Courseplay: Mode 3 (ULW): Haltezeit
Hi, mein erster Issue hier. Erstmal großen Respekt vor eurer Arbeit, CP ist echt super geworden, und macht echt Spaß zu nutzen. Ne Doku wie für die Version 5, wo mal alle Einstellmöglichkeiten und use-cases gesammelt an einer Stelle zu finden sind, hätte mir die Einarbeitung sicher vereinfacht, aber irgendwann gehts auch ohne. Aber das nur am Rande ;)
Ich hätte einen Vorschlag für den Überladewagen:
Zur Zeit wartet dieser, wenn selbst nicht leer, am Wartepunkt in jedem Fall so lange bis ein befüllbarer Abfahrer an genau dieser Stelle bereitsteht. Ich fände es ganz hilfreich, wenn man dieses Warten auf die eingestellte Haltezeit beschränken könnte, so dass der ULW nach Ablauf dieser Zeit (oder zumindest per Kommando) zum nächsten Wegpunkt weiterfährt. Damit hätte man eine simple aber effektive Möglichkeit mittels mehrerer Wartepunkte vollautomatisch auf mehrere Trailer überzuladen.
Nützlich zB bei Abfahrgespannen aus Traktor mit zwei Anhängern, LKW mit Pritsche und Anhänger, Sattelauflieger mit mehreren Behältern (zB Wilson und Load King), ganz zu schweigen von Road Trains.
Wenn einem ein Überladepunkt ausreicht und man den ULW unbedingt an diesem einen so lange warten lassen will, bis wieder ein Trailer mit Aufnahmekapazität darunter steht, lässt man die Haltezeit einfach auf dem default-Wert '--'.
Wenn ich den Code richtig verstehe müsste dazu im Status WAITING_FOR_TRAILER ebenfalls die continueIfWaitTimeIsOver() aufgerufen werden, so dass er auch ohne Entladen aus dem Status raus kann.
 rohne83
rohne83
All 38 comments
Hmm keine so schlechte Idee....
Anders wäre es, wenn man einfach mehrere Farhzeuge mit Trailer im Mode1 fahrn lässt, welche dann unter den ÜLW fahren, sobald der vordere weg ist ?
Ich meine das es mal so gedacht war ;)
 Tensuko
on 10 Sep 2020
Tensuko
on 10 Sep 2020
Das Szenario hab ich aber für Abfahrer mit mehreren Behältern noch nicht zum Laufen bekommen. Wäre dann wohl ähnlich der Zwangsbeladung aus https://github.com/Courseplay/courseplay/issues/5799 ? Die funktioniert bisher halt noch nicht, der Abfahrer fährt immer bis zum Startpunkt weiter, selbst wenn sein erster Behälter sich schon unter einer ihn befüllenden Pipe befindet. Der erste Behälter bekommt dann immer nur ein paar Liter ab.
Ich hab das heut auch noch mal durchprobiert, der ULW lädt grundsätzlich an jedem Wartepunkt immer nur in ein und den selben Behälter über. Sobald der Abfahrer sich zB in Bewegung setzt, weil voll oder manueller Eingriff, klappt auch der ULW seine Pipe wieder ein und macht seinen Kurs weiter, wartet also nicht auf einen eventuell nachfolgenden Abfahrer oder den zweiten Anhänger des Gespanns. Wenn der ULW-Füllstand immer noch höher ist als sein "Abfahren bei", dreht er halt eine Runde und kommt zurück zum Überladepunkt um dort entweder abzuladen oder so lange zu warten bis genau dort ein Abfahrer mit noch Aufnahmekapazität bereitsteht.
Von daher wäre es ganz cool, wenn man für dieses Warten ein Timeout festlegen könnte, wo das Warten abgebrochen wird, und der ULW sich wieder in Bewegung setzt um zB einen zweiten Überladepunkt anzusteuern.
Bisher ist der ULW vollautomatisch nur einsetzbar, wenn das komplette Ladevolumen der Abfahrer sich in jeweils nur einem Behälter befindet. US-Truck mit Krampe-Auflieger sieht aber etwas seltsam aus, abgesehen davon dass die meisten ULW von zB Brent oder Elmers auch gar nicht die dafür nötige Überladehöhe haben ;) Oder man setzt den Parameter "Abfahren bei" der Trucks auf halb leer, dann bleibt der zweite Anhänger/Behälter halt immer leer :D
rohne83
on 10 Sep 2020
Bilder sagen mehr als tausend Worte.
