Apollo: Piecewise jerk path optimizer failed when a vehicle is moving through a sharp turn
Hi, ApolloAuto community!
Can you help me and tell how can I fix this problem?
E0915 piecewise_jerk_path_optimizer.cc:205] piecewise jerk path optimizer failed
E0915 piecewise_jerk_problem.cc:104] failed optimization status: primal infeasible
E0915 path_optimizer.cc:41] Reference Line 1_0 is not drivable after PIECEWISE_JERK_PATH_OPTIMIZER
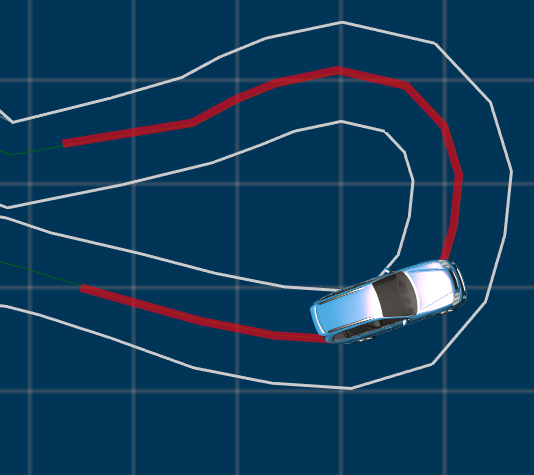
It happened when vehicle try to execute turn like at the picture. And after the last error it doesn't move.
System information
- Linux Ubuntu 16.04:
- Apollo installed from source:
- Apollo version 5.0:
 JJRedmond
JJRedmond
All 3 comments
The primal infeasible means the optimizer proved that it's impossible to find a solution for that problem. Could you please make sure,
- If it is feasible for your vehicle to make that turn (or say if the turning is too sharp to follow)?
- Or did you ever tried to change the vehicle params under
modules/common/data/vehicle_param.pb.txtif you are using your own vehicle with more flexible control?
 HongyiSun
on 16 Sep 2019
HongyiSun
on 16 Sep 2019
@HongyiSun, thanks for your reply, it's very helpful.
I used "Sim control" mode with the MKZ vehicle model and it seems this turn is not feasible.
When parameters was changed under modules/calibration/data/vehicle_param.pb.txt, ADC passed this turn.
JJRedmond
on 17 Sep 2019
@JJRedmond ,could you please tell me which parameter you have changed under modules/calibration/data/vehicle_param.pb.txt ?
I have encountered this problem too.
 BigBenSure
on 15 Oct 2019
BigBenSure
on 15 Oct 2019
Related issues
 chasingw
·
3Comments
chasingw
·
3Comments
 jamchen1025
·
3Comments
jamchen1025
·
3Comments
 CCodie
·
3Comments
CCodie
·
3Comments
 BenBaek
·
3Comments
BenBaek
·
3Comments
 Triangle001
·
3Comments
Triangle001
·
3Comments
Most helpful comment
@HongyiSun, thanks for your reply, it's very helpful.
I used "Sim control" mode with the MKZ vehicle model and it seems this turn is not feasible.
When parameters was changed under modules/calibration/data/vehicle_param.pb.txt, ADC passed this turn.