Apollo: Running perception and prediction on the demo_2.5 bag file
The demo_2.5 bag file has the output topic from the different modules recorded and simply plays them back in Dreamview. I want to replicate the results by actually running the modules. To do this I removed these two topics from the bag file: /apollo/perception/obstacles and /apollo/prediction and run the perception and prediction nodes manually by running:
./scripts/perception_lowcost.sh start
./scripts/prediction.sh
I would expect this to replicate the results we see from playing the bag files, it only detects the lane markers and does not detect the oncoming traffic. Is there something that I'm doing wrong?
Also, is there a way to visualize the images in /apollo/sensor/camera/obstacle/front_6mm ?
I tried to visualize them in rqt_image_view but it does not recognize the encoding (yuyv encoding?).
 hadiTab
hadiTab
All 14 comments
"it only detects the lane markers and does not detect the oncoming traffic" How did you manage to see the results ? Any pointers?
 linux-devil
on 1 Jun 2018
linux-devil
on 1 Jun 2018
@linux-devil it may not actually be "seeing" those, but those are the only items published in the output topics for those two modules (/apollo/perception/obstacles and /apollo/prediction).
I'm also not able to run the perception lowcost visualizer as described here. Nothing happens after I launch it.
hadiTab
on 1 Jun 2018
@linux-devil @hadiTab
Same problem here. I also cannot run the perception lowcost visualizer and I also cannot view the images in /apollo/sensor/camera/obstacle/front_6mm.
anyone figure this out?
I toggle camera view, then a small rectangle appears in top left corner doesn't appear to show anything...
Have you guys tried this fix ? https://github.com/ApolloAuto/apollo/blob/master/docs/howto/how_to_run_apollo_2.5_with_ubuntu16.md
 snuffysasa
on 15 Jun 2018
snuffysasa
on 15 Jun 2018
@hadiTab @linux-devil @snuffysasa
I have the same issue. I don't see any pop-up windows with the visualizer.
Did you manage the issue?
Thanks!
 alexbuyval
on 3 Jul 2018
alexbuyval
on 3 Jul 2018
@alexbuyval and @snuffysasa I have not been able to solve the issue yet.
hadiTab
on 3 Jul 2018
@alexbuyval @hadiTab @linux-devil
I have not figured it out yet either.
Any updates?
snuffysasa
on 6 Jul 2018
@weidezhang @eugenegx @techoe @kechxu @gchen-apollo have any of you had a chance to check this out yet? Thanks.
hadiTab
on 6 Jul 2018
@hadiTab @linux-devil @alexbuyval
@weidezhang @eugenegx @techoe @kechxu @gchen-apollo
I solved my issues with these. I had a couple. Posting for other people
First, there seems to be a bug in launching the perception module, it never initializes the gl frame viewer. I did some debugging... and found a fix.
this is a quick trace
visualization_subnode.cc ProcEvents() hangs on line 374:
---> if (!SubscribeEvents(event_meta, &events)) {
which causes it to never reach the important line 400:
--->frame_visualizer_->init();
The SubscribeEvents function hangs on line 219:
---> while (event_manager_->Subscribe(event_meta.event_id, &event, true)) {
moving over to event_manager.cc function Subscribe on line 83.
This function creates an EventQueue, which seems to be defined in event_manger.h and seems to implement class ConcurrentQueue in modules/perception/lib/base/concurrent_queue.h
I am not sure if its a problem with the class or a glitch with the event manager..
But anyways, the first time the subscribe Queue is called the queue size is 0... (seems odd it should be 1, for the current item??)
but this results in
-->queue->pop(event);
being called when the queue is empty... which causes it to just stall.
!!TLDR: I fixed this problem by simply adding these lines in event_manager.cc:
--> if (queue->size() == 0)
--> return true;
before -->queue->pop(event);
This seems to make the gl visualizer initialize now, but I am worried I am doing other harm.
After this, I still had tons of problems getting the frame visualizer to launch, but atleast I could see the errors which I found to be related to fragile nvidia graphics driver issues. That was a long battle, but found that it is necessary that when installing the Nvidia drivers
./NVIDIA.......etc...
it is necessary to use the --no-opengl-files flag, when installing on both the host and on the docker container...
This readme: https://github.com/ApolloAuto/apollo/blob/master/docs/quickstart/apollo_2_5_hardware_system_installation_guide_v1.md#installing-the-software-for-the-ipc
Should say to include the --no-opengl-files flag
After getting that all sorted out I now have the lowcost perception module running on my computer and can see the visualizer.
I do have one more smaller issue which I posted here:
https://github.com/ApolloAuto/apollo/issues/4872
snuffysasa
on 8 Jul 2018
Matthew,
Thank you so much for digging into it! We will fix the issue ASAP.
