Darknet: loading weights from a different model
hello,
when i try to execute the script for tracking , the system loads the weight file for one old model the system was trained for, and for which i ran tracking. despite carefully checking the paths, as input these weights are provided
Backup1/yolov2_3700.weights
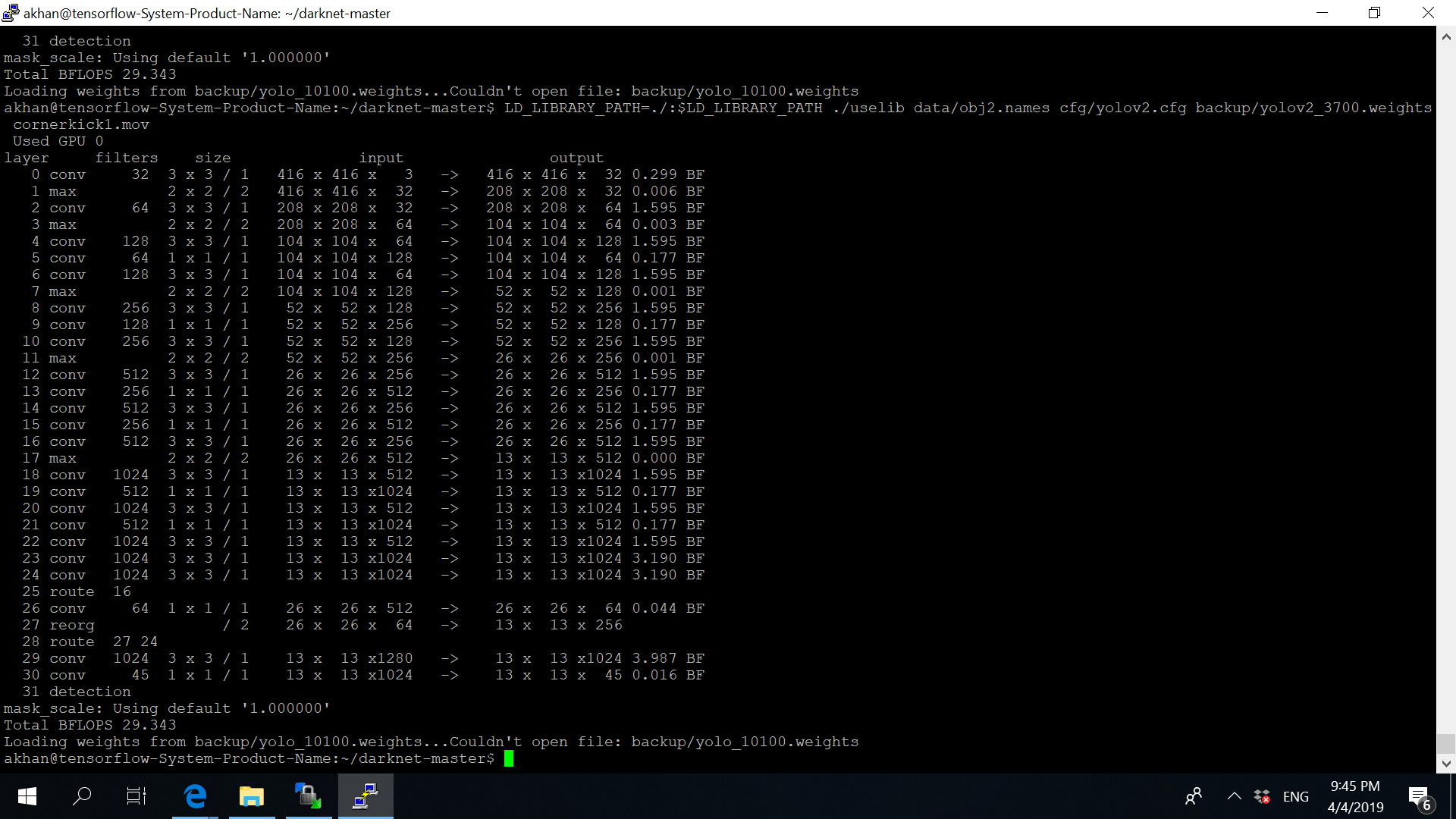
after running the scipt it loads these weights below for old model.
