Drake: Add a generalized acceleration port to MultibodyPlant
What is the reason, that MultibodyPlant does not give access to the generalized accelerations?
 felixcra
felixcra
All 15 comments
@felixcra do you mean why isn't there an output port for the accelerations? You can get the generalized accelerations for a continuous MultibodyPlant by calling EvalTimeDerivatives().
The reason there isn't an output port is that no one has requested one yet. Joint reaction forces are related and were requested recently so PR #12123 added the port. In the process of doing that, generalized accelerations were cached via #12050. However, no port has been added to expose them. Are you requesting that?
 sherm1
on 13 Oct 2019
sherm1
on 13 Oct 2019
@sherm1 Yes thats what I meant. Indeed it would be useful for my usecase if MultibodyPlant had an output port for the accelerations.
felixcra
on 13 Oct 2019
OK, added to our work queue @felixcra.
sherm1
on 14 Oct 2019
Hi @felixcra,
There are actually a number of ways to do this in the meantime.
I think the simplest would be to hook up a DiscreteDerivative to the state output of MultibodyPlant (get_state_output_port()). If you're using the discrete version of MBP (i.e., you constructed it using MultibodyPlant(h) with h > 0), you'd construct the DiscreteDerivative using the same h. Then the velocity variables in the output of the DiscreteDerivative would correspond to the generalized accelerations. If you're indeed using the discrete MBP, you'll get exactly the generalized acceleration.
FYI, I haven't tried this and the output might be time delayed by h.
 edrumwri
on 15 Oct 2019
edrumwri
on 15 Oct 2019
Hi @edrumwri
Thanks a lot for getting back to me!
I managed to work around this by adding an output port to the MultibodyPlant class.
Offtopic: I have some questions that are neither issues with the software itself, nor well suited for Stackoverflow, but rather about recommendations about how the software is intended to be used for certain things. Where would be a good place to ask these? Is there like a mailing list or so?
felixcra
on 18 Oct 2019
@felixcra:
- the
#onrampchannel of drakedevelopers.slack.com might be a good place to start - stackoverflow could also be ok for general advice
- any interest in submitting a pull request to add the acceleration output port to MultibodyPlant in Drake?
sherm1
on 18 Oct 2019
BTW when adding the generalized acceleration port, also add one that reports body spatial accelerations.
sherm1
on 12 Nov 2019
I'm working on adding MBP acceleration output ports.
Question regarding model instance ports: on the input side we provide an actuator port for every model instance, regardless of whether it actually has any actuators. But on the output side we do not create output ports for model instances that have no state. Here is the current port diagram -- the ports in orange are conditional on non-zero-length data while the ones in black are not:
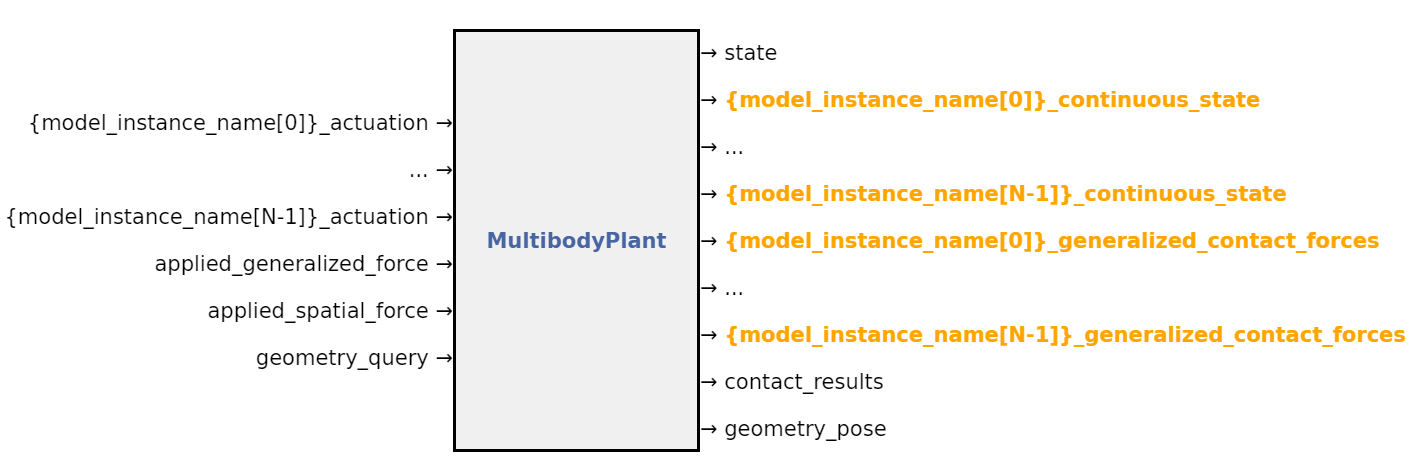
Does anyone remember why we handle model instance ports differently in input and output? It would be easier to code and document if we produce a port per model instance consistently for input and output, even if the corresponding data has zero length. The ports don't cost anything if no one uses them.
cc @edrumwri @RussTedrake @amcastro-tri @rcory @EricCousineau-TRI @jwnimmer-tri
sherm1
on 13 Nov 2019
I have absolutely no idea why it was set up that way (and I didn't realize it was, even though I've operated in that code base).
edrumwri
on 13 Nov 2019
I see that the input port side was changed to generate ports for all model instances (by @edrumwri in PR #10738 in response to issue #10694 due to problem encountered by @mposa).
My proposal would be to do the same for the output ports.
sherm1
on 13 Nov 2019
I'd be on board with that - sounds much simpler.
 EricCousineau-TRI
on 13 Nov 2019
EricCousineau-TRI
on 13 Nov 2019
Me too. Thanks for reminding me that I instituted this change to actuator ports @sherm1!
edrumwri
on 13 Nov 2019
My proposal would be to do the same for the output ports.
I like that.
 amcastro-tri
on 14 Nov 2019
amcastro-tri
on 14 Nov 2019
Sorry for not getting back to this questions. I added a pull-request with the code I used in order to acces the generalized accelerations #12353. It's only for continuous time accelerations though.
felixcra
on 15 Nov 2019
See PR #12354 for a more ambitious version.
sherm1
on 15 Nov 2019
Related issues
sherm1
·
5Comments
 RussTedrake
·
4Comments
EricCousineau-TRI
·
5Comments
RussTedrake
·
4Comments
EricCousineau-TRI
·
5Comments
 jamiesnape
·
5Comments
amcastro-tri
·
5Comments
jamiesnape
·
5Comments
amcastro-tri
·
5Comments
Most helpful comment
I see that the input port side was changed to generate ports for all model instances (by @edrumwri in PR #10738 in response to issue #10694 due to problem encountered by @mposa).
My proposal would be to do the same for the output ports.