das ist soweit das normale Setup mit nur einem Überladepunkt. Da lässt sich aber immer nur einer der beiden Behälter des Trailers befüllen. Macht auch keinen Unterschied ob vorne oder hinten. Wenn der Abfahrer erst bei mehr als 50% auf die Reise geschickt wird, kommt man aber sogar auch hiermit in diese endlose Wartesituation (habe ich weiter unten für das erste Bild von Punkt 5 dann auch vorsätzlich herbei geführt)
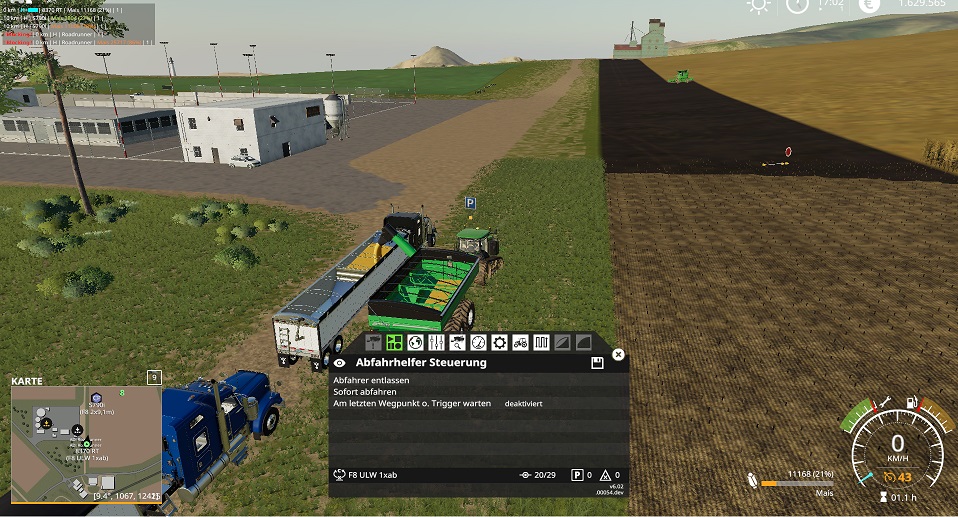
So mach ich das stattdessen gerne: Zwei Wartepunkte, je Behälter einer. Der ULW entlädt zunächst am ersten Wartepunkt...

... sobald dieser voll ist (wie im Bild), fährt er ein Stück weiter um auch am zweiten Wartepunkt abzukippen. Klappt soweit auch erstmal wunderbar. Falls der ULW leer ist, werden eh sämtliche Wartepunkte ignoriert, was ja auch sinnvoll ist.

Wenn der Trailer davon aber nicht soweit voll wurde, dass sein Abfahr-Schwellwert erreicht wurde, kommt man beim nächsten Überladetermin in diese Situation die manuelles eingreifen erfordert: der erste Behälter ist vom vorherigen Befüllen bereits voll. ULW will aber zunächst hier abladen, kann dies aber nicht, und wartet bis zum Ende aller Tage. Timeout, das ihn wieder in Bewegung setzt (womit er dann am zweiten Wartepunkt versuchen würde abzuladen), würde die Situation auflösen und der ULW käme auch mit solchen Abfahrern problemlos zurecht.

Dann hab ich nochmal versucht, wie ich das verstanden habe "Anders wäre es, wenn man einfach mehrere Farhzeuge mit Trailer im Mode1 fahrn lässt, welche dann unter den ÜLW fahren, sobald der vordere weg ist ?". Also ähnliche Situation geschaffen wie bei https://github.com/Courseplay/courseplay/issues/5799 , nur mit ULW statt MotherBin: Der ULW kommt zum Überladepunkt, wartet dort aber erstmal weil der erste Abfahrer schon voll war. Den ersten hab ich rausgenommen, so dass der zweite (gesteuert von CP) nachrücken konnte während die ULW-Pipe schon/noch draußen war. ULW hat auch brav angefangen abzuladen, zunächst natürlich in den ersten Behälter, während der LKW noch ein Stück vorwärts bis zu seinem eigentlichen Startpunkt rollt (der so gesetzt war, dass die Pipe des ULW genau mittig den hinteren Behälter trifft). Das hat gerade mal zu einem Entladen von 1595 Litern geführt (siehe LKW-Füllstand) - eben bis sich das Ende des Behälters unter der ULW-Pipe befand. Sodann hat der ULW das abladen komplett abgebrochen, die Pipe eingefahren und ist wieder auf seinen Kurs gefahren. Da "Abfahren bei" auf 65% gestellt war und er noch etwas mehr als das hatte, ist er halt schön im Kreis zurück zum Überladepunkt gefahren. Screenshot ist entstanden wenige Augenblicke nachdem der ULW das Abladen abgebrochen hat. Mit einfach-Behältern würde das wahrscheinlich genauso ablaufen, also kein Abladen auf mehrere Trailer im selben Zuge möglich.


rohne83
on 10 Sep 2020
Mal schauen was uns da einfällt.
Tensuko
on 10 Sep 2020
@Tensuko soll wa das so machen das sobald ein Anhänger oder eine filluint unter der pipe voll ist er wieder zum anfang des refill courses fährt ?
 schwiti6190
on 21 Sep 2020
schwiti6190
on 21 Sep 2020
@schwiti6190
Du meinst überladekurs, hmm könnte man theoretisch so machen, aber das würde nichts helfen, wenn das wartende Gespann 2 Trailer hat und somit noch freie kapazität. Der ÜLW würde wieder am Wartepunkt/vollem Trailer ankommen.
Prinzipiell und für alle arten des befüllens im Mode1 (ÜLW, Radlader, Förderband, ...) wäre gut:
Wenn 2 Trailer und Trailer 1 ist voll, soweit vor fahren, dass der 2te Trailer an der Position des ersten steht.
Das würde auch für Mode9 helfen. Wird beim Wilson wieder etwas tricky.
Mehrere Wartepunkte für Mode3 wie oben im Screenshot hilft nur in dieser Situation.
Wäre jetzt für den Mode3 die Entscheidung, wann er da weg fahren darf, erst wenn er leer ist ?
