Apollo: third_party_perception 模块中全局坐标转换有bug
在第三方感知里,全局坐标转换用了如下函数:
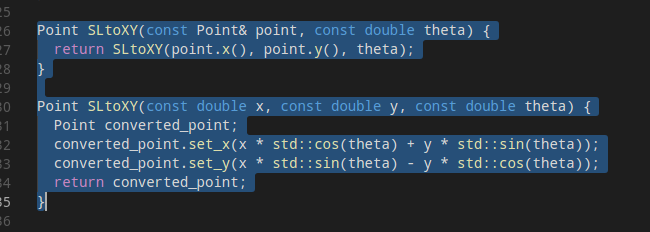
这个函数接收相对左边x,y和相对偏航角。 输出全局坐标,但是实际出来的结果是 在测试的时候,本车车头转多少角度,对应的追踪目标就绕本车转多少角度,只有在目标物与本车在一条线上时才准确。
 JonathanJones92
JonathanJones92
All 10 comments
@zhxt @bigwhite @xczhanjun FYI
JonathanJones92
on 28 Jun 2018
@diegohu FYI
JonathanJones92
on 28 Jun 2018
障碍物会随主车转向时前后平移。
JonathanJones92
on 29 Jun 2018
@jinghaomiao @all2one
JonathanJones92
on 29 Jun 2018
@JonathanJones92 Sorry, I have no idea about this. But I think @rongqiqiu may know since this module is added by him.
 zhxt
on 29 Jun 2018
zhxt
on 29 Jun 2018
@JonathanJones92 So how exactly did you use this one for ? After 2.5, third_party_perception only support : third_party_perception + relative map + navigation planning/control for 2.5 in Navi mode. It looks like you still have HD map along with third_party_perception?
 Capri2014
on 29 Jun 2018
Capri2014
on 29 Jun 2018
@Capri2014 Yes, I’m using HD map mode and I turned off the navigation mode in third party perception. From the code, it’s clear it has 2 modes which can be switched from gflags.
JonathanJones92
on 30 Jun 2018
@rongqiqiu can you help me to check this issue ?
JonathanJones92
on 1 Jul 2018
@zhxt @Capri2014 @richtong Dear colleagues,
I believing that this is a bug instead of question. As per discussion above, the coordinate system trans function has problems in transfering latitude distance .
The related functions are SLTOXY and GetAngleFromQuaternion. The 1st one responsible for rotating the the coordinate system and the 2nd one is to find the rotating angle.
I have been stuck in this problem for 2 weeks, I would appreciate if Baidu colleagues can help me to solve this.
Thanks,
Jonathan
JonathanJones92
on 2 Jul 2018
@zhxt @Capri2014 @richtong any updates? Thanks in advance @jinghaomiao
JonathanJones92
on 27 Aug 2018
Related issues
 JSnobody
·
3Comments
JSnobody
·
3Comments
 Triangle001
·
3Comments
Triangle001
·
3Comments
 freeclouds
·
3Comments
freeclouds
·
3Comments
 lesun90
·
3Comments
lesun90
·
3Comments
 YaoQii
·
3Comments
YaoQii
·
3Comments