (7)
210240 358.3 ( 107.5) nav_state_rth_head_home (10)
342503 426.1 ( 175.4) nav_state_rth_hover_prior_to_landing (11)
345443 427.6 ( 176.9) nav_state_rth_landing (12)
414784 463.2 ( 212.4) nav_state_poshold_3d_in_progress (7)
486912 500.2 ( 249.4) nav_state_rth_landing (12)
1047088 787.4 ( 536.7) end of log
 stronnag
on 30 Jul 2020
stronnag
on 30 Jul 2020
No mission loaded in the run-time flight plan. Maybe we should fallback to RTH or PR if WP is activated without a mission?
 digitalentity
on 30 Jul 2020
digitalentity
on 30 Jul 2020
I agree that the behaviour is non-intuitive. Falling back to RTH would be consistent with current WP list initialisation and the traditional advice for clearing out a WP list.
stronnag
on 30 Jul 2020
Awesome work @stronnag !
Going into the FC now I can load the Mission from EEPROM...
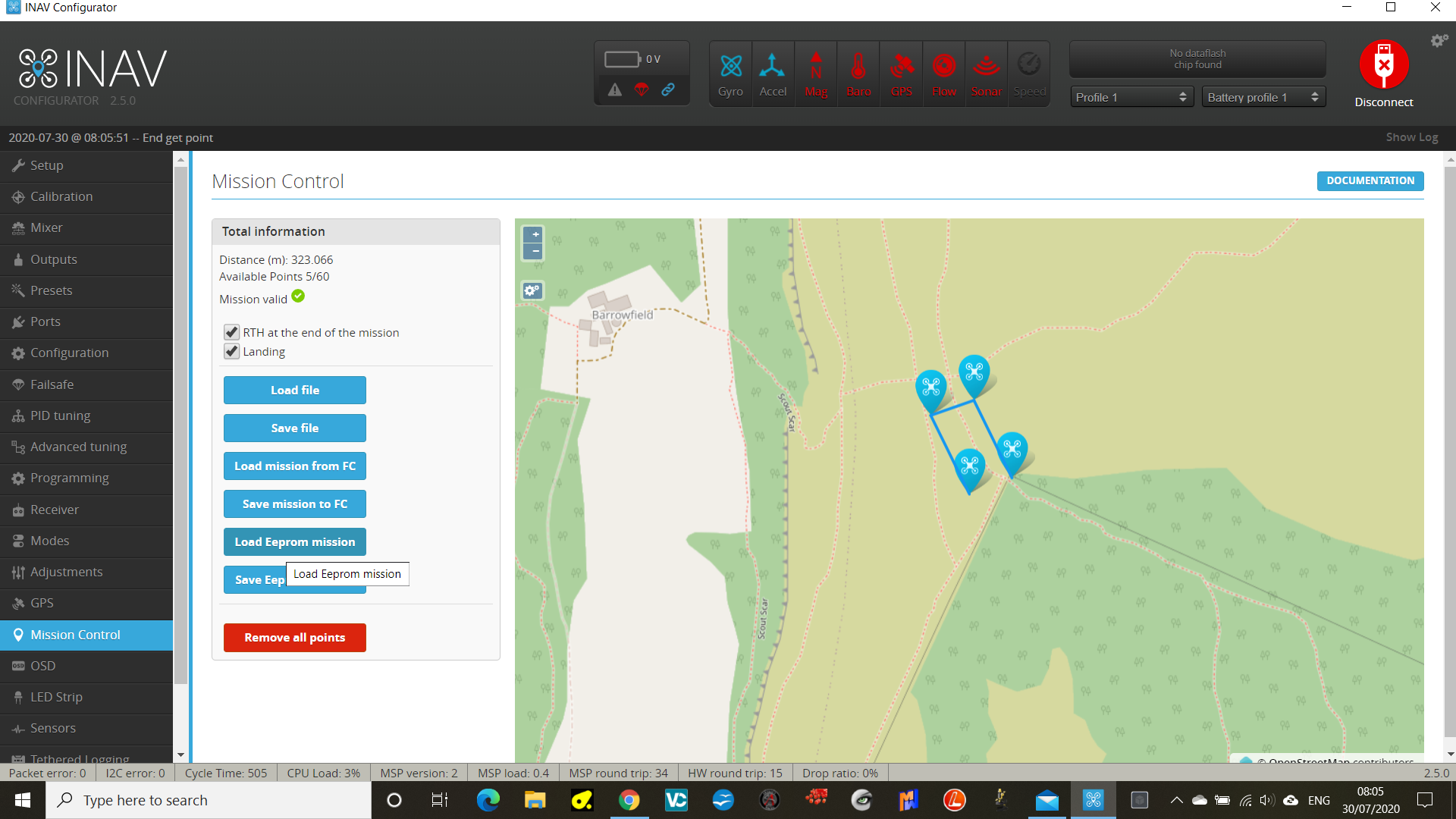
This is the Mission I just retrieved off the FC.. https://www.dropbox.com/s/9716jg9qiu2ftg3/WP%20retrieve%20from%20FC.mission?dl=0
So what did I get wrong to not get the WPs to load?
Many most awesome thanks!!!!
MartianLocust
on 30 Jul 2020
In order to execute the WP must be in RAM (not EEPROM). You can either use a software (Configurator, mwp, DroneHelper, ezgui etc.) or a stick command (prior to arming). If you have a buzzer, it will beep twice when the mission is loaded from EEPROM to RAM. See https://github.com/iNavFlight/inav/blob/master/docs/Controls.md
stronnag
on 30 Jul 2020
AH! Always learning. Thanks you @stronnag !
Here is an NDVI image from the appogee....
Cheers!
MartianLocust
on 30 Jul 2020
This is the Mission I just retrieved off the FC.. https://www.dropbox.com/s/9716jg9qiu2ftg3/WP%20retrieve%20from%20FC.mission?dl=0
So what did I get wrong to not get the WPs to load?
Many most awesome thanks!!!!
Having the mission file is always helpful in triaging WP questions, you can now see the craft is just drifting (until RTH, which is well behaved).
stronnag
on 30 Jul 2020
Case closed! Thanks @stronnag @digitalentity .
MartianLocust
on 30 Jul 2020
@MartianLocust @stronnag PTAL at #5997
digitalentity
on 30 Jul 2020
Related issues
 Key0nee
·
4Comments
Key0nee
·
4Comments
 hrrr
·
4Comments
hrrr
·
4Comments
 dankvwguy
·
4Comments
dankvwguy
·
4Comments
 ratmole
·
4Comments
ratmole
·
4Comments
 bstanton89
·
3Comments
bstanton89
·
3Comments