Wollen wir erwarten, dass genug Gespanne im Mode1 dort warten um den ÜLW leer zu bekommen, dass er weiter arbeiten kann oder wollen wir den Mode3 Fahrer wegschicken, wenn nach X sekunden nicht überladen werden kann ?
Tensuko
on 21 Sep 2020
"ein anhänger x meter weiterzufahren" wird zu kompliziert. Dann würd ich eher sagen ÜLW fahr solange Entladekurs bis entladen geht bis zu maximal Wartepunkt. Sobald die pipe rückmeldung hat Anhänger unter rohr ist voll warte kurz oder fahr den ablade kurs erneut.
schwiti6190
on 21 Sep 2020
Wartezeit fand ich halt insofern günstig, da man dann auch AD-Abfahrer verwenden kann. Der Anwendungsfall ULW ist ja tatsächlich vA da sinnvoll wo man die Abfahrer nicht aufs Feld lassen will, sondern diese sich fast nur auf den Straßen aufhalten. Aber glücklicherweise kann CP auch AD-Kurse laden, von daher wäre das kein Beinbruch wenn das erstmal nur mit CP-Abfahrern läuft.
Das so zu machen, dass die Abfahrer von selbst vorfahren, klingt auf jeden Fall nach einer coolen Idee. Könnte evtl auch die Lösung für #5799 sein. Aber da hat schwiti ja eben schon gemeint das ist zu kompliziert.
Bezüglich "Wäre jetzt für den Mode3 die Entscheidung, wann er da weg fahren darf, erst wenn er leer ist ?":
Egal für welchen Weg ihr euch entscheidet, in meinen Augen sollte am Wartepunkt nicht unendlich lange gewartet werden, egal ob der ULW schon leer ist oder noch nicht. Wenn da innerhalb von ca 5-10 Sekunden (das sollte so die Zeit sein, die in einer Schlange am Überladepunkt aufgereihte Abfahrer brauchen um eine Station vor zu kommen) keine noch freie FillUnit unter die Pipe kommt, sollte auf jeden Fall der Abladekurs fortgesetzt (nicht komplett abgebrochen oder von vorn begonnen) werden, damit der ULW zu einem eventuellen nächsten Wartepunkt oder dem Endpunkt des Überladekurses fahren kann - also wenn ich das richtig sehe sein state von WAITING_FOR_TRAILER wieder auf ENROUTE wechselt. Am Ende des Überladekurses prüft der ULW dann ja sowieso ob er aufs Feld Drescher abtanken kann oder erst selbst nochmal Abladen muss weil sein Füllstand immer noch höher ist als sein "Abfahren bei".
rohne83
on 21 Sep 2020
Das will ich aber vermeiden, dieses ständige neu Anfahren des Abladekurses, weil 'oh ich hab noch was drin, versuchen wir es noch einmal'.
Tensuko
on 21 Sep 2020
Naja, das würde ja er nur machen, wenn er es nicht schafft, seinen Füllstand auf weniger als das "Abfahren bei" zu bekommen. Das hat ja dann insofern auch jeder Nutzer selbst in der Hand, durch die Anzahl und Kapazität seiner Abfahrer. Wenn er sich da eine zu schlechte Abfahrlogistik zusammengestellt hat, dann muss er halt damit klarkommen wenn sein ULW ein paar mal im Kreis fährt, fänd ich persönlich jetzt nicht so schlimm :D Er wüsste ja auch direkt woran es liegt, braucht nur seine Einstellungen anzuschauen. Bzw, wenn man das wie im Ursprungsbeitrag vorgeschlagen mittels einstellbarer Wartezeit macht, dann könnte sogar jeder selbst bestimmen, ob er am Wartepunkt ewig wartet oder irgendwann weiter macht. Standardmäßig ist die ja aus, würde also ewiges Warten bedeuten, wenn ich das richtig sehe.
rohne83
on 21 Sep 2020
Wobei ich mir grad gar nicht so sicher bin ob das wirklich so clever wäre mehrere Trailer am ULW und am MotherBin/Förderband mit ein und der selben Logik abzuwickeln. ULW kann sich ja grundsätzlich seine Überladeposition selbst aussuchen und ist auch nicht immer an Ort und Stelle wenn die Abfahrer ankommen. Während Förderband etc ja tatsächlich quasi stationär sind. Für die Förderbänder und co wäre es am geilsten wenn ihr es da hinbekommen würdet dass die Mode1-Abfahrer sich unter einer Pipe/Förderband/... da ganz genauso verhalten wie an einem normalen Silo - wobei ich natürlich keine Ahnung hab ob das mit überschaubarem Aufwand machbar ist.
Unabhängig davon würde ich dem Mode3-ULW dann zwei Änderungen verpassen, die aber mit obigem auch komplett kompatibel wären: 1. wie von Tensuko vorgeschlagen beim Beenden von OVERLOADING erstmal prüfen ob er selbst schon leer ist. Wenn ja, dann wie bisher Pipe einklappen und auf ENROUTE übergehen; wenn nicht, dann stattdessen zunächst die Pipe draußen lassen und zurück in WAITING_FOR_TRAILER übergehen (damit er an Ort und Stelle auf das Nachrücken eines eventuellen nächsten Trailers/Abfahrers wartet), 2. die im Ursprungsbeitrag vorgeschlagene Möglichkeit dieses WAITING_FOR_TRAILER aber nach ner gewissen Zeit (hardcoded oder möglichst durch Nutzer selbst einstellbar, zB eben über die Haltezeit) abbrechen zu lassen und nach diesem Timeout ebenfalls wieder auf ENROUTE zu wechseln.