Loading weights from backup/yolo_10100.weights...
LD_LIBRARY_PATH=./:$LD_LIBRARY_PATH ./uselib data/obj2.names cfg/yolov2.cfg Backup1/yolov2_3700.weights experi.jpg
Used GPU 0
layer filters size input output
0 conv 32 3 x 3 / 1 416 x 416 x 3 -> 416 x 416 x 32 0.299 BF
1 max 2 x 2 / 2 416 x 416 x 32 -> 208 x 208 x 32 0.006 BF
2 conv 64 3 x 3 / 1 208 x 208 x 32 -> 208 x 208 x 64 1.595 BF
3 max 2 x 2 / 2 208 x 208 x 64 -> 104 x 104 x 64 0.003 BF
4 conv 128 3 x 3 / 1 104 x 104 x 64 -> 104 x 104 x 128 1.595 BF
5 conv 64 1 x 1 / 1 104 x 104 x 128 -> 104 x 104 x 64 0.177 BF
6 conv 128 3 x 3 / 1 104 x 104 x 64 -> 104 x 104 x 128 1.595 BF
7 max 2 x 2 / 2 104 x 104 x 128 -> 52 x 52 x 128 0.001 BF
8 conv 256 3 x 3 / 1 52 x 52 x 128 -> 52 x 52 x 256 1.595 BF
9 conv 128 1 x 1 / 1 52 x 52 x 256 -> 52 x 52 x 128 0.177 BF
10 conv 256 3 x 3 / 1 52 x 52 x 128 -> 52 x 52 x 256 1.595 BF
11 max 2 x 2 / 2 52 x 52 x 256 -> 26 x 26 x 256 0.001 BF
12 conv 512 3 x 3 / 1 26 x 26 x 256 -> 26 x 26 x 512 1.595 BF
13 conv 256 1 x 1 / 1 26 x 26 x 512 -> 26 x 26 x 256 0.177 BF
14 conv 512 3 x 3 / 1 26 x 26 x 256 -> 26 x 26 x 512 1.595 BF
15 conv 256 1 x 1 / 1 26 x 26 x 512 -> 26 x 26 x 256 0.177 BF
16 conv 512 3 x 3 / 1 26 x 26 x 256 -> 26 x 26 x 512 1.595 BF
17 max 2 x 2 / 2 26 x 26 x 512 -> 13 x 13 x 512 0.000 BF
18 conv 1024 3 x 3 / 1 13 x 13 x 512 -> 13 x 13 x1024 1.595 BF
19 conv 512 1 x 1 / 1 13 x 13 x1024 -> 13 x 13 x 512 0.177 BF
20 conv 1024 3 x 3 / 1 13 x 13 x 512 -> 13 x 13 x1024 1.595 BF
21 conv 512 1 x 1 / 1 13 x 13 x1024 -> 13 x 13 x 512 0.177 BF
22 conv 1024 3 x 3 / 1 13 x 13 x 512 -> 13 x 13 x1024 1.595 BF
23 conv 1024 3 x 3 / 1 13 x 13 x1024 -> 13 x 13 x1024 3.190 BF
24 conv 1024 3 x 3 / 1 13 x 13 x1024 -> 13 x 13 x1024 3.190 BF
25 route 16
26 conv 64 1 x 1 / 1 26 x 26 x 512 -> 26 x 26 x 64 0.044 BF
27 reorg / 2 26 x 26 x 64 -> 13 x 13 x 256
28 route 27 24
29 conv 1024 3 x 3 / 1 13 x 13 x1280 -> 13 x 13 x1024 3.987 BF
30 conv 45 1 x 1 / 1 13 x 13 x1024 -> 13 x 13 x 45 0.016 BF
31 detection
mask_scale: Using default '1.000000'
Total BFLOPS 29.343
Loading weights from backup/yolo_10100.weights...
seen 64
Done!