Tae Eun
On Mon, Jul 9, 2018 at 3:12 AM, Matthew Linder notifications@github.com
wrote:
@hadiTab https://github.com/hadiTab @linux-devil
https://github.com/linux-devil @alexbuyval
https://github.com/alexbuyval@weidezhang https://github.com/weidezhang @eugenegx
https://github.com/eugenegx @techoe https://github.com/techoe @kechxu
https://github.com/kechxu @gchen-apollo
https://github.com/gchen-apolloI solved my issues with these. I had a couple. Posting for other people
First, there seems to be a bug in launching the perception module, it
never initializes the gl frame viewer. I did some debugging... and found a
fix.this is a quick trace
visualization_subnode.cc ProcEvents() hangs on line 374:
---> if (!SubscribeEvents(event_meta, &events)) {which causes it to never reach the important line 400:
--->frame_visualizer_->init();The SubscribeEvents function hangs on line 219:
---> while (event_manager_->Subscribe(event_meta.event_id, &event, true))
{moving over to event_manager.cc function Subscribe on line 83.
This function creates an EventQueue, which seems to be defined in
event_manger.h and seems to implement class ConcurrentQueue in
modules/perception/lib/base/concurrent_queue.hI am not sure if its a problem with the class or a glitch with the event
manager..But anyways, the first time the subscribe Queue is called the queue size
is 0... (seems odd it should be 1, for the current item??)but this results in
-->queue->pop(event);
being called when the queue is empty... which causes it to just stall.!!TLDR: I fixed this problem by simply adding:
--> if (queue->size() == 0)
--> return true;before -->queue->pop(event);
This seems to make the gl visualizer initialize now, but I am worried I am
doing other harm.—
You are receiving this because you were mentioned.
Reply to this email directly, view it on GitHub
https://github.com/ApolloAuto/apollo/issues/4307#issuecomment-403309567,
or mute the thread
https://github.com/notifications/unsubscribe-auth/AK_U0Ilz6H_9BaXs2552YKORefAr1iUYks5uElmCgaJpZM4UUL6n
.
 techoe
on 9 Jul 2018
techoe
on 9 Jul 2018
How to show the front_image(/apollo/sensor/camera/obstacle/front_6mm) when play the demo_2.5.bag ?
by default, Dreamview handler the topic camera/image_raw when FLAGS_use_navigation_mode is true and /apollo/sensor/camera/traffic/image_short when FLAGS_use_navigation_mode is false ,like codes:
if (FLAGS_use_navigation_mode) {
AdapterManager::AddCompressedImageCallback(&ImageHandler::OnImage, this);
} else {
AdapterManager::AddImageShortCallback(&ImageHandler::OnImage, this);
}
so Now Dreamview NOT support the topic /apollo/sensor/camera/obstacle/front_6mm recorded in demo_2.5.bag. if you want to show this topic, you need to add the configuration and code like :
Configuration: add
```conf apollo/modules/dreamview/conf/adapter.conf
config {
type: FRONT_IMAGE
mode: RECEIVE_ONLY
message_history_limit: 1
}
Code:
```cpp
if (FLAGS_use_navigation_mode) {
AdapterManager::AddCompressedImageCallback(&ImageHandler::OnImage, this);
} else {
AdapterManager::AddImageFrontCallback(&ImageHandler::OnImage, this);
}
then play the bag, you will see :