Wenn man diese Wartezeit selbst einstellen kann, hat es sogar jeder Nutzer komplett selbst in der Hand, ob er mehrere Überladepunkte setzt oder nur einen, und ob er seinen ULW am Überladepunkt wirklich unbedingt jedes Mal restlos bis runter auf 0% entleeren lassen will, oder ob er ihn lieber nur ein paar Sekunden warten lässt und das Risiko eingeht, dass er dann wegen noch zu hohem übriggebliebenen Füllstand den Überladekurs mehrmals befährt. Je nachdem wie er es mag und was ihm in seiner Situation bei der Art, Kapazität, Anzahl und Steuerung (ob CP oder AD) seiner Abfahrer am sinnvollsten erscheint ;)
Sieht für mich soweit erstmal nach dem zielführendsten Weg aus der mit den meisten Anwendungsfällen klarkäme, und der wohl auch ausreichend Spielraum für die im Rahmen dessen sonst noch angedachten Änderungen am Mode1 ließe. Was meint ihr dazu?
rohne83
on 22 Sep 2020
Wobei ich mir grad gar nicht so sicher bin ob das wirklich so clever wäre mehrere Trailer am ULW und am MotherBin/Förderband mit ein und der selben Logik abzuwickeln. ULW kann sich ja grundsätzlich seine Überladeposition selbst aussuchen und ist auch nicht immer an Ort und Stelle wenn die Abfahrer ankommen. Während Förderband etc ja tatsächlich quasi stationär sind. Für die Förderbänder und co wäre es am geilsten wenn ihr es da hinbekommen würdet dass die Mode1-Abfahrer sich unter einer Pipe/Förderband/... da ganz genauso verhalten wie an einem normalen Silo - wobei ich natürlich keine Ahnung hab ob das mit überschaubarem Aufwand machbar ist.
Und genau das ist es was wir vor haben. Trailer voll, fahre vor, wie am Silo. Einfach abwarten... :)
Tensuko
on 22 Sep 2020
Ich verstehe Euch nicht! Warum dieses ganze hin und her?
LKW steht wie am HauptSilo ja auch unter der Piepe und lädt, wenn die Zugmaschine voll ist zieht er ja auch von alleine vor!
Warum geht das nicht bei einem Überlader (Bin)?
siehe Bild

 Lustiger-Hubi
on 24 Sep 2020
Lustiger-Hubi
on 24 Sep 2020
Ein ÜLW ist kein Trigger wie ein Silo!
An einem Silo drückst du R um etwas bestimmt es zu laden, an einem ÜLW stehst du einfach nur und das was im ÜLW ist rieselt in den Trailer hinein. Jetzt müssen wir eine bestimmte Distanz vor fahren damit der Inhalt vom ÜLW in den nächste Trailer rieseln kann.
Das ist noch nicht implementiert, ist aber eben geplant und da gilt es andere Parameter zu berücksichtigen, als bei einem normalen Silo.
Tensuko
on 24 Sep 2020
Ich löse das Problem momentan so!

Lustiger-Hubi
on 24 Sep 2020
Das löst das Problem nicht, aber ist ein Workarround...
Wenn das Geld bei dir keine Rolle spielt, kannst du auch einen 2ten LKW oder sogar dritten LKW auf den gleichen Kurs setzen zum laden, wenn der eine voll ist, fährt der weg und der nächste wartet am ersten Wegpunkt bis er voll ist.
Aber auch das ist nur ein Workarround und keine Lösung des Problems...
Tensuko
on 24 Sep 2020
gleich zwei MotherBins ist ja schon bischen mit Kanonen auf Spatzen geschossen, und sicherlich auch logistisch etwas aufwändig (welcher ULW fährt wann zu welchem MotherBin, etc), da warte ich lieber noch bis die Jungs den Mode1-Abfahrer entsprechend angepasst haben...
Da ich aber unabhängig davon nach wie vor die Haltezeit im Mode3 für meine Zwecke als sehr nützlich ansehe, hab ich die mal mittlerweile sogar selbst zusammengefrickelt. Wäre ein Stück weit ja wohl sowieso auch nötig, da nach Ende des Überladens der ULW - falls noch nicht ganz leer - an Ort und Stelle auf den nächsten Trailer warten soll, statt wie derzeit die Pipe einzuklappen und direkt den Kurs weiterzufahren. Aber eben auch die Dauer dieses Wartens möchte ich durch die Haltezeit beschränken. Wäre ja blöd wenn der nächste Abfahrer noch weit weg ist, und der ULW dann wegen wenigen hundert Litern die nicht mehr in den letzten Abfahrer gepasst haben, davon abgehalten wird, zurück aufs Feld zu fahren. Also falls ihr dazu noch nix gemacht habt, dies aber doch noch mit aufnehmen wollt, könnt ihr euch da gerne dran bedienen. Ansonsten hoffe ich nur, dass ich meine Änderungen auch bei zukünftigen CP-Versionen bei Bedarf weiterhin mit wenig Aufwand nachziehen kann :D
Hab die entsprechend angepasste OverloaderAIDriver mal unten als Textdatei angehängt. Änderungen waren gar nicht mal so viele nötig, alle markiert durch entsprechende Kommentare. Hauptsächliche Änderungen dabei in der driveUnloadCourse. Ansonsten nur je eine zusätzliche Zeile in init und onWaypointPassed, sowie eine neue Funktion. Die neue Funktion ist continueAfterTimeout, die die ganzen Schritte die zum weiterfahren nach Überladen/Timeout nötig sind bündelt. Dort wird auch geprüft ob die Haltezeit überhaupt auch schon abgelaufen ist.