input image or video filename: Time: 0.200338 sec
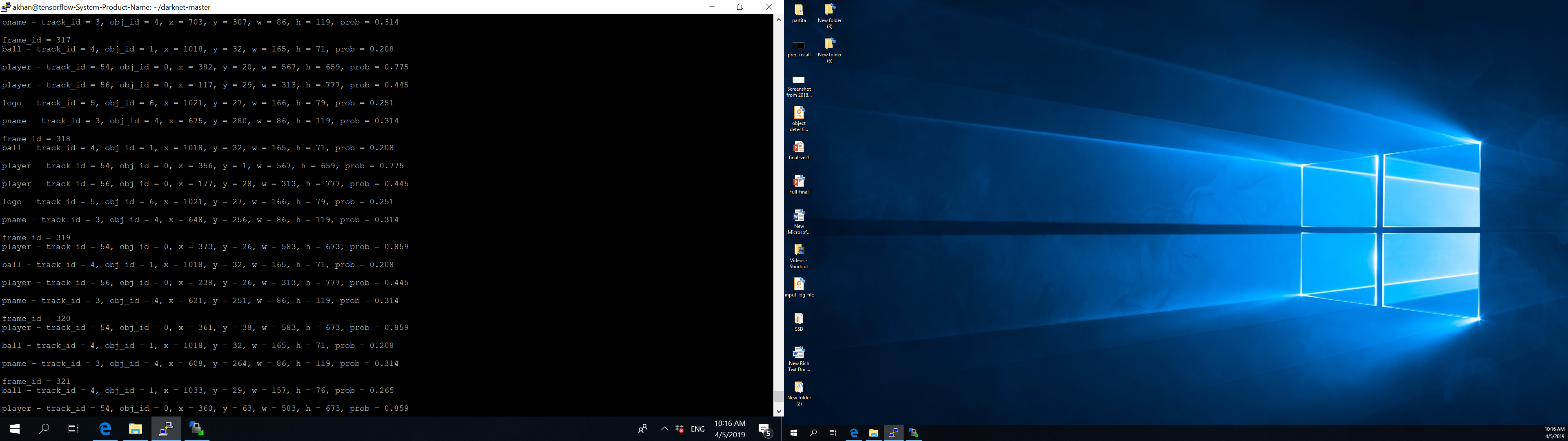
Hence resulting in inaccurate tracking.
frame_id = 184
track_id = 441, obj_id = 3, x = 57, y = 235, w = 6, h = 143, prob = 0.316
track_id = 446, obj_id = 3, x = 244, y = 103, w = 3, h = 268, prob = 0.273
track_id = 276, obj_id = 3, x = 51, y = 116, w = 0, h = 156, prob = 0.254
track_id = 297, obj_id = 3, x = 55, y = 333, w = 0, h = 167, prob = 0.254
track_id = 443, obj_id = 3, x = 251, y = 174, w = 67, h = 149, prob = 0.253
track_id = 540, obj_id = 3, x = 244, y = 9, w = 0, h = 245, prob = 0.252
track_id = 263, obj_id = 1, x = 251, y = 301, w = 0, h = 120, prob = 0.262
track_id = 409, obj_id = 3, x = 154, y = 356, w = 0, h = 119, prob = 0.247
track_id = 270, obj_id = 1, x = 152, y = 172, w = 0, h = 250, prob = 0.285
track_id = 277, obj_id = 1, x = 156, y = 272, w = 0, h = 178, prob = 0.292
track_id = 535, obj_id = 3, x = 152, y = 69, w = 0, h = 250, prob = 0.227
track_id = 1503, obj_id = 0, x = 1168, y = 77, w = 167, h = 0, prob = 0.271
track_id = 542, obj_id = 3, x = 933, y = 32, w = 0, h = 208, prob = 0.221
track_id = 572, obj_id = 3, x = 464, y = 186, w = 175, h = 0, prob = 0.221
track_id = 95, obj_id = 3, x = 251, y = 57, w = 0, h = 282, prob = 0.217
track_id = 1516, obj_id = 0, x = 867, y = 131, w = 168, h = 0, prob = 0.314
track_id = 1509, obj_id = 0, x = 767, y = 131, w = 164, h = 0, prob = 0.295
track_id = 444, obj_id = 3, x = 48, y = 81, w = 0, h = 118, prob = 0.212
track_id = 1671, obj_id = 0, x = 760, y = 408, w = 73, h = 79, prob = 0.23
track_id = 543, obj_id = 3, x = 146, y = 38, w = 0, h = 212, prob = 0.211
track_id = 573, obj_id = 3, x = 245, y = 429, w = 0, h = 83, prob = 0.208
track_id = 1795, obj_id = 0, x = 48, y = 188, w = 224, h = 0, prob = 0.214
track_id = 1052, obj_id = 0, x = 1077, y = 635, w = 130, h = 35, prob = 0.415
track_id = 1733, obj_id = 0, x = 1042, y = 186, w = 187, h = 0, prob = 0.218
track_id = 266, obj_id = 2, x = 1039, y = 11, w = 0, h = 145, prob = 0.201
track_id = 278, obj_id = 1, x = 648, y = 233, w = 0, h = 135, prob = 0.278
 buzdarbalooch
buzdarbalooch
All 7 comments
@AlexeyAB sorry for disturbnce and multiple posts , actaully i am on certain deadlines, and i shall be really greatful, if you can give any suggestion regarding the issue. Like what can be possibly wrong.