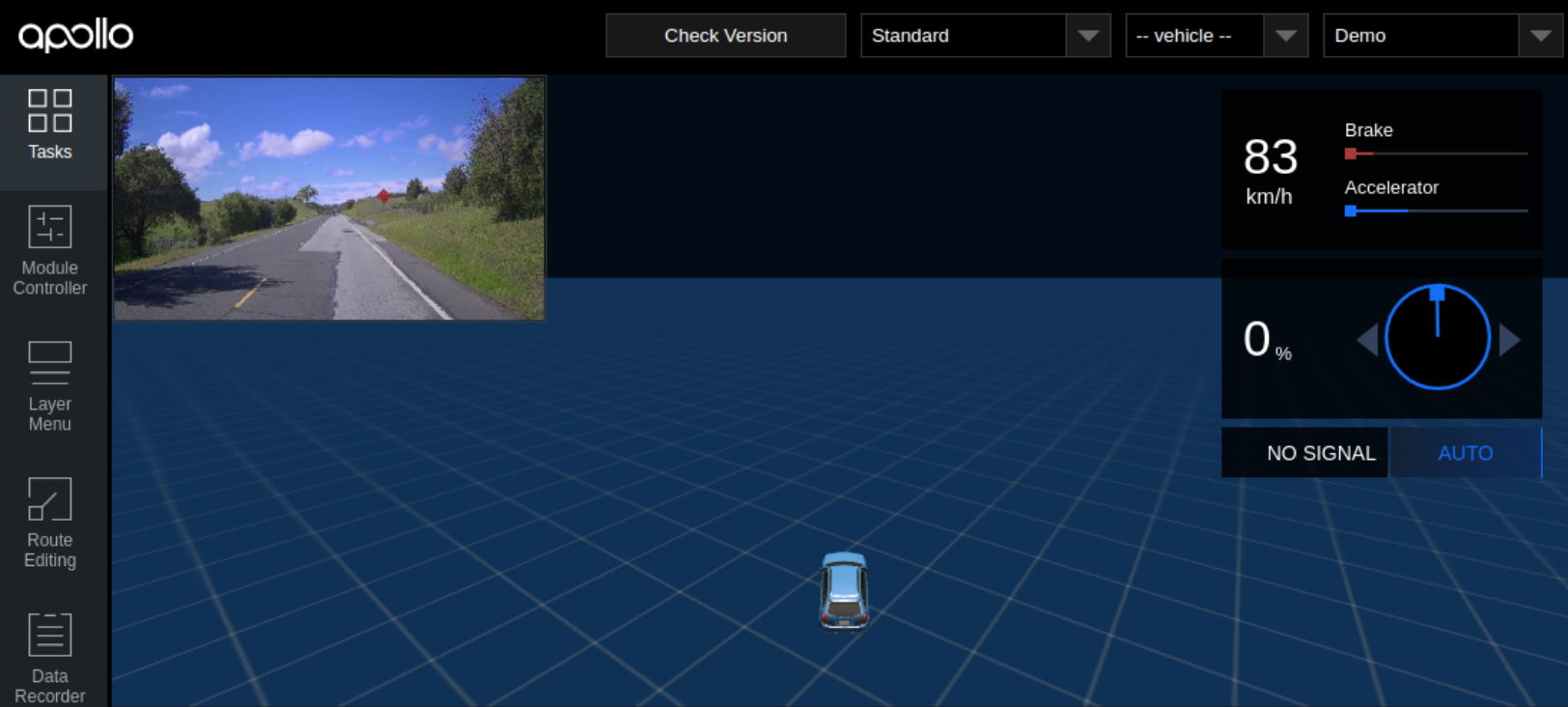
 mickeyouyou
on 10 Jul 2018
mickeyouyou
on 10 Jul 2018
siyang have enhanced the topic (/apollo/sensor/camera/obstacle/front_6mm) show in the Dreamview #4920.
mickeyouyou
on 10 Jul 2018
I didn't see the pop up visualizer either on my ubuntu 16.04. Any updates?
 liuyangly25
on 14 Aug 2018
liuyangly25
on 14 Aug 2018
Dreamview should be able to visualize camera topics. @hadiTab, If you still have an issue please let us know.
techoe
on 14 Feb 2019
I am closing it since there is no update after last answer.
techoe
on 21 Mar 2019
Related issues
 BenBaek
·
3Comments
BenBaek
·
3Comments
 zmsunnyday
·
3Comments
zmsunnyday
·
3Comments
 lesun90
·
3Comments
lesun90
·
3Comments
 lyletbjohnson
·
3Comments
lyletbjohnson
·
3Comments
 xinwf
·
3Comments
xinwf
·
3Comments
Most helpful comment
@hadiTab @linux-devil @alexbuyval
@weidezhang @eugenegx @techoe @kechxu @gchen-apollo
I solved my issues with these. I had a couple. Posting for other people
First, there seems to be a bug in launching the perception module, it never initializes the gl frame viewer. I did some debugging... and found a fix.
this is a quick trace
visualization_subnode.cc ProcEvents() hangs on line 374:
---> if (!SubscribeEvents(event_meta, &events)) {
which causes it to never reach the important line 400:
--->frame_visualizer_->init();
The SubscribeEvents function hangs on line 219:
---> while (event_manager_->Subscribe(event_meta.event_id, &event, true)) {
moving over to event_manager.cc function Subscribe on line 83.
This function creates an EventQueue, which seems to be defined in event_manger.h and seems to implement class ConcurrentQueue in modules/perception/lib/base/concurrent_queue.h
I am not sure if its a problem with the class or a glitch with the event manager..
But anyways, the first time the subscribe Queue is called the queue size is 0... (seems odd it should be 1, for the current item??)
but this results in
-->queue->pop(event);
being called when the queue is empty... which causes it to just stall.
!!TLDR: I fixed this problem by simply adding these lines in event_manager.cc:
--> if (queue->size() == 0)
--> return true;
before -->queue->pop(event);
This seems to make the gl visualizer initialize now, but I am worried I am doing other harm.
After this, I still had tons of problems getting the frame visualizer to launch, but atleast I could see the errors which I found to be related to fragile nvidia graphics driver issues. That was a long battle, but found that it is necessary that when installing the Nvidia drivers
./NVIDIA.......etc...
it is necessary to use the --no-opengl-files flag, when installing on both the host and on the docker container...
This readme: https://github.com/ApolloAuto/apollo/blob/master/docs/quickstart/apollo_2_5_hardware_system_installation_guide_v1.md#installing-the-software-for-the-ipc
Should say to include the --no-opengl-files flag
After getting that all sorted out I now have the lowcost perception module running on my computer and can see the visualizer.
I do have one more smaller issue which I posted here:
https://github.com/ApolloAuto/apollo/issues/4872