Am kniffeligsten war die richtigen Zeitstempel hinzubekommen, self.lastMoveCommandTime ist da vielfach ungeeignet für. Daher eine neue private Variable waitTimeStart, und entspr. ihre Wertzuweisungen in init, onWaypointPassed und driveUnloadCourse. Lässt sich einiges sicherlich auch besser machen. ZB addiere ich zZ für das Pipe ausklappen nochmal hardcoded 5 Sekunden drauf, das ließe sich bestimmt auch automatisch ermitteln. Ansonsten wäre für das Warten nach Abschluss Überladen (mit Pipe immer noch draußen) wohl ein zusätzlicher Status ganz sinnvoll, denn aktuell geht er in WAITING_FOR_OVERLOAD_TO_START wo ja jene 5 Sekunden draufgerechnet werden. Aber für meine Zwecke reicht es auch so bereits ;)
Klappt insgesamt auch sehr gut soweit und läuft ohne Fehlermeldungen. Probiert bisher mit den ULW von Elmers, Bergmann, Annaburger und Brent. Einzig einer der beiden Mods für den Brent Avalanche scheint generell Probleme zu haben, wenn eine Haltezeit eingestellt ist - auch bei der normalen CP Version ohne meine Änderungen: Wenn in den Trailer noch was reinpasst, er selbst aber leer ist, bleibt er stehen, im Status OVERLOADING mit ausgefahrener Pipe und laufender Abladeschnecke. Passiert aber soweit nur bei diesem einen Mod, also ist der Fehler wohl eher da zu suchen. Gibt für den gleichen ULW aber ja noch einen anderen Mod, wo man sogar die Farbe auswählen kann, und jener macht keinerlei Probleme...
rohne83
on 24 Sep 2020
Das wäre der nächste schritt...
Prüfe obTrailer vorhanden, wenn nicht, ist mein fillvolumen kleiner als der Wert abfahren bei, wenn ja, fahre zum stoppunkt und wechsel in waiting_for_combine_to_call.
Also nichts mit du hast x sekunden zeit und dann pech gehabt, sondern prüfen ob ich los darf :)
Weil was will man mit einem zu 90% gefüllten ÜLW, wenn ein weiterer Trailer gerade ankommt ;)
Tensuko
on 24 Sep 2020
Ja, klar. Nur wird es sicherlich auch weiterhin Situationen geben wo ich das lieber mit mehreren Überladepunkten mach, vA wenn man die Abfahrer von AD steuern lässt. Im echten Leben ists ja auch eher der ULW der da hin- und herrödelt, während die Abfahrer nur faul rumstehen :D
Und man kann den ULW auch wieder in Bewegung bekommen wenn man an den Werten im HUD herumspielt. Wenn er aber einmal ohne Timeout auf nen Trailer wartet, dann wartet er bis zum bitteren Ende oder man entlässt den Abfahrer ;)
Ansonsten mal zB folgende Situation: Abfahren bei ist auf 80% eingestellt, ULW kommt dann vom letzten Drescher abtanken also mit meinetwegen 90% am Überladepunkt an, kann davon aber nur 30% in den ersten Abfahrer abladen. Würde bedeuten, dass der ULW nach dem Überladen immer noch 60% hat, aber damit schon wieder reif ist für die Rückkehr aufs Feld. Wenn der nächste Abfahrer zwar schon in der Nähe ist, aber noch nicht nah genug dran, dass sein Trailer als vor Ort gewertet wird, würde der ULW dann halbvoll aufs Feld zurückfahren, obwohl er bei ein paar Sekunden längeren Wartens auch noch den Rest oder zumindest einen großen Teil davon los werden könnte. Das wird dann wohl davon abhängen wie großzügig ihr ihn das "Trailer vorhanden" auslegen lasst.
rohne83
on 24 Sep 2020
Ich weiß ich weiß!
Ich konnte mich noch erinnern, das es in LS17 funktionierte!
Habe es nochmal ausprobiert und es geht da super!
Frage: Warum wird etwas, was funktionierte einfach verworfen?
Patentrechte? Oder andere Sachen (Giantis)
Ich habe den Eindruck, dass irgendwann keiner weis wie er was einstellen soll!
Es wird einfach, auf Dauer, zu kompliziert!
So, das war jetzt aber mein allerletzter Kommentar zu CP
Lustiger-Hubi
on 25 Sep 2020
So, das war jetzt aber mein allerletzter Kommentar zu CP
Na, warten wirs ab...
Frage: Warum wird etwas, was funktionierte einfach verworfen?
Für diejenigen, die es noch immer nicht vertanden haben....
Hier wird nichts verworfen! CP in FS17 kann NICHT einfach 1zu1 in FS19 übertragen werden, weil einiges im 19er ANDERS ist!
Außerdem müssen wir, damit wir besser mit dem Code Arbeiten können, viels aufräumen.
Es wird einfach, auf Dauer, zu kompliziert!