if you notice for detection system works perfectly fine as i discussed, but as u aware we are not able to save detection result frame by frame. when it comes to tracking, it shows the issue above. This is the weight file i am saving in the folder , Backup1 folder Backup1/yolov2_3700.weights, But after executing the script system load weights from the folder backup which is for another datasset.
Loading weights from backup/yolo_10100.weights...
buzdarbalooch
on 4 Apr 2019
i just changed the names of folders above Backup1 with backup and ran the script. the system always looks for these weights. backup/yolo_10100.weights...
buzdarbalooch
on 4 Apr 2019
@AlexeyAB finally resolved the issue, now its working fine for tracking as i can successfully see the script running.
only issue was resolved with make again. and the errors while compiling make were resolved by this single line PATH=/usr/local/cuda/bin:$PATH make. It might be helpful for other.
now only issue is the system is not saving the result for tracking in the result.avi file, and bounding box coordinates in the result.txt file . If you see i can successfully execute the script.
buzdarbalooch
on 5 Apr 2019
Set there true instead of false https://github.com/AlexeyAB/darknet/blob/f19d1440cb85331f4d5ce40b3dccd4582c690687/src/yolo_console_dll.cpp#L288
Recompile make
And run:
LD_LIBRARY_PATH=./:$LD_LIBRARY_PATH ./uselib data/obj2.names cfg/yolov2.cfg Backup1/yolov2_3700.weights test.mp4 | tee -a result.txt
Then look at result.avi and result.txt files.
 AlexeyAB
on 5 Apr 2019
AlexeyAB
on 5 Apr 2019
Thanks alot @AlexeyAB . problem is resolved. Tough i am not getting very great tracking results. i might train the model from the scratch and then again re-try it. as currently i am just testing it after 3700 itertations. Just a curiousity, i was reading some of your comments here.
https://github.com/AlexeyAB/darknet/issues/2808
which is a better option to use (Optical flow or Kalman filtering ) as i have two use-case one is for car park where videos are made by normal mobile camera. Second is random soccer videos where for certain points in the video there is abrupt camera movement. Hence in most cases system(tracking) ends up producing multiple labelling of the same object, incorrect disappearence of objects) resulting in unclean data
buzdarbalooch
on 5 Apr 2019
Here a lot of parameters affect the choice. Just try one and the other on a specific model and video to choose (Optical flow or Kalman filtering ).
AlexeyAB
on 5 Apr 2019
Ok thanks alot. And every time we move from one model to another once compile with make
buzdarbalooch
on 5 Apr 2019
Related issues
 louisondumont
·
3Comments
louisondumont
·
3Comments
 off99555
·
3Comments
off99555
·
3Comments
 yongcong1415
·
3Comments
yongcong1415
·
3Comments
 HilmiK
·
3Comments
HilmiK
·
3Comments
 Greta-A
·
3Comments
Greta-A
·
3Comments