hello,
i find the function get_unreal_transform in
~/PythoClient/carla/sensor.py
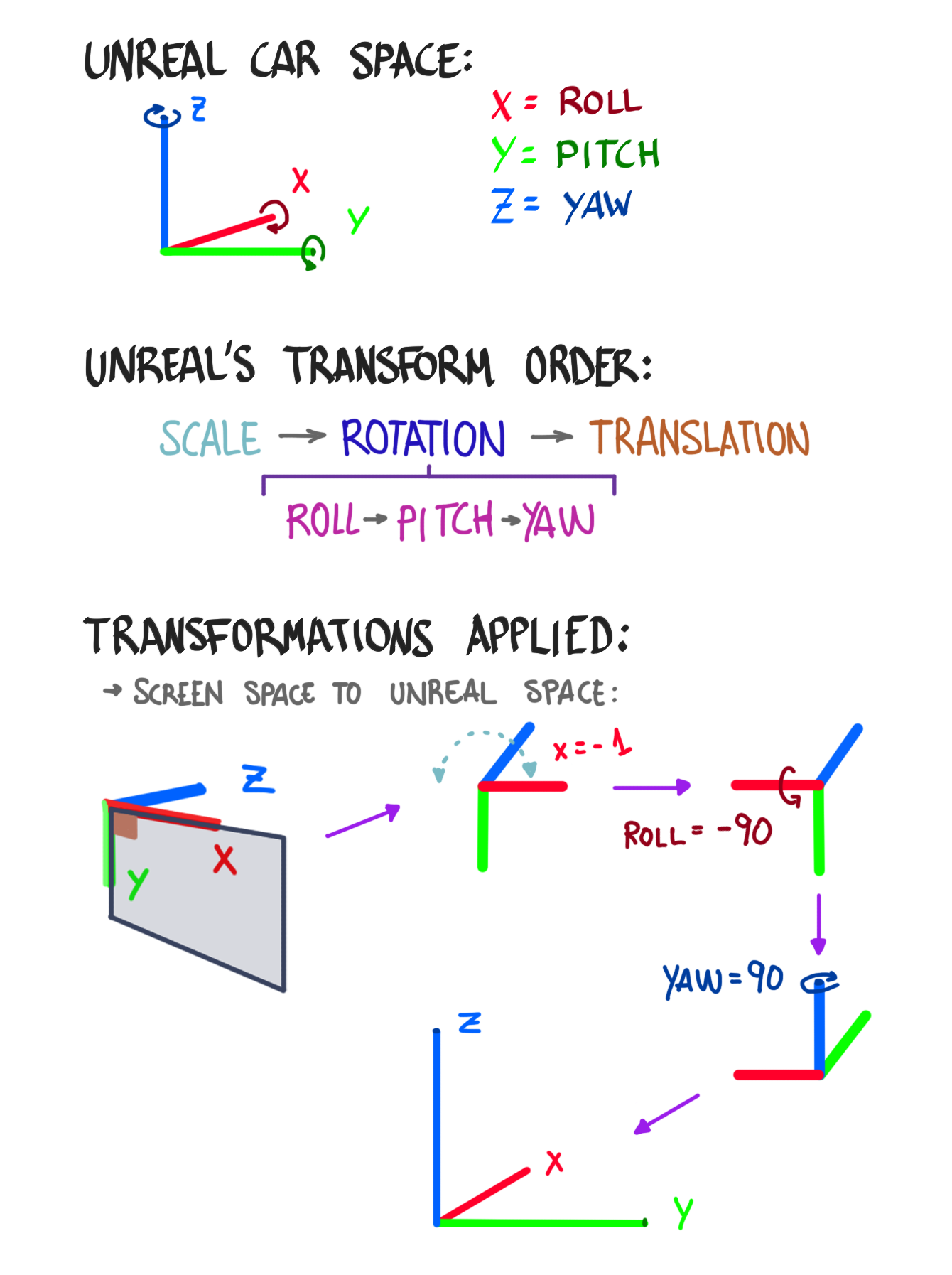
but cannot understand the values in _to_unreal_transform = Transform(Rotation(roll=-90, yaw=90), Scale(x=-1))_, such as -90,-1
besides, i find in #56 :
Given a 2D point p2d = [u,v,1], your world point position P = [X,Y,Z] will be:
P = ( inv(K) * p2d ) * depth
In my understanding, it gives the Transform from Pixel coordinate to Camera coordinate
so if i want to get results in World coordinate , i need the extrinsic matrix of my camera.
Is it correct?
thanks!
 Archiewyq
Archiewyq
All 7 comments
This issue has been automatically marked as stale because it has not had recent activity. It will be closed if no further activity occurs. Thank you for your contributions.
![stale[bot] picture](https://avatars.githubusercontent.com/in/1724?v=4&s=40) stale[bot]
on 1 Sep 2018
stale[bot]
on 1 Sep 2018
@Archiewyq Sorry for the late response.
Your thoughts are correct.
As you can see in the point_cloud_example.py on 0.8.X, we use this function to get the _camera to car_ transform:
Cheers!
 marcgpuig
on 12 Sep 2018
marcgpuig
on 12 Sep 2018
@Archiewyq Sorry for the late response.
Your thoughts are correct.
As you can see in thepoint_cloud_example.pyon 0.8.X, we use this function to get the _camera to car_ transform:
Cheers!
@marcgpuig Does this still work for carla 0.9.1 ?
 zrfreya
on 20 Dec 2018
zrfreya
on 20 Dec 2018
Hi @zrfreya, sorry for the late response.
Does this still work for carla 0.9.1 ?
Yes, it does still the same :)
marcgpuig
on 7 Jan 2019
Hi @zrfreya, sorry for the late response.
Does this still work for carla 0.9.1 ?
Yes, it does still the same :)
Does this still work for carla 0.9.5?
 gxd1994
on 21 Aug 2019
gxd1994
on 21 Aug 2019
Hi.
This graph is great. Would it be possible to add one section about transformations and axis system in the documentation, and include this graph ? I think every newcomer to Carla spends some time initially to figure it out by going through github issues. Would be really helpful to have it in one place. :)
Thanks !
 jnd77
on 21 Jul 2020
jnd77
on 21 Jul 2020
Hi @jnd77, I quickly made it a long time ago :grinning:
I'm sure that @sergi-e, our super docs guy, can do something better to add in our official docs.
Cheers!
marcgpuig
on 18 Aug 2020
Related issues
 rohanb2018
·
27Comments
rohanb2018
·
27Comments
 gkahn13
·
24Comments
gkahn13
·
24Comments
 rikardomarenzzi
·
39Comments
rikardomarenzzi
·
39Comments
 hdy117
·
23Comments
hdy117
·
23Comments
 bigsheep2018
·
20Comments
bigsheep2018
·
20Comments
Most helpful comment
@Archiewyq Sorry for the late response.
Your thoughts are correct.
As you can see in the
point_cloud_example.pyon 0.8.X, we use this function to get the _camera to car_ transform:Cheers!