Daran ist nichts kompliziert, es muss einfach mal abgewartet werden bis es fertig ist und nicht zwischendurch ständig gesagt werden geht noch immer nicht! Wir machen das in unserer Freizeit und nicht hauptberuflich und haben auch genug andere Baustellen in CP, als immer nur das eine!
Tensuko
on 25 Sep 2020
Bezüglich eurer hierzu angedachten Änderungen beim Mode 1: falls nicht zu viel Aufwand wäre es ganz cool, wenn ihr das berücksichtigen mehrerer Trailer auch beim Mode 2 einbauen könnt. Da wird vom Drescher/Häcksler ja bisher ebenfalls nur auf den ersten Trailer abgetankt. Interessanterweise klappt genau das bei AD-Abfahrern schon heute. Allerdings ist es mir lieber auf dem Feld selbst allein mit CP unterwegs zu sein, allein schon auch wegen der ab und zu immer mal nötigen manuellen Eingriffe (Abfahrer bei Kollisionen entlassen und mit 'unloading' neu einstellen, oder auch die Möglichkeiten in der Dreschersteuerung wie 'Abfahrer wegschicken').
rohne83
on 11 Oct 2020
Für Mode2 wird das nicht passieren, da wir mit Mode2 auch mal rückwäts fahren, was mit mehreren Trailern nicht funktionieren wird.
Tensuko
on 11 Oct 2020
Ich dachte dabei auch eher an LKW mit Pritsche und Anhänger, zB MAN oder der DDR-W50. Beim Häckseln klappt das sogar schon recht gut auch mit CP, aber zum Drescher abtanken muss man dafür zur Zeit allein auf AutoDrive-Abfahrer zurückgreifen.
rohne83
on 22 Oct 2020
Bevor Verwirrungen zu dem geschlossenen Issue entstehen:
- Mode1 Driver fährt nun wenn er 2 Trailer hat, einen weiter vor, das klappt sowohl mit dem Wilson, also auch mit 2 verschiedenen Trailern.
- Was aktuell noch passiert (und das wird als nächstes gemacht) der ÜLW haut uns ab obwohl er noch etwas drin hat, wir verfolgen da 2 Ansätze dies zu lösen, bitte noch etwas Geduld.
Tensuko
on 2 Dec 2020
Habs mir eben mal angeschaut. Die Änderungen am Mode 1 sind für Förderbänder, MotherBins und co sicherlich gut geeignet und sehen auch ziemlich gut aus soweit.
Problematisch finde ich aber das neue Verhalten des ULW. Wenn der mehr in seinem Trailer hat, als der Abfahrer aufnehmen kann, bleibt er einfach stumpf am Überladepunkt stehen. Heißt, wenn er nicht ganz leer wurde, muss er jetzt am Feldrand warten, bis der Abfahrer von seiner Tour zurückkommt, selbst wenn es nur tausend Litern liegt. Grade dafür wäre jetzt die ursprünglich vorgeschlagene Haltezeit wieder Gold wert.
Von daher werd ich in Zukunft für den ULW wohl eher auf die alten CP-Versionen zurückgreifen müssen. Oder schauen dass ich meinen Haltezeit-Check auch in die aktuelle Version eingebaut bekomme. Vor allem auch da ich für den Straßentransport vorrangig AD verwende, wo der ULW ohnehin mehrere Überladepunkte braucht.
Edit ist gerade aufgefallen, dass der ULW auch wenn er leer ist nicht mehr weiterfährt, selbst wenn ein Drescher entladen werden muss. Muss mir das morgen nochmal anschauen, ob das auch bei anderen ULWs auftritt (bisher probiert mit Elmer's Haulmaster von Giants selbst und dem Mod für den Brent Avalanche) aber sieht so aus als wäre das ein handfester Bug.
rohne83
on 2 Dec 2020
Das habe ich doch geschrieben das wir das noch steuern wollen..... Wir werden sowas NICHT Zeitgesteuert regeln.
Tensuko
on 3 Dec 2020
Wenn ihr das auch ohne Zeit hinbekommt soll mir das recht sein. Hauptsache es gibt auch eine Lösung da auch weiterhin AutoDrive-Abfahrer nutzen zu können ;) Die fahren ja im Gegensatz zum CP-Mode1 nicht selbständig vor.
In der aktuellen Version ist es aber so, dass der ULW gar nicht mehr vom Wartepunkt aus zurück aufs Feld fährt, selbst wenn er leer ist. Egal wieviele Trailer oder Wartepunkte. Gibts da irgendwelche neuen Einstellungen die man wissen sollte, oder ist die Weiterfahrt jetzt erstmal bewusst komplett deaktiviert?

Apropos Einstellungen: grad die Änderungen beim Mode1 scheinen doch recht umfangreich zu sein, so dass man sich jetzt erstmal ins neue Verhalten reinfuchsen muss. Er versucht jetzt also ab dem Startpunkt seine Trailer zu beladen. Klappt das auch mit mehr als zwei FillUnits (Stichwort RoadTrain) oder ist das limitiert auf zwei? Und das Beladen ab Startpunkt gilt jetzt auch für Silos, nehm ich an, oder werden die weiterhin zwischen Ziel- und Startpunkt gesucht?
MotherBin hab ich zB auch noch nicht richtig hinbekommen. Der Mode1 fährt zwar mit nur 3km/h vor, hält aber nicht an wenn der Trailer unterm Rohr ist und beladen wird, sondern fährt immer weiter vor. Das muss ich mir bei Gelegenheit auch nochmal genauer anschauen. Setup wie im https://github.com/Courseplay/courseplay/issues/5799, nur dass ich aus Realismus-Gründen keine Krampe-Anhänger verwende sondern ein oder mehrere Wilson (gibts als Mod genau den gleichen wie von Giants, nur zusätzlich mit Kupplung um per Dolly weitere Anhänger dran zu hängen).
rohne83
on 3 Dec 2020
Das mit vor fahren ist noch nicht drin im Wiki, für alles andere, ganz einfach gehalten:
https://github.com/Courseplay/courseplay/wiki/Mode-1-Changes
So wie du das am Feldrand machst, keinen FillType eintragen und fertig, sollten mehrere Trailer am 'Raodtrain' sein, wird er automatisch einen weiter vor fahren (das ist nützlich bei mehreren Arten der Beladung, sei es ÜLW, Förderband, Radlader, so ist es für uns am Sinnvollsten)
Für den ÜLW wird es ein Value geben, den man einstellen kann, wann er wieder los fährt.
Heist steht mein Wert z.B. auf 20% wird er mit <= 20% weiterfahren.
Mehrere Wartepunkte werden so wohl nicht gehen und das ist auch nicht vorgesehen!
Wie AutoDrive damit arbeitet ist ein anderes Problem, versuchen kann man es mit mehreren Wartepunkten, wir werden das aber erst mal genau so machen. Zeitlich gesteuerte Abläufe funktionieren bei so einem System einfach nicht, darum haben wir uns ganz klar dagegen entschieden.
Tensuko
on 3 Dec 2020
Ok, danke für die Hinweise. Das klingt schonmal gut, werd ich mal bei Gelegenheit durchprobieren.
Wenn der Abfahrwert nur darüber entscheidet ob nach dem Überladen gewartet wird oder weitergefahren wird, könnte das dann tatsächlich auch ziemlich einfach mit mehreren Wartepunkten an AD-Abfahrern (und selbst am Feldrand abgestellten Anhängern ohne Zugmaschine) klappen.
Also statt recht niedrigem Wert, wie er bei Mode1-Abfahrern sinnvoll wäre, einfach 100% einstellen, so dass er definitiv nach jedem Abladen weiterfährt, denk ich mal ;) Am nächsten Wartepunkt würde er ja wohl trotzdem erstmal prüfen ob er selber noch was geladen hat und notfalls wieder versuchen überzuladen. Wenn man gegen diesen Wert auch bei WAITING_FOR_OVERLOAD_TO_START vergleicht, dürfte damit sogar die Situation ganz oben im vierten Screenshot (also bereits voller Trailer am ersten Wartepunkt) behoben sein. Und ich wäre wunschlos glücklich :D
Klingt jedenfalls nach einer sehr eleganten Lösung. Bin auf jeden Fall gespannt
rohne83
on 3 Dec 2020
Da wir prüfen 'habe ich weniger als X%' und wenn ja dann 'fahre weiter' machen, wird man bei einem 2ten Wartepunkt das gleiche Ergebniss haben.
Ich habe Axel bereits informiert was wir mit unserem Fahrer gemacht haben, bzw wie er sich verhält bei 2 Trailern und ihm vorgeschlagen sowas auch für AD zu implementieren. Es ist eben in mehreren Situationen sinvoll, bei einem 2ten Trailer einfach einen vor zu rücken, egal womit man diesen belädt. Das würde AD eben auch bei Förderbändern und Radladern helfen (z.B. Player die mit Radlader beladen wollen).
Dabei geht es eben rein darum, die Problematik mit 2 Trailern zu lösen.
Tensuko
on 3 Dec 2020
Bin mir grad nicht ganz sicher, aber ich vermute halt dass ihr die Prüfung auf "fahre weiter ab" eigentlich nur im Status OVERLOADING machen müsst, also da wo ihr prüft ob der Überladevorgang mittlerweile abgeschlossen ist. Wäre auch für euch wohl am wenigsten Aufwand. Bei der Ankunft am Wartepunkt dagegen könnte man dann auch wie bisher auf isTrailerEmpty prüfen. In dem Fall würde es dann auch mit mehreren Wartepunkten eigentlich kein Problem darstellen. Naja, mal abwarten
rohne83
on 3 Dec 2020
Du musst auch mal an andere Situationen denken....
ob der Überladevorgang mittlerweile abgeschlossen ist
Das heist wenn im Trailer nur noch Platz ist für 10% aus dem ÜLW, dann soll der ÜLW mit 90% wieder zum Drescher fahren, wenn wir nur einen Wartepunkt und einen Trailer haben ? Nein das wird nicht gehen und nicht gemacht.
Bei der Ankunft am Wartepunkt dagegen könnte man dann auch wie bisher auf isTrailerEmpty prüfen.
Gleiches Problem wie oben, kein Trailer da, noch 90% im ÜLW, was jetzt ?
Glaub mir einfach, wir habe uns da schon unsere gedanken gemacht und ich habe es eben in der Testversion probiert, es funktioniert genau so wie es sein soll. 2 kleine Anpassungen noch und es kommt in den release.
Tensuko
on 3 Dec 2020
Da haben wir wohl aneinander vorbei geredet. Hab grad mal die Master-Branch mit den jüngsten Mode3-Änderungen probiert, und kann sagen dass die tatsächlich so ausgefallen sind wie ichs erhofft/erwartet hatte. Und ja damit sind auch weiterhin mehrere Wartepunkte möglich. Also vielen Dank dafür.
Ich weiß jetzt grad nicht ob es ein Mod-Problem ist oder generell auftritt, aber die Verzweigung "if not self.moveablePipe or ..." im Status WAITING_FOR_OVERLOAD_TO_START wird bei mir nie true, so dass er aus diesem Status nie mehr rauskommt, sondern stattdessen natürlich die Log vollgeschmissen wird mit "Overloading started" auch während er schon ablädt. Diese Prüfung dürfte für die gemerkte Rohrposition zuständig sein, oder? Nach vorläufigem auskommentieren der Zeile läuft es aber erstmal wieder.
Die erwähnte Situation vom vierten Screenshot würde natürlich erstmal weiterhin auftreten, aber den Lösungsansatz dafür hab ich auch schon parat. Nur eine kurze Frage diesbezüglich: Gibt es - sei es im CP-Code oder der API von Giants - eine Möglichkeit abzufragen, ob die Pipe bereits fertig ausgeklappt ist? Möglicherweise soll just jene von mir erstmal auskommentierte Zeile genau das bewerkstelligen?
rohne83
on 5 Dec 2020
Hab grad mal die Master-Branch mit den jüngsten Mode3-Änderungen probiert, und kann sagen dass die tatsächlich so ausgefallen sind wie ichs erhofft/erwartet hatte. Und ja damit sind auch weiterhin mehrere Wartepunkte möglich. Also vielen Dank dafür.
Na wenn es bei dir klappt ist ja gut.
Wir haben das halt komplett abgestimmt mit der Mode1 Änderung.
ÜLW kommt an, befüllt bis Trailer voll, wenn 2ter Trailer da ist, fährt der Mode1 driver einen vor, ansonsten weg.
Ist der ÜLW noch über seinen erlaubten Abfahren bei Wert, wartet er mit eingeklappten Rohr bis er weiter entladen kann.
Ist er unter seinem Wert und kann nicht mehr abladen weil Trailer voll oder sowas, dann fährt er wieder los um den Drescher ab zu tanken.
Dein Status Problem habe ich so nicht bemerkt und hängen geblieben ist er auch nicht weil sonst könnte er nicht weiter abladen nachdem ein neuer Mode1 Driver ankam. Hast du denn eine Toolposition zugewiesen ? Kleine Hinweis, unser HUD macht uns wieder mal zu schaffen, du müsstest warscheinlich einmal Mode wechseln damit dir die Option für die Toolposition angezeigt wird, dann sollte es auch klappen. Vlt kriegen wir das noch gefixt...
Die erwähnte Situation vom vierten Screenshot würde natürlich erstmal weiterhin auftreten, aber den Lösungsansatz dafür hab ich auch schon parat.
Deswegen nur einen Wartepunkt und der Mode1 driver fährt vor, ggf AD, was die dafür machen könnten das sowas klappt (und ich wiederhole mich, das ist praktisch für Radlader, Förderbänder usw usw) habe ich Axel ebreits geschrieben.
Wir werden so an dem System jetzt nichts mehr ändern, da es genau so funktioniert wie es soll.
Tensuko
on 5 Dec 2020
Position hab ich keine zugewiesen. Ist die Pflicht? Wollte es dann auch tatsächlich mal mit eingestellter Rohrposition versuchen, aber da kam das HUD-Problem dazu und die Option war schon nicht mehr verfügbar. Aber dann probier ich das nochmal mit Modewechsel. Danke. Hatte mich schon gewundert ... ;)
Wir werden so an dem System jetzt nichts mehr ändern, da es genau so funktioniert wie es soll.
Müsst ihr auch nicht, das bekomme ich bei Bedarf auch wieder selbst dazugehackt ;) Nur eben die Frage wie ich ermitteln kann ob die Pipe bereits fertig ausgeklappt ist.
rohne83
on 5 Dec 2020
Müsste etwas damit zu tun haben
(augerPipeToolPositionsSetting:hasValidToolPositions() and not augerPipeToolPositionsSetting:updatePositions(dt,1))
Tensuko
on 5 Dec 2020
Ok, danke. Ich werd mal bischen rumprobieren damit.
Bezüglich AutoDrive selbst noch eine Ergänzung: für den Wunsch dass sich AD-Abfahrer genauso verhalten wie euer Mode1 hatte ich vor nem Monat dort sogar schon ein Issue aufgemacht (der dritte Punkt bei https://github.com/Stephan-S/FS19_AutoDrive/issues/1621). Damals noch mit Fokus auf MotherBin, aber für den Abfahrer ist es ja egal, ob das jetzt eine MotherBin ist oder ein Mode3-ULW. Also falls ihr eine Referenz braucht.. ;)
rohne83
on 5 Dec 2020
Related issues
 cabmac
·
5Comments
cabmac
·
5Comments
 bojanh66
·
4Comments
bojanh66
·
4Comments
 Gonimy-Vetrom
·
3Comments
Gonimy-Vetrom
·
3Comments
 rgoe
·
3Comments
rgoe
·
3Comments
 huseyinsayar
·
3Comments
huseyinsayar
·
